TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025129669
公報種別
公開特許公報(A)
公開日
2025-09-05
出願番号
2024026451
出願日
2024-02-26
発明の名称
配送システム
出願人
キヤノン株式会社
代理人
個人
,
個人
,
個人
主分類
G05D
1/692 20240101AFI20250829BHJP(制御;調整)
要約
【課題】複数の自律移動体の連携動作を可能とし効率的な配送を実現する配送システムを提供する。
【解決手段】配送を連携する第1自律移動体及び第2自律移動体を制御して配送を行う配送システムであって、前記第1自律移動体及び前記第2自律移動体に制御指示を行う自律移動体制御手段と、3次元空間の位置を示す任意の基準系で規定された空間に存在する物体の状態と時間に関する情報である空間情報を、固有識別子を用いて識別するフォーマットに変換し保存する固有識別子変換手段と、を有し、前記固有識別子変換手段は、空間が複数物体の存在を許可する複数物体存在許可空間であるか否かを前記固有識別子に紐づけて記憶し、前記自律移動体制御手段は、前記複数物体存在許可空間で前記第1自律移動体と前記第2自律移動体とが配送の連携を行うよう制御することを特徴とする。
【選択図】図1
特許請求の範囲
【請求項1】
配送を連携する第1自律移動体及び第2自律移動体を制御して配送を行う配送システムであって、
前記第1自律移動体及び前記第2自律移動体を制御する自律移動体制御手段と、
3次元空間の位置を示す任意の基準系で規定された空間に存在する物体の状態と時間に関する情報である空間情報を、固有識別子を用いて識別するフォーマットに変換し保存する固有識別子変換手段と、
を有し、
前記固有識別子変換手段は、空間が複数物体の存在を許可する複数物体存在許可空間であるか否かを前記固有識別子に紐づけて記憶し、
前記自律移動体制御手段は、前記複数物体存在許可空間で前記第1自律移動体と前記第2自律移動体とが配送の連携を行うよう制御する
ことを特徴とする配送システム。
続きを表示(約 510 文字)
【請求項2】
空間が前記複数物体存在許可空間か否かは、該空間の静的情報により決定する
ことを特徴とする請求項1に記載の配送システム。
【請求項3】
前記自律移動体制御手段は、前記複数物体存在許可空間のうち連携空間で前記第1自律移動体と前記第2自律移動体とが配送の連携を行うよう制御する
ことを特徴とする請求項1に記載の配送システム。
【請求項4】
空間が前記連携空間か否かは該空間の動的情報により決定する
ことを特徴とする請求項3に記載の配送システム。
【請求項5】
前記連携空間は、前記複数物体存在許可空間のうちの歩行者が存在しない空間である
ことを特徴とする請求項3に記載の配送システム。
【請求項6】
空間の動的情報は、空間の静的情報よりも更新頻度が高い
ことを特徴とする請求項1に記載の配送システム。
【請求項7】
空間が前記連携空間か否かは、連携の妨げとなる事象をパラメータとして数値化し、該数値化した数値に基づいて決定する
ことを特徴とする請求項3に記載の配送システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、配送システムに関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
荷物の配送において、ドローンのような無人航空機を使った配送や、特定の敷地内での小型のロボットなどの自律移動体を使った配送などが検討されている。
【0003】
これらの無人航空機や自律移動体がお互いの衝突や障害物への衝突を回避しながら動作するための技術が提案されている。例えば、仮想空間が移動体の移動範囲を含む現実の空間に対応されて定義され、その仮想空間が措定の3次元形状の複数の領域に分割して管理されたシステムを利用する技術が提案されている。特許文献1では前述の技術において、各移動体の移動経路に同一の時間帯に同一の分割領域が含まれている場合、移動経路を変更する技術を提案している。
【先行技術文献】
【特許文献】
【0004】
特許第7138758号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
荷物の配送において、建造物の配置等に応じて配送先までの効率的な配送を行うために配送元から所定の場所までは地上を走行する自律移動体で荷物を運ぶことが考えられている。更に所定の場所で自律移動体からドローン等の無人航空機に荷物を載せ替え、配送先までは無人航空機により荷物を運ぶような連携配送システムが考えられている。しかしながら、特許文献1に記載のようなシステムにおいては、配送物の載せ替えのために所定の場所に複数の移動体が存在することができない。ひいては、効率的な配送を行うための連携配送システムを構築できない。
【0006】
本発明は、上記の課題に鑑みてなされたものであり、複数の自律移動体の連携動作を可能とし効率的な配送を実現する配送システムを提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明の一実施形態の配送システムは、配送を連携する第1自律移動体及び第2自律移動体を制御して配送を行う配送システムであって、前記第1自律移動体及び前記第2自律移動体に制御指示を行う自律移動体制御手段と、3次元空間の位置を示す任意の基準系で規定された空間に存在する物体の状態と時間に関する情報である空間情報を、固有識別子を用いて識別するフォーマットに変換し保存する固有識別子変換手段と、を有し、前記固有識別子変換手段は、空間が複数物体の存在を許可する複数物体存在許可空間であるか否かを前記固有識別子に紐づけて記憶し、前記自律移動体制御手段は、前記複数物体存在許可空間で前記第1自律移動体と前記第2自律移動体とが配送の連携を行うよう制御することを特徴とする。
【発明の効果】
【0008】
本発明によれば、複数の自律移動体の連携動作を可能とし効率的な配送を実現する配送システムを提供することができる。
【図面の簡単な説明】
【0009】
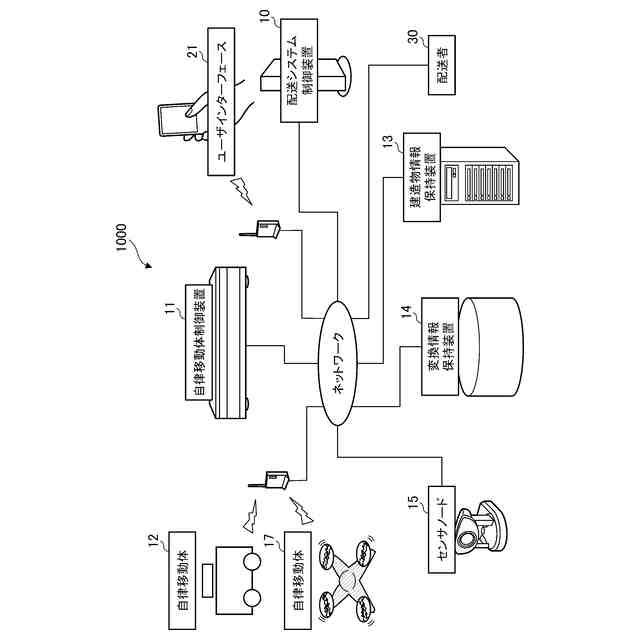
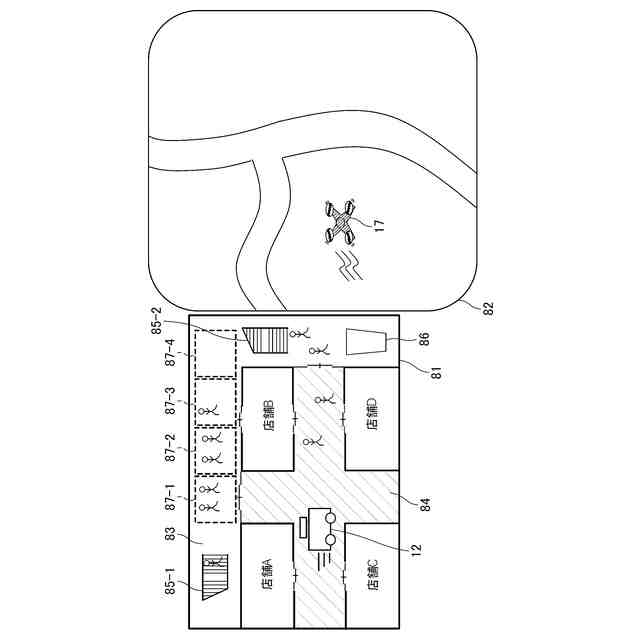
本発明の実施形態1に係る配送システムの全体構成の例を示す図である。
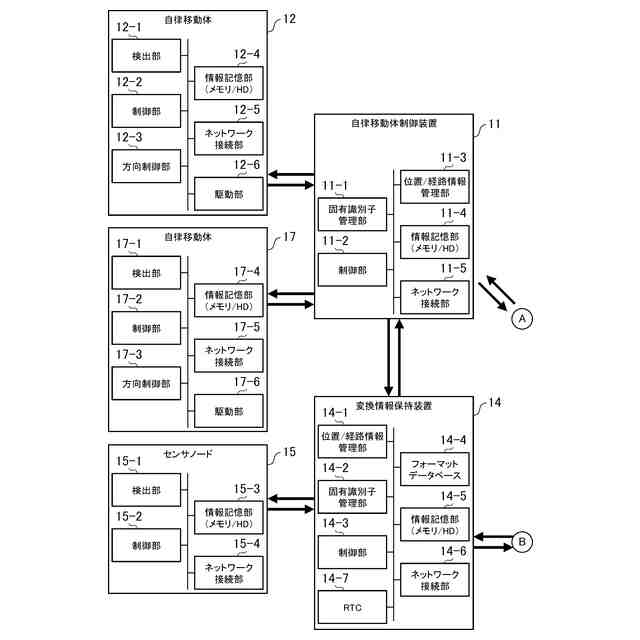
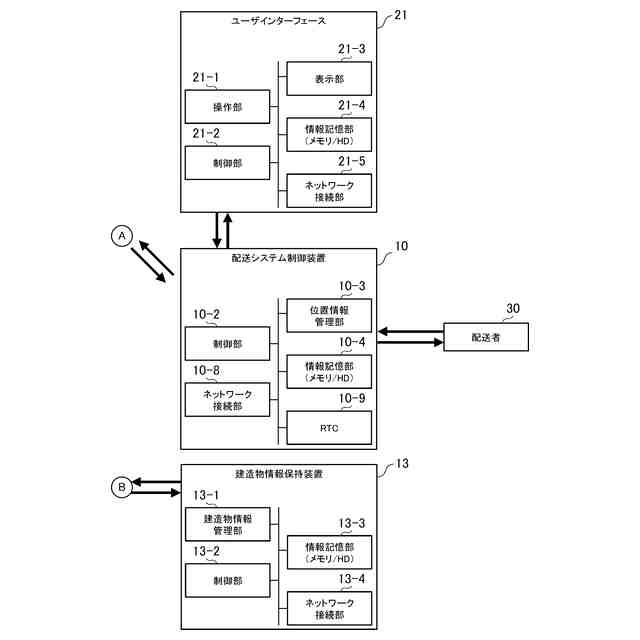
図1における配送システムの構成例を示す機能ブロック図である。
図1における配送システムの構成例を示す機能ブロック図である。
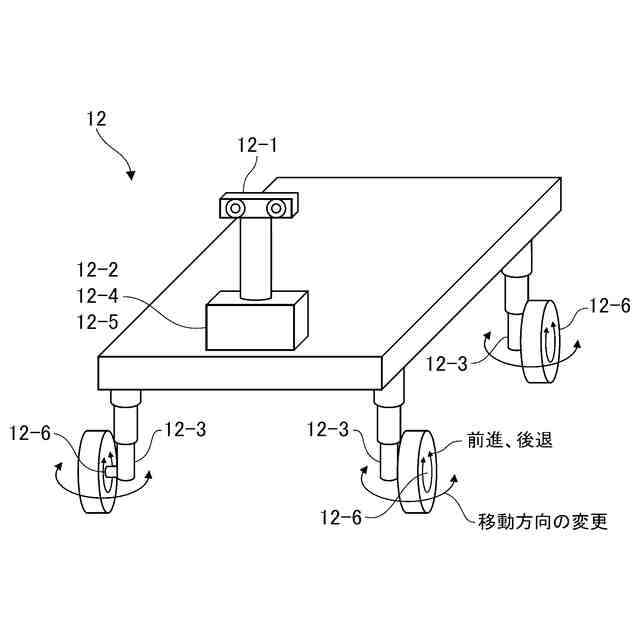
実施形態1に係る自律移動体12の構成例を示す斜視図である。
実施形態1に係る自律移動体17の構成例を示す斜視図である。
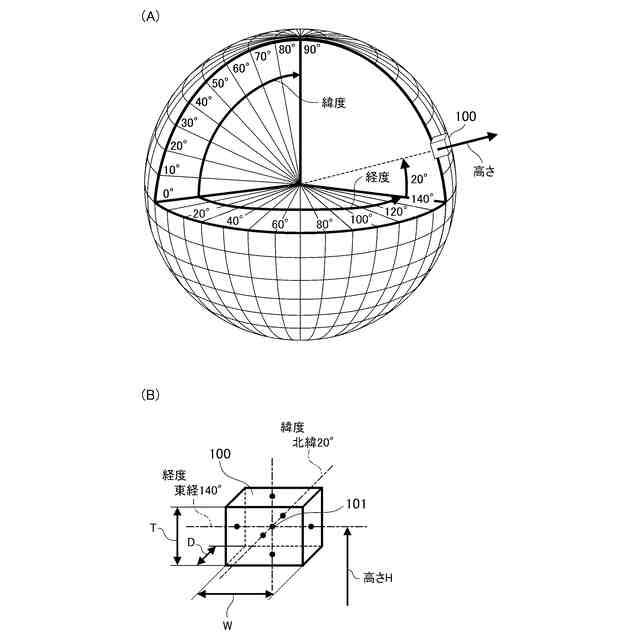
(A)、(B)は実施形態に係る自立移動体が利用する3次元マップを説明するための図である。
(A)は地球の緯度/経度情報を示す図であり、図7(B)は図7(A)の所定の空間100を示す斜視図である。
空間100内の空間情報を模式的に示した図である。
実施形態1に係る空間を示す図である。
センサノード15の処理を示すフローチャートである。
変換情報保持装置14の処理を示すフローチャートである。
実施形態1に係る配送時のシステム全体の流れを示すシーケンス図である。
実施形態1に係る配送時のシステム全体の流れを示すシーケンス図である。
実施形態1に係る配送時のシステム全体の流れを示すシーケンス図である。
実施形態1に係る配送時のシステム全体の流れを示すシーケンス図である。
本発明の実施形態2に係る配送システムの全体構成の例を示す図である。
図16における配送システムの構成例を示す機能ブロック図である。
図16における配送システムの構成例を示す機能ブロック図である。
実施形態2に係る空間を示す図である。
実施形態2に係る配送時のシステム全体の流れを示すシーケンス図である。
実施形態2に係る配送時のシステム全体の流れを示すシーケンス図である。
実施形態2に係る配送時のシステム全体の流れを示すシーケンス図である。
実施形態2に係る配送時のシステム全体の流れを示すシーケンス図である。
【発明を実施するための形態】
【0010】
以下、図面を参照して本発明の実施形態を、実施形態1を用いて説明する。ただし、本発明は以下の実施形態に限定されるものではない。尚、各図において、同一の部材又は要素については同一の参照番号を付し、重複する説明は省略又は簡略化する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
他の特許を見る


 特許ウォッチ
特許ウォッチ