TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025162616
公報種別
公開特許公報(A)
公開日
2025-10-28
出願番号
2024065880
出願日
2024-04-16
発明の名称
負荷制御装置
出願人
株式会社明電舎
代理人
個人
,
個人
,
個人
,
個人
主分類
G05B
11/36 20060101AFI20251021BHJP(制御;調整)
要約
【課題】軌道拘束された制御対象に対する負荷計算の軽減および負荷設計の自由度を確保する。
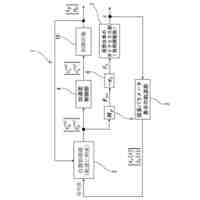
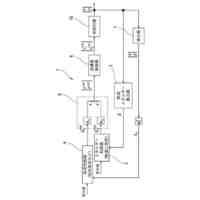
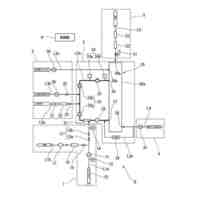
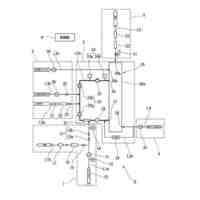
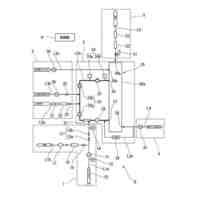
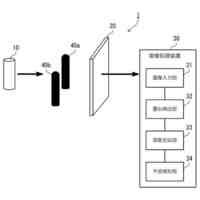
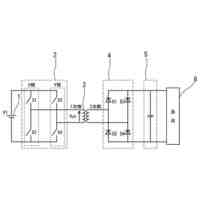
【解決手段】負荷制御装置1の軌道エネルギー算出器2は、制御対象10の応答位置から軌道エネルギーを算出する。エネルギー制御器3は、各アクチュエータの位置応答から算出された軌道エネルギーを指令値に応じて制御する第1加速度参照値を出力する。負荷制御器4は、前記軌道上に沿って印加する負荷を指令値に基づき制御する第2加速度参照値を出力する。加速度参照値算出部5は、第1加速度参照値に等エネルギー線の法線方向の単位ベクトルを反映させ、第2加速度参照値に等エネルギー線の接線方向の単位ベクトルを反映させ、それぞれを合算し、各アクチュエータの加速度参照値を算出する。加速度制御部6は、各アクチュエータの加速度参照値から各アクチュエータのトルク指令値を算出する。
【選択図】図1
特許請求の範囲
【請求項1】
制御対象の二次元平面上の運動の軌道を拘束し、該軌道上の負荷を印加する各アクチュエータを制御する装置であって、
前記各アクチュエータの位置応答から算出された軌道エネルギーを指令値に応じて制御することで前記軌道を拘束する第1加速度参照値を出力するエネルギー制御器と、
前記軌道上に沿って印加する前記負荷を指令値に基づき制御する第2加速度参照値を出力する負荷制御器と、
前記第1加速度参照値に等エネルギー線の法線方向の単位ベクトルを反映させる一方、前記第2加速度参照値に等エネルギー線の接線方向の単位ベクトルを反映させ、それぞれを合算することで前記各アクチュエータの加速度参照値を算出する加速度参照値算出部と、
前記各アクチュエータの加速度参照値から前記各アクチュエータのトルク指令値を算出する加速度制御部と、
を備えることを特徴とする負荷制御装置。
続きを表示(約 1,300 文字)
【請求項2】
制御対象の前記位置応答[x,y]から軌道エネルギーE「E=y-x
2
」を算出する軌道エネルギー算出器を備え、
前記エネルギー制御器は、軌道エネルギーEと指令値(ゼロ)とを一致させて陽関数「y=x
2
」の軌道で拘束する前記第1加速度参照値を算出する一方、
前記負荷制御器は、軌道エネルギーEの等エネルギー線の接線方向に負荷を発生させる前記第2加速度参照値を算出する
ことを特徴とする請求項1記載の負荷制御装置。
【請求項3】
制御対象の前記位置応答[x,y]から軌道エネルギーEを算出する軌道エネルギー算出器を備え、
前記軌道エネルギー算出器は、陰関数「f(x,y)=0」を成立させる前記軌道エネルギーと前記指令値とが入力され、前記陰関数の軌道上に拘束する前記第1加速度参照値を算出する一方、
前記負荷制御器は、軌道エネルギーEを「E=f(x,y)」とした際の等エネルギー線の接線方向に負荷を発生させる前記第2加速度参照値を算出する
ことを特徴とする請求項1記載の負荷制御装置。
【請求項4】
制御対象の前記位置応答[x,y]から軌道エネルギーEを算出する軌道エネルギー算出器を備え、
前記負荷制御器は、
前記アクチュエータの反力値(式24)が入力され、
式26により前記等エネルギー線の接線方向の反力を算出し、
式25の第2加速度参照値を算出することを特徴とする請求項1記載の負荷制御装置。
TIFF
2025162616000033.tif
27
166
TIFF
2025162616000034.tif
31
166
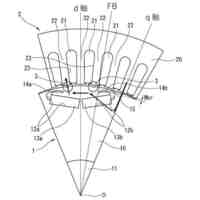
「e
s
」=等エネルギー線の接線方向の単位ベクトル
「F
s
res
」=等エネルギー線の接線方向の反力
TIFF
2025162616000035.tif
37
166
「F
s
cmd
」=軌道上の負荷力の指令値
「C
f
」=力制御ゲイン
【請求項5】
前記負荷制御器は、
前記式26の「F
s
res
=0」と仮定し、
式27を用いて第2加速度参照値を算出することを特徴とする請求項4記載の負荷制御装置。
TIFF
2025162616000036.tif
30
166
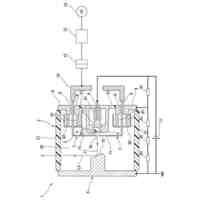
【請求項6】
前記制御対象は、
前記アクチュエータとして、
x軸の回転運動に対する電動機と、
y軸の直動運動に対する電動機と、
を備え、
前記モード変換部は、前記各電動機の位置応答「x,y」を前記アクチュエータの位置応答「x
1
,x
2
」として、
前記各運動の動作を拘束して負荷を印加することを特徴とする請求項2~5のいずれか記載の負荷制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、制御対象の動作する軌道を制御し、軌道上の動作に対する負荷を制御する装置に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
非特許文献1は、「拘束する軌道およびトルクリミットを拘束条件とし、最短時間で拘束する軌道に向かう制御入力を求める」最適化問題を定式化し、解を算出している。
【0003】
特許文献1および非特許文献2は、ロボットの手先位置を経路へ誘導するポテンシャル場を生成する。そのようなポテンシャル場を生成するためには、カーネルガウス関数を要素とする多くのポテンシャル場の重ね合わせ・重み調整が必要となる。経路への拘束を強めるためには谷断面の傾斜を急勾配とし、経路上の推進力を高めるには谷底の経路の落差を大きくするなどのポテンシャルの設計を行う。
【先行技術文献】
【特許文献】
【0004】
US11554485B2
【非特許文献】
【0005】
”An Efficient Robot Arm Control Under Geometric Path Constraints”
“Learning Potential Functions from Human Demonstrations with Encapsulated Dynamic and Compliant Behaviors”
Kiyoshi Ohishi,Yuzuru Ohba,Seiichiro Katsura “Kinematics and Dynamics of Motion Control Based on Acceleration Control” IEEJ Trans.IA,Vol.127,No6.2007
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、非特許文献1の技術は、制御対象の軌道を拘束することは可能なものの、軌道上の動作に対する負荷調整は想定されていない。
【0007】
そこで、非特許文献2および特許文献1の技術が提案されているが、ポテンシャル場が複雑であるほど要素となる関数の重ね合わせ・重み調整が多く必要となり、計算負荷が高まるおそれがある。
【0008】
また、軌道上の負荷については、ポテンシャル場の保存力を通して与えているため、時間に応じた負荷の変化などは与えることができず、負荷の設計自由度が制限されるおそれもある。
【0009】
本発明は、このような従来技術の問題を解決するためになされ、軌道拘束された制御対象に対する負荷計算の軽減および負荷設計の自由度を確保することを解決課題としている。
【課題を解決するための手段】
【0010】
(1)本発明は、制御対象の二次元平面上の運動の軌道を拘束し、該軌道上の負荷を印加する各アクチュエータを制御する装置であって、
前記各アクチュエータの位置応答から算出された軌道エネルギーを指令値に応じて制御することで前記軌道を拘束する第1加速度参照値を出力するエネルギー制御器と、
前記軌道上に沿って印加する前記負荷を指令値に基づき制御する第2加速度参照値を出力する負荷制御器と、
前記第1加速度参照値に等エネルギー線の法線方向の単位ベクトルを反映させる一方、前記第2加速度参照値に等エネルギー線の接線方向の単位ベクトルを反映させ、それぞれを合算することで前記各アクチュエータの加速度参照値を算出する加速度参照値算出部と、
前記各アクチュエータの加速度参照値から前記各アクチュエータのトルク指令値を算出する加速度制御部と、を備えることを特徴としている。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社明電舎
回転機
1か月前
株式会社明電舎
成膜装置
25日前
株式会社明電舎
回転電機
1か月前
株式会社明電舎
ドローン
1か月前
株式会社明電舎
負荷制御装置
24日前
株式会社明電舎
負荷制御装置
24日前
株式会社明電舎
負荷制御装置
24日前
株式会社明電舎
車両固定装置
1か月前
株式会社明電舎
車両固定装置
1か月前
株式会社明電舎
センサ固定用治具
1か月前
株式会社明電舎
電力系統システム
1か月前
株式会社明電舎
ロータ及び回転機
1か月前
株式会社明電舎
電流制御システム
1か月前
株式会社明電舎
オゾン水の生成装置
1か月前
株式会社明電舎
オゾン水の生成装置
1か月前
株式会社明電舎
オゾン水の生成装置
1か月前
株式会社明電舎
遮断器のリンク機構、遮断器
1か月前
株式会社明電舎
不良検知装置及び不良検知方法
1か月前
株式会社明電舎
半導体モジュールおよび電力変換装置
1か月前
株式会社明電舎
ロータ、回転電機及び車両駆動用装置
1か月前
株式会社明電舎
水冷式回転機のフレーム、及びその製造方法
1か月前
株式会社明電舎
目標車速パターンデータ生成方法及び試験方法
1か月前
株式会社明電舎
電力変換装置および電力変換装置のゲート指令生成方法
1か月前
株式会社明電舎
出力調整機構、電界放射装置及び電界放射装置の出力制御方法
1か月前
株式会社明電舎
絶縁型DC/DC変換器および絶縁型DC/DC変換器の制御方法
1か月前
国立大学法人長岡技術科学大学
グリッドフォーミングインバータの制御装置および制御方法
1か月前
個人
生産早送り装置
3か月前
株式会社豊田自動織機
産業車両
3か月前
株式会社カネカ
製造システム
2か月前
オムロン株式会社
スレーブ装置
1か月前
株式会社FUJI
加工機械ライン
4か月前
愛知製鋼株式会社
車両用システム
2か月前
ローム株式会社
基準電圧源
2か月前
株式会社熊谷組
障害物の検出方法
1か月前
株式会社クボタ
作業車
22日前
個人
作業車両自動化システム
3か月前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ