TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025123980
公報種別
公開特許公報(A)
公開日
2025-08-25
出願番号
2024019803
出願日
2024-02-13
発明の名称
クラッチペダル
出願人
トヨタ自動車株式会社
代理人
個人
,
個人
主分類
G05G
1/30 20080401AFI20250818BHJP(制御;調整)
要約
【課題】操作感やフィーリングを変えずに、戻し操作の踏力を低減させ、半クラッチをはじめとした、戻し操作の操作性やクラッチフィーリングを向上できるクラッチペダルを提供する。
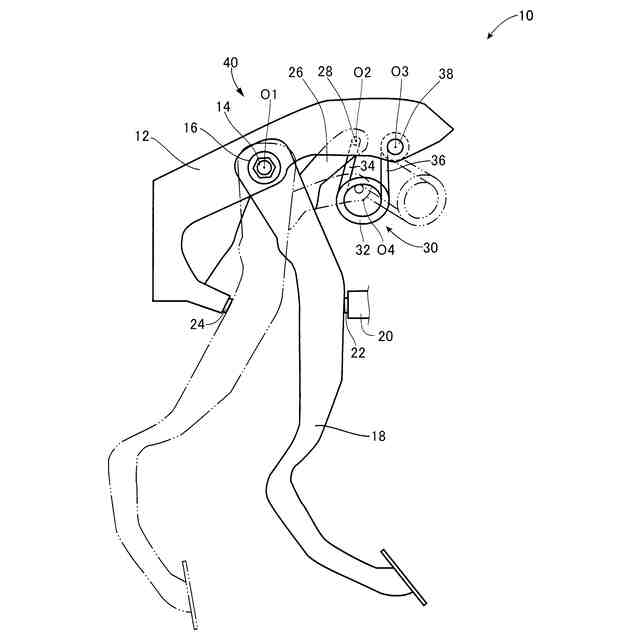
【解決手段】クラッチペダル10は、クラッチペダル10が戻し方向に回動する場合に、摩擦制動力Wを生じる一方向制動機構40を備える。これにより、戻し操作時の踏力は、踏込み操作時の踏力から摩擦制動力Wを低減した値となる。したがって、クラッチペダル10の戻し操作においても、踏込み操作時の踏力特性に準じた踏力特性が得られ、操作感やフィーリングを変えずに、戻し操作の踏力が低減され、半クラッチをはじめとした、戻し操作の操作性やクラッチフィーリングを向上できるクラッチペダルが提供できる。
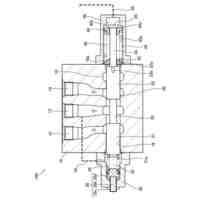
【選択図】図2
特許請求の範囲
【請求項1】
踏込み方向及び戻り方向の回動により、クラッチ装置の遮断及び係合を行う、クラッチペダルであって、
前記クラッチペダルが戻り方向に回動する場合に、摩擦制動力を生じる一方向制動機構を備える
ことを特徴とするクラッチペダル。
続きを表示(約 260 文字)
【請求項2】
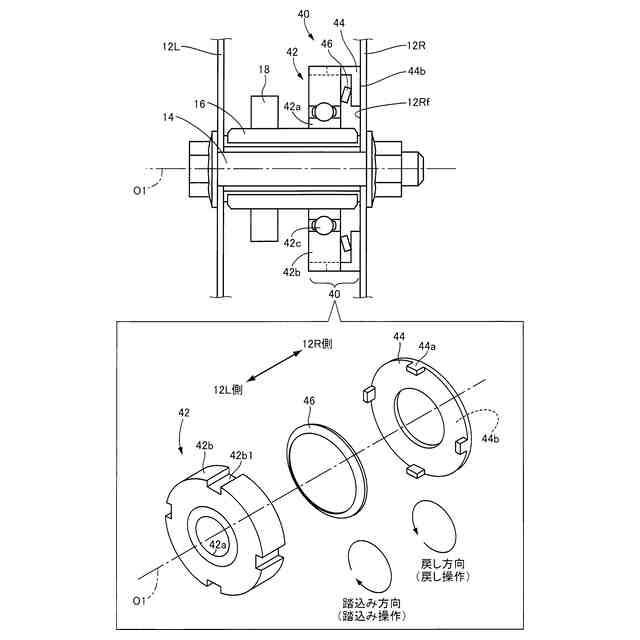
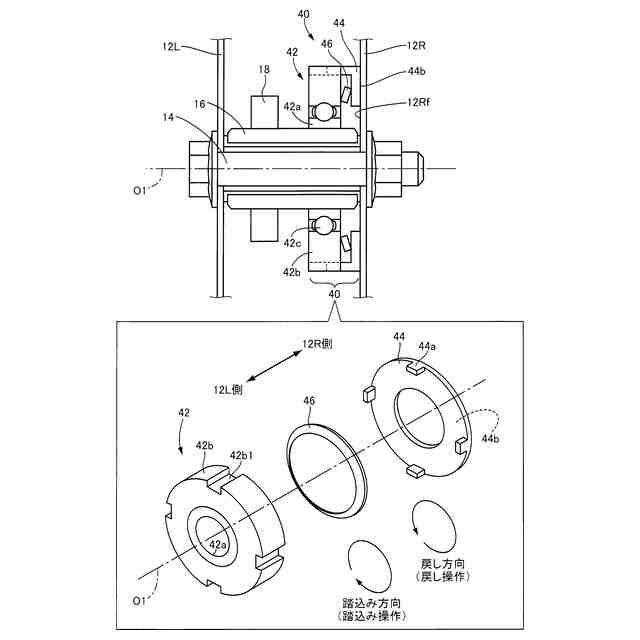
前記一方向制動機構は、前記クラッチペダルの回動軸に固定された内輪が踏込み方向のみに回転可能なワンウェイベアリングと、
前記ワンウェイベアリングの外輪に連結され、且つ前記回動軸を支持する壁面と面接することで、前記クラッチペダルが戻り方向に回動する場合に、摩擦制動力を発生させる摩擦材プレートと、
前記ワンウェイベアリングと前記摩擦材プレートとの間に介挿され、前記壁面と前記摩擦材プレートとの面接圧を付勢する皿ばねと、を備える
ことを特徴とする請求項1のクラッチペダル。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両用クラッチ装置のクラッチペダルに関するものである。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
車両のクラッチペダルは、ペダルブラケットによって回動可能に支持されているが、これを踏み込んでクラッチを遮断する際には比較的大きな踏力を必要とする。このため、クラッチペダル等の操作ペダルにおいて、その踏込み当初は操作ペダルを原位置に向かって付勢するが、予め定められた一定角度だけ回動した後は踏込み方向に向かって付勢することにより、その踏込み操作を助勢する装置が良く知られている。例えば、特許文献1に記載されたターンオーバ装置がそれである。
【0003】
また、クラッチペダルの戻し操作においては、クラッチの係合操作であるため、半クラッチによる半係合状態から全係合に操作するといった、繊細な操作が求められる。これに反して、運転者がクラッチペダルを急に戻した場合は、クラッチの急激な係合で過大なショックが発生するため、その回避として、オリフィス装置でクラッチ戻し速度を遅くする、特許文献2に記載の技術も開示されている。
【先行技術文献】
【特許文献】
【0004】
実用新案登録第2582486号公報
特開2009-138760号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、クラッチペダルの戻し操作は、前述の通り、半クラッチをはじめ、繊細な操作が必要となるため、ペダルの操作力、即ち踏力は、踏込み操作に比べ低減される方が良い。但し、踏込み操作と戻し操作とで、踏力推移(変化)の特性(以下、踏力特性とする)が変わってしまうと、操作感やフィーリングに違和感が発生してしまうので、踏力特性を変えずに、戻し操作の踏力を低減することが、求められていた。特許文献2に記載の技術でも、踏力の低減はされるが、半クラッチ操作時は戻し速度が遅く低減効果が殆ど期待できない、また、踏力特性が変わり、操作感やフィーリングが変わってしまう等の課題があった。
【0006】
本発明は、以上の事情を背景として為されたものであり、その目的とするところは、操作感やフィーリングを変えずに、戻し操作の踏力を低減させ、半クラッチをはじめとした、戻し操作の操作性やクラッチフィーリングを向上できるクラッチペダルを提供することにある。
【課題を解決するための手段】
【0007】
第1の発明の要旨とするところは、(a)踏込み方向及び戻し方向の回動により、クラッチ装置の遮断及び係合を行う、クラッチペダルであって、(b)前記クラッチペダルが戻し方向に回動する場合に、摩擦制動力を生じる一方向制動機構を備えることにある。
【発明の効果】
【0008】
前記第1の発明によれば、前記クラッチペダルは、前記クラッチペダルが戻し方向に回動する場合に、摩擦制動力を生じる一方向制動機構を備える。これにより、戻し操作時の踏力は、踏込み操作時の踏力から前記摩擦制動力を低減した値となる。したがって、前記クラッチペダルの戻し操作においても、踏込み操作時の踏力特性に準じた踏力特性が得られ、操作感やフィーリングを変えずに、戻し操作の踏力が低減され、半クラッチをはじめとした、戻し操作の操作性やクラッチフィーリングを向上できる。
【図面の簡単な説明】
【0009】
本発明が適用されるクラッチペダルの概略構成の一例を説明する図である。
図1のクラッチペダルが備える一方向制動機構の構成及び作動を説明する図である。
図1のクラッチペダルの踏力特性の一例を説明する図である。
【発明を実施するための形態】
【0010】
以下、本発明の実施例を図面を参照して詳細に説明する。なお、以下の実施例において図は適宜簡略化或いは変形されており、各部の寸法比および形状等は必ずしも正確に描かれていない。
【実施例】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
生産早送り装置
3か月前
株式会社豊田自動織機
産業車両
3か月前
株式会社カネカ
製造システム
2か月前
オムロン株式会社
スレーブ装置
1か月前
株式会社熊谷組
障害物の検出方法
1か月前
ローム株式会社
基準電圧源
2か月前
愛知製鋼株式会社
車両用システム
2か月前
新電元工業株式会社
作業用ロボット
1か月前
株式会社クボタ
作業車
24日前
豊田合成株式会社
機器制御装置
1か月前
株式会社アサヒエンタープライズ
調整弁
11日前
株式会社ダイフク
搬送設備
2か月前
株式会社ダイフク
搬送設備
2か月前
キヤノン株式会社
配送システム
2か月前
カヤバ株式会社
減圧弁
1か月前
トヨタ自動車株式会社
制御装置
1か月前
株式会社ダイフク
物品搬送設備
3日前
株式会社ダイフク
物品搬送設備
25日前
エイブリック株式会社
電流補償回路及び半導体装置
1か月前
株式会社ダイフク
物品搬送設備
2か月前
トヨタ自動車株式会社
クラッチペダル
3か月前
株式会社TMEIC
安全性診断装置
1か月前
ルネサスエレクトロニクス株式会社
半導体装置
3か月前
株式会社CAOS
移動体の制御システム
2か月前
村田機械株式会社
搬送車システム
1か月前
株式会社アマダ
工作機械制御装置
1か月前
愛知製鋼株式会社
マーカシステム及び制御方法
2か月前
日野自動車株式会社
自動運転装置
1か月前
株式会社明電舎
負荷制御装置
26日前
株式会社明電舎
負荷制御装置
26日前
オムロン株式会社
システム及び方法
26日前
株式会社明電舎
負荷制御装置
26日前
トヨタ自動車株式会社
情報処理装置
1か月前
株式会社計数技研
移動体、及びプログラム
3日前
株式会社カーメイト
アクセルペダルカバー
1か月前
ローム株式会社
電源回路用の電子負荷装置
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ