TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025162351
公報種別
公開特許公報(A)
公開日
2025-10-27
出願番号
2024065600
出願日
2024-04-15
発明の名称
パレット検出装置、パレット検出方法及びパレット検出プログラム
出願人
株式会社NICHIJO
,
JFEスチール株式会社
代理人
弁理士法人有古特許事務所
主分類
G05D
1/667 20240101AFI20251020BHJP(制御;調整)
要約
【課題】パレット検出装置において、キャリアパレット車が向かうべき目標点を簡易に算出することを目的とする。
【解決手段】本開示の一態様に係るパレット検出装置は、キャリアパレット車の幅方向に沿って延びるX軸と、X軸に直交しキャリアパレット車の長手方向に沿って延びるY軸と、を含む2次元座標によって表されかつ検出対象物に対応する点群データを出力する光学式検出器と、処理回路と、を備え、処理回路は、検出対象物がパレットの一対の脚部であると判定した場合に、一対の脚部の一方に対応する第1点群データに基づいて第1仮想点を演算し、一対の脚部の他方に対応する第2点群データに基づいて第2仮想点を演算し、キャリアパレット車が向かうべき目標点として、第1仮想点と第2仮想点とを結ぶ線分の中点を演算するように構成される。
【選択図】図3
特許請求の範囲
【請求項1】
パレットを検出する装置であって、
前記パレットは、重量物が積載される積載部と、前記積載部を支持する複数の脚部と、を備え、前記複数の脚部は、前記パレットの長手方向の端部において前記パレットの幅方向に互いに間隔を空けて配置される一対の脚部を含み、
前記装置は、
キャリアパレット車に取り付けられた状態において、前記キャリアパレット車の周囲に存在する検出対象物によって反射する光が入力され、前記キャリアパレット車の幅方向に沿って延びるX軸と、前記X軸に直交し前記キャリアパレット車の長手方向に沿って延びるY軸と、を含む2次元座標によって表され、かつ、前記検出対象物に対応する点群データを出力する光学式検出器と、
前記光学式検出器に接続される処理回路と、を備え、
前記処理回路は、
前記光学式検出器から前記点群データを取得し、
前記点群データに基づいて、前記検出対象物が前記一対の脚部であるか否かを判定し、
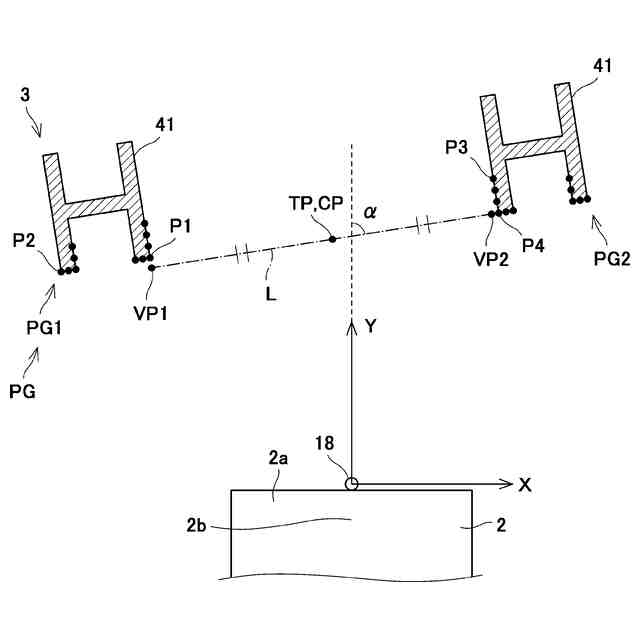
前記検出対象物が前記一対の脚部であると判定した場合に、前記点群データのうち前記一対の脚部の一方に対応する第1点群データのなかで、X軸方向において前記一対の脚部の他方に最も近い第1点のX座標を第1X座標とし、前記第1点群データのなかで、Y軸方向において前記キャリアパレット車に最も近い第2点のY座標を第1Y座標とする第1仮想点を演算し、
前記検出対象物が前記一対の脚部であると判定した場合に、前記点群データのうち前記一対の脚部の前記他方に対応する第2点群データのなかで、X軸方向において前記一対の脚部の前記一方に最も近い第3点のX座標を第2X座標とし、前記第2点群データのなかで、Y軸方向において前記キャリアパレット車に最も近い第4点のY座標を第2Y座標とする第2仮想点を演算し、
前記キャリアパレット車が向かうべき目標点として、前記第1仮想点と前記第2仮想点とを結ぶ線分の中点を演算するように構成される、パレット検出装置。
続きを表示(約 1,200 文字)
【請求項2】
前記処理回路は、前記線分に対する前記X軸又は前記Y軸の角度を演算するように構成される、請求項1に記載のパレット検出装置。
【請求項3】
前記光学式検出器は、前記キャリアパレット車の長手方向の端部、かつ、前記キャリアパレット車の幅方向の中央部に取り付けられ、
前記2次元座標の原点は、前記光学式検出器の配置点に設定される、請求項1又は2に記載のパレット検出装置。
【請求項4】
前記光学式検出器は、レーザ光を水平方向に走査して測距可能な2D-LiDAR(Light Detection And Ranging)を含む、請求項1又は2に記載のパレット検出装置。
【請求項5】
パレットを検出する方法であって、
前記パレットは、重量物が積載される積載部と、前記積載部を支持する複数の脚部と、を備え、前記複数の脚部は、前記パレットの長手方向の端部において前記パレットの幅方向に互いに間隔を空けて配置される一対の脚部を含み、
前記方法は、
キャリアパレット車に取り付けられた状態において、前記キャリアパレット車の周囲に存在する検出対象物によって反射する光が入力され、前記キャリアパレット車の幅方向に沿って延びるX軸と、前記X軸に直交し前記キャリアパレット車の長手方向に沿って延びるY軸と、を含む2次元座標によって表され、かつ、前記検出対象物に対応する点群データを出力する光学式検出器から前記点群データを取得することと、
前記点群データに基づいて、前記検出対象物が前記一対の脚部であるか否かを判定することと、
前記検出対象物が前記一対の脚部であると判定した場合に、前記点群データのうち前記一対の脚部の一方に対応する第1点群データのなかで、X軸方向において前記一対の脚部の他方に最も近い第1点のX座標を第1X座標とし、前記第1点群データのなかで、Y軸方向において前記キャリアパレット車に最も近い第2点のY座標を第1Y座標とする第1仮想点を演算することと、
前記検出対象物が前記一対の脚部であると判定した場合に、前記点群データのうち前記一対の脚部の前記他方に対応する第2点群データのなかで、X軸方向において前記一対の脚部の前記一方に最も近い第3点のX座標を第2X座標とし、前記第2点群データのなかで、Y軸方向において前記キャリアパレット車に最も近い第4点のY座標を第2Y座標とする第2仮想点を演算することと、
前記キャリアパレット車が向かうべき目標点として、前記第1仮想点と前記第2仮想点とを結ぶ線分の中点を演算することと、を備える、パレット検出方法。
【請求項6】
請求項5に記載されたパレット検出方法をプロセッサに実行させる、パレット検出プログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、パレット検出装置、パレット検出方法及びパレット検出プログラムに関する。
続きを表示(約 3,100 文字)
【背景技術】
【0002】
特許文献1には、パレットを検出する装置が記載されている。この装置では、まず、キャリアパレット車に対するパレットのおおよその位置に関する概略位置情報が把握される。次に、キャリアパレット車からパレットの一対の脚部に検出光が投光され、検出光の反射光が受光されることによって、反射地点に関する複数の検出データが取得される。次に、複数の検出データから、反射地点の集合である点群データのなかで点群データの並列方向が変わる反射地点であるコーナ点が検出される。次に、点群データがコーナ点で区切られた複数のグループに分けられる。次に、複数のグループが、概略位置情報に基づいてパレットの幅方向に並ぶ横グループ又はパレットの奥行方向に並ぶ縦グループに分類される。最後に、縦グループ及び横グループの少なくとも一方に属する複数の検出データを用いて、パレットの幅方向の中心を通ってパレットの長さ方向に延びる中心線が導出される。
【先行技術文献】
【特許文献】
【0003】
特開2022-188455号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1では、各脚部において複数の検出データを縦グループ及び横グループに分類する等、比較的複雑な演算を行うことが必要であるために処理が複雑となる。
【0005】
本開示は、パレット検出装置において、キャリアパレット車が向かうべき目標点を簡易に算出することを目的とする。
【課題を解決するための手段】
【0006】
本開示の一態様に係るパレット検出装置は、パレットを検出する装置であって、前記パレットは、重量物が積載される積載部と、前記積載部を支持する複数の脚部と、を備え、前記複数の脚部は、前記パレットの長手方向の端部において前記パレットの幅方向に互いに間隔を空けて配置される一対の脚部を含み、前記装置は、キャリアパレット車に取り付けられた状態において、前記キャリアパレット車の周囲に存在する検出対象物によって反射する光が入力され、前記キャリアパレット車の幅方向に沿って延びるX軸と、前記X軸に直交し前記キャリアパレット車の長手方向に沿って延びるY軸と、を含む2次元座標によって表され、かつ、前記検出対象物に対応する点群データを出力する光学式検出器と、前記光学式検出器に接続される処理回路と、を備え、前記処理回路は、前記光学式検出器から前記点群データを取得し、前記点群データに基づいて、前記検出対象物が前記一対の脚部であるか否かを判定し、前記検出対象物が前記一対の脚部であると判定した場合に、前記点群データのうち前記一対の脚部の一方に対応する第1点群データのなかで、X軸方向において前記一対の脚部の他方に最も近い第1点のX座標を第1X座標とし、前記第1点群データのなかで、Y軸方向において前記キャリアパレット車に最も近い第2点のY座標を第1Y座標とする第1仮想点を演算し、前記検出対象物が前記一対の脚部であると判定した場合に、前記点群データのうち前記一対の脚部の前記他方に対応する第2点群データのなかで、X軸方向において前記一対の脚部の前記一方に最も近い第3点のX座標を第2X座標とし、前記第2点群データのなかで、Y軸方向において前記キャリアパレット車に最も近い第4点のY座標を第2Y座標とする第2仮想点を演算し、前記キャリアパレット車が向かうべき目標点として、前記第1仮想点と前記第2仮想点とを結ぶ線分の中点を演算するように構成される。
【0007】
本開示の一態様に係るパレット検出方法は、パレットを検出する方法であって、前記パレットは、重量物が積載される積載部と、前記積載部を支持する複数の脚部と、を備え、前記複数の脚部は、前記パレットの長手方向の端部において前記パレットの幅方向に互いに間隔を空けて配置される一対の脚部を含み、前記方法は、前記キャリアパレット車に取り付けられた状態において、前記キャリアパレット車の周囲に存在する検出対象物によって反射する光が入力され、前記キャリアパレット車の幅方向に沿って延びるX軸と、前記X軸に直交し前記キャリアパレット車の長手方向に沿って延びるY軸と、を含む2次元座標によって表され、かつ、前記検出対象物に対応する点群データを出力する光学式検出器から前記点群データを取得することと、前記点群データに基づいて、前記検出対象物が前記一対の脚部であるか否かを判定することと、前記検出対象物が前記一対の脚部であると判定した場合に、前記点群データのうち前記一対の脚部の一方に対応する第1点群データのなかで、X軸方向において前記一対の脚部の他方に最も近い第1点のX座標を第1X座標とし、前記第1点群データのなかで、Y軸方向において前記キャリアパレット車に最も近い第2点のY座標を第1Y座標とする第1仮想点を演算することと、前記検出対象物が前記一対の脚部であると判定した場合に、前記点群データのうち前記一対の脚部の前記他方に対応する第2点群データのなかで、X軸方向において前記一対の脚部の前記一方に最も近い第3点のX座標を第2X座標とし、前記第2点群データのなかで、Y軸方向において前記キャリアパレット車に最も近い第4点のY座標を第2Y座標とする第2仮想点を演算することと、前記キャリアパレット車が向かうべき目標点として、前記第1仮想点と前記第2仮想点とを結ぶ線分の中点を演算することと、を備える。
【0008】
本開示の一態様に係るパレット検出プログラムは、前記パレット検出方法をプロセッサに実行させる。前記プログラムは、コンピュータが読み取り可能な記憶媒体に記憶され得る。前記記憶媒体は、非一時的(non-transitory)で有形(tangible)な媒体である。前記記憶媒体は、コンピュータに内蔵または外付けされ得る。コンピュータは、例えば、携帯情報端末、パーソナルコンピュータ、又はサーバ等を含む。前記記憶媒体は、RAM、ROM、EEPROM、及び外部記憶装置等を含む。前記記憶媒体は、例えば、ハードディスク、フラッシュメモリ、又は光ディスク等とし得る。前記記憶媒体に記憶されたプログラムは、前記記憶媒体が直接接続されるコンピュータにおいて実行されてもよいし、前記記憶媒体と通信ネットワークを介して接続されたコンピュータにおいて実行されてもよい。通信ネットワークは、例えば、LAN(Local Area Network)又はインターネット等を含む。
【0009】
本開示の一態様によれば、パレット検出装置において、キャリアパレット車が向かうべき目標点を簡易に算出できる。
【図面の簡単な説明】
【0010】
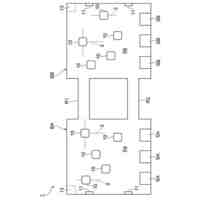
図1は、実施形態に係るパレット検出装置を備えるキャリアパレット車及びパレットの概略図である。
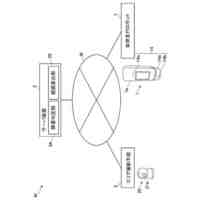
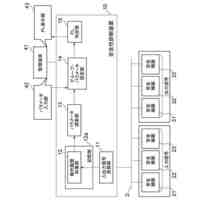
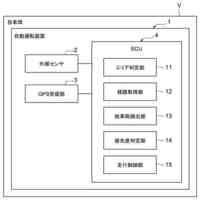
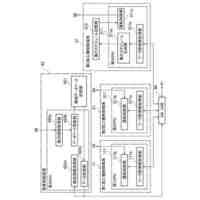
図2は、キャリアパレット車の制御システムのブロック図である。
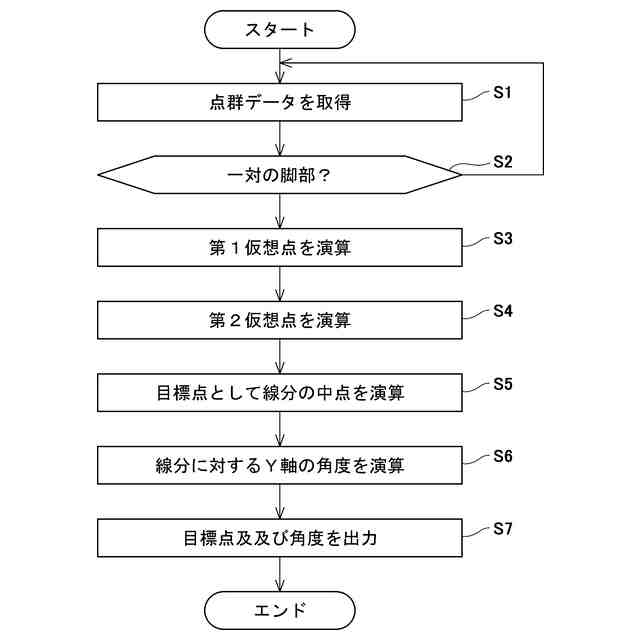
図3は、実施形態に係るパレット検出装置の処理回路によって行われる処理のフローチャートである。
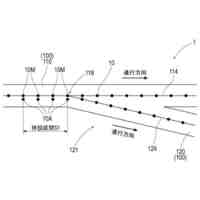
図4は、点群データ、第1仮想点、及び第2仮想点と、目標点としての中点と、を示す模式図である。
図5は、目標点に向けてキャリアパレット車が走行している様子を示す模式図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
生産早送り装置
3か月前
株式会社豊田自動織機
産業車両
3か月前
株式会社カネカ
製造システム
2か月前
オムロン株式会社
スレーブ装置
1か月前
愛知製鋼株式会社
車両用システム
2か月前
株式会社熊谷組
障害物の検出方法
1か月前
ローム株式会社
基準電圧源
2か月前
新電元工業株式会社
作業用ロボット
1か月前
株式会社クボタ
作業車
25日前
個人
作業車両自動化システム
3か月前
豊田合成株式会社
機器制御装置
1か月前
株式会社ダイフク
搬送設備
2か月前
株式会社ダイフク
搬送設備
3か月前
トヨタ自動車株式会社
移動制御システム
3か月前
株式会社アサヒエンタープライズ
調整弁
12日前
株式会社ダイフク
搬送設備
2か月前
株式会社ダイフク
物品搬送設備
26日前
株式会社ダイフク
物品搬送設備
4日前
カヤバ株式会社
減圧弁
1か月前
キヤノン株式会社
配送システム
2か月前
株式会社ダイフク
物品搬送設備
2か月前
トヨタ自動車株式会社
制御装置
1か月前
トヨタ自動車株式会社
クラッチペダル
3か月前
エイブリック株式会社
電流補償回路及び半導体装置
1か月前
ルネサスエレクトロニクス株式会社
半導体装置
3か月前
キヤノン電子株式会社
加工システム、及び、加工装置
3か月前
キヤノン電子株式会社
加工システム、及び、加工装置
3か月前
愛知製鋼株式会社
マーカシステム及び制御方法
2か月前
村田機械株式会社
搬送車システム
1か月前
株式会社CAOS
移動体の制御システム
2か月前
株式会社TMEIC
安全性診断装置
2か月前
日野自動車株式会社
自動運転装置
1か月前
株式会社アマダ
工作機械制御装置
1か月前
オムロン株式会社
システム及び方法
27日前
オムロン株式会社
システム及び方法
27日前
株式会社明電舎
負荷制御装置
27日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ