TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025140126
公報種別
公開特許公報(A)
公開日
2025-09-29
出願番号
2024039311
出願日
2024-03-13
発明の名称
目標車速パターンデータ生成方法及び試験方法
出願人
株式会社明電舎
代理人
個人
主分類
G01M
17/007 20060101AFI20250919BHJP(測定;試験)
要約
【課題】自動運転装置又は運転者によって幅広い運転態様を再現できる目標車速パターンデータを生成する目標車速パターンデータ生成方法及び試験方法を提供すること。
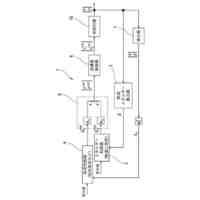
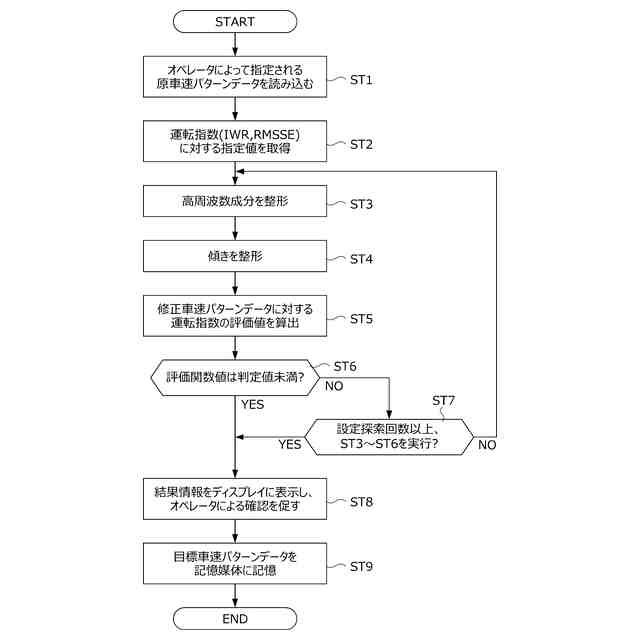
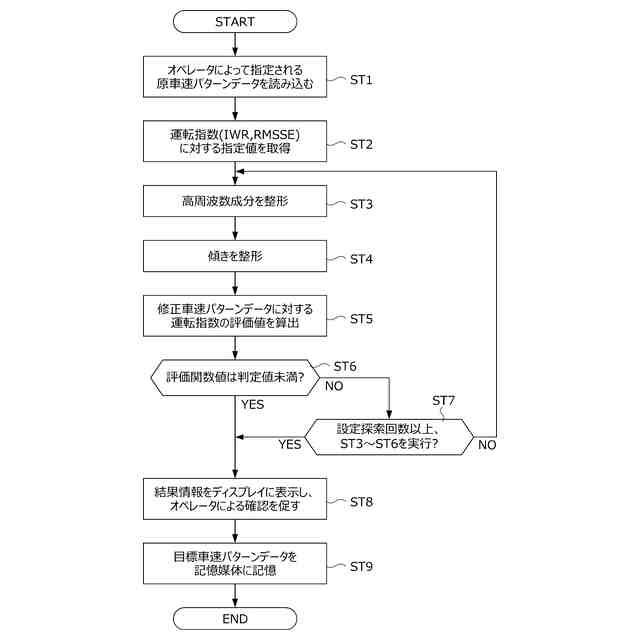
【解決手段】目標車速パターンデータ生成方法は、原車速パターンデータを読み込むステップST1と、運転指数に対する指定値を取得するステップST2と、原車速パターンデータのうち所定のカットオフ周波数より高周波数成分を整形することによって修正車速パターンデータを生成するステップST3と、原車速パターンデータを基準として修正車速パターンデータを評価することにより修正車速パターンデータに対する運転指数の評価値を算出するステップST5と、指定値と評価値との差を判定値未満にする修正車速パターンデータを目標車速パターンデータとして記憶媒体に記憶するステップST9と、を備える。
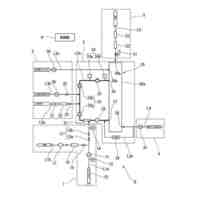
【選択図】図2
特許請求の範囲
【請求項1】
車両又は車両部品である試験対象を自動運転装置又は人である運転者が操作する台上試験に用いられる目標車速パターンデータをコンピュータによって生成する目標車速パターンデータ生成方法であって、
(A)原車速パターンデータを取得するステップと、
(B)少なくとも1つの運転指数に対する指定値を取得するステップと、
(C)前記指定値に基づいて前記原車速パターンデータを整形することによって修正車速パターンデータを生成するとともに、所定の条件を満たす前記修正車速パターンデータを前記目標車速パターンデータとして前記自動運転装置又は前記運転者による運転操作を補助する運転補助装置で読み込み可能な記憶媒体に記憶するステップと、を備え、
ステップ(C)は、
(C-1)前記原車速パターンデータのうち所定のカットオフ周波数より高周波数成分を整形することによって前記修正車速パターンデータを生成するステップと、
(C-2)前記原車速パターンデータを基準として前記修正車速パターンデータを評価することにより、前記修正車速パターンデータに対する前記運転指数の評価値を算出するステップと、
(C-3)前記指定値と前記評価値との差を所定の判定値未満にする前記修正車速パターンデータを前記目標車速パターンデータとして前記記憶媒体に記憶するステップと、を備えることを特徴とする目標車速パターンデータ生成方法。
続きを表示(約 1,100 文字)
【請求項2】
ステップ(C-1)では、前記原車速パターンデータから前記高周波数成分を抽出し、当該高周波数成分に所定の第1ゲインを乗じた値を前記原車速パターンデータに加えることによって前記修正車速パターンデータを生成し、
ステップ(C-3)では、前記カットオフ周波数及び前記第1ゲインの値を変化させながらステップ(C-1)及び(C-2)を繰り返し実行することによって前記指定値と前記評価値との差を前記判定値未満にする前記修正車速パターンデータを探索することを特徴とする請求項1に記載の目標車速パターンデータ生成方法。
【請求項3】
ステップ(C-1)では、前記高周波数成分に前記第1ゲインを乗じた値を前記原車速パターンデータに加えることによって生成される車速パターンデータに対し所定の第2ゲインを乗算することによって前記修正車速パターンデータを生成し、
ステップ(C-3)では、前記カットオフ周波数、前記第1ゲイン、及び前記第2ゲインの値を変化させながらステップ(C-1)及び(C-2)を繰り返し実行することによって前記指定値と前記評価値との差を前記判定値未満にする前記修正車速パターンデータを探索することを特徴とする請求項2に記載の目標車速パターンデータ生成方法。
【請求項4】
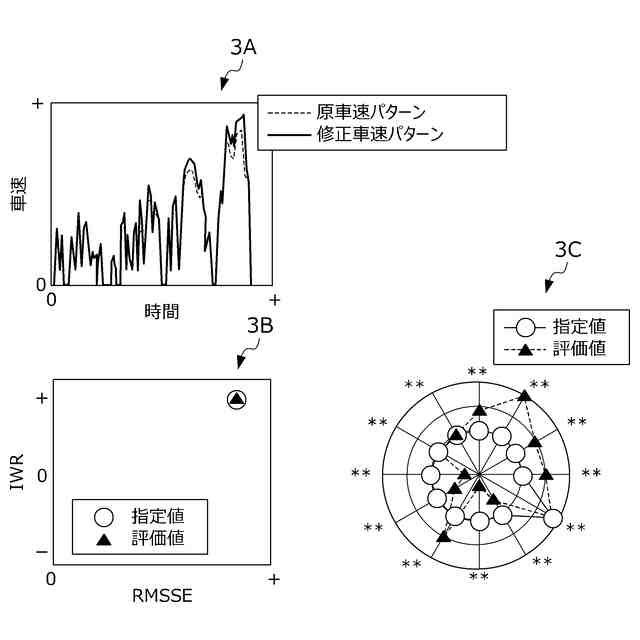
ステップ(B)では、仕事量に関する第1運転指数及び車速追従性に関する第2運転指数の少なくとも何れかに対する指定値を取得することを特徴とする請求項3に記載の目標車速パターンデータ生成方法。
【請求項5】
請求項1から4の何れかに記載の目標車速パターンデータ生成方法によって生成された前記目標車速パターンデータと前記自動運転装置とを利用して前記試験対象に対する前記台上試験を行う試験方法であって、
(D)前記自動運転装置が前記記憶媒体に記憶された前記目標車速パターンデータを読み込むステップと、
(E)前記自動運転装置が前記目標車速パターンデータに従って前記試験対象を操作するステップと、を備えることを特徴とする試験方法。
【請求項6】
請求項1から4の何れかに記載の目標車速パターンデータ生成方法によって生成された前記目標車速パターンデータと前記運転補助装置とを利用して前記試験対象に対する前記台上試験を行う試験方法であって、
(F)前記運転補助装置が前記記憶媒体に記憶された前記目標車速パターンデータを読み込むステップと、
(G)前記運転補助装置が前記運転者から視認可能な位置に設けられたモニターに前記目標車速パターンデータに基づいて生成した運転補助情報を表示し、前記運転者による前記目標車速パターンデータに従った前記試験対象の操作を促すステップと、を備えることを特徴とする試験方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、目標車速パターンデータ生成方法及び試験方法に関する。より詳しくは、試験対象を自動運転装置で操作する台上試験に用いられる目標車速パターンデータを生成する目標車速パターンデータ生成方法及びこの目標車速パターンデータを利用した試験方法に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
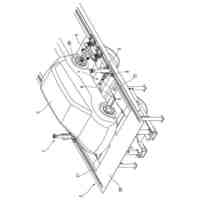
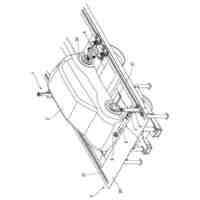
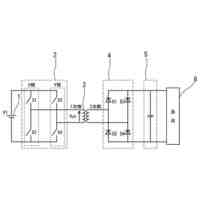
耐久試験、排気浄化性能評価試験、燃費計測試験、及びOBD(On-Board Diagnostics)試験等の台上試験は、例えばシャシダイナモメータのローラ上に実車両を実際に走行させることによって行われる。車両の開発段階では、実車両の運転は、人に代わって自動運転装置が行う場合がある(例えば、特許文献1参照)。自動運転装置は、WLTPやJC08等の各国の法規によって定められた車速パターンデータに従って様々なアクチュエータを駆動することにより、車両のアクセルペダル、ブレーキペダル及びシフトレバー等を操作する。
【先行技術文献】
【特許文献】
【0003】
特開平9-113418号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで車両や車両部品等の製品の開発では、運転性能の調整、製品の問題点の洗い出し、及び実際の市場でのユーザによる運転の再現等を目的として、自動運転装置によって幅広い運転態様を再現させたい、という要望がある。しかしながら上述のような台上試験に用いられる自動運転装置は、基本的には指令に高精度に追従することを目的として構築されている。このため車速パターンデータが法規によって定められている場合、従来の自動運転装置では、幅広い運転態様を再現することは困難である。
【0005】
なお、以上のように自動運転装置が実車両を運転する場合だけでなく、人である運転者が実車両を運転する場合も同様の課題が生じる。すなわち、熟練した運転者であれば、ある程度は運転の巧拙を実車両の運転に反映させることができるものの、このような運転の巧拙を客観的に評価できるように数値化したり、繰り返し精度良く再現したりすることは困難である。
【0006】
本発明は、自動運転装置又は人によって幅広い運転態様を再現できる目標車速パターンデータを生成する目標車速パターンデータ生成方法及び試験方法を提供することを目的とする。
【課題を解決するための手段】
【0007】
(1)本発明に係る目標車速パターンデータ生成方法は、車両又は車両部品である試験対象を自動運転装置又は人である運転者が操作する台上試験に用いられる目標車速パターンデータをコンピュータによって生成する方法であって、(A)原車速パターンデータを取得するステップと、(B)少なくとも1つの運転指数に対する指定値を取得するステップと、(C)前記指定値に基づいて前記原車速パターンデータを整形することによって修正車速パターンデータを生成するとともに、所定の条件を満たす前記修正車速パターンデータを前記目標車速パターンデータとして前記自動運転装置又は前記運転者による運転操作を補助する運転補助装置で読み込み可能な記憶媒体に記憶するステップと、を備え、ステップ(C)は、(C-1)前記原車速パターンデータのうち所定のカットオフ周波数より高周波数成分を整形することによって前記修正車速パターンデータを生成するステップと、(C-2)前記原車速パターンデータを基準として前記修正車速パターンデータを評価することにより、前記修正車速パターンデータに対する前記運転指数の評価値を算出するステップと、(C-3)前記指定値と前記評価値との差を所定の判定値未満にする前記修正車速パターンデータを前記目標車速パターンデータとして前記記憶媒体に記憶するステップと、を備えることを特徴とする。
【0008】
(2)この場合、ステップ(C-1)では、前記原車速パターンデータから前記高周波数成分を抽出し、当該高周波数成分に所定の第1ゲインを乗じた値を前記原車速パターンデータに加えることによって前記修正車速パターンデータを生成し、ステップ(C-3)では、前記カットオフ周波数及び前記第1ゲインの値を変化させながらステップ(C-1)及び(C-2)を繰り返し実行することによって前記指定値と前記評価値との差を前記判定値未満にする前記修正車速パターンデータを探索することが好ましい。
【0009】
(3)この場合、ステップ(C-1)では、前記高周波数成分に前記第1ゲインを乗じた値を前記原車速パターンデータに加えることによって生成される車速パターンデータに対し所定の第2ゲインを乗算することによって前記修正車速パターンデータを生成し、ステップ(C-3)では、前記カットオフ周波数、前記第1ゲイン、及び前記第2ゲインの値を変化させながらステップ(C-1)及び(C-2)を繰り返し実行することによって前記指定値と前記評価値との差を前記判定値未満にする前記修正車速パターンデータを探索することが好ましい。
【0010】
(4)この場合、ステップ(B)では、仕事量に関する第1運転指数及び車速追従性に関する第2運転指数の少なくとも何れかに対する指定値を取得することが好ましい。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社明電舎
回転機
1か月前
株式会社明電舎
成膜装置
23日前
株式会社明電舎
回転電機
1か月前
株式会社明電舎
ドローン
1か月前
株式会社明電舎
負荷制御装置
22日前
株式会社明電舎
負荷制御装置
22日前
株式会社明電舎
負荷制御装置
22日前
株式会社明電舎
車両固定装置
1か月前
株式会社明電舎
車両固定装置
1か月前
株式会社明電舎
センサ固定用治具
1か月前
株式会社明電舎
電力系統システム
1か月前
株式会社明電舎
ロータ及び回転機
1か月前
株式会社明電舎
電流制御システム
1か月前
株式会社明電舎
オゾン水の生成装置
1か月前
株式会社明電舎
オゾン水の生成装置
1か月前
株式会社明電舎
オゾン水の生成装置
1か月前
株式会社明電舎
遮断器のリンク機構、遮断器
1か月前
株式会社明電舎
不良検知装置及び不良検知方法
1か月前
株式会社明電舎
半導体モジュールおよび電力変換装置
1か月前
株式会社明電舎
ロータ、回転電機及び車両駆動用装置
1か月前
株式会社明電舎
水冷式回転機のフレーム、及びその製造方法
1か月前
株式会社明電舎
目標車速パターンデータ生成方法及び試験方法
1か月前
株式会社明電舎
電力変換装置および電力変換装置のゲート指令生成方法
1か月前
株式会社明電舎
出力調整機構、電界放射装置及び電界放射装置の出力制御方法
1か月前
株式会社明電舎
絶縁型DC/DC変換器および絶縁型DC/DC変換器の制御方法
1か月前
国立大学法人長岡技術科学大学
グリッドフォーミングインバータの制御装置および制御方法
1か月前
日本精機株式会社
検出装置
14日前
個人
採尿及び採便具
20日前
個人
高精度同時多点測定装置
1か月前
個人
アクセサリー型テスター
1か月前
個人
計量機能付き容器
9日前
株式会社ミツトヨ
測定器
26日前
甲神電機株式会社
電流検出装置
14日前
アズビル株式会社
電磁流量計
29日前
大成建設株式会社
風洞実験装置
9日前
個人
非接触による電磁パルスの測定方法
12日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ