TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025142828
公報種別
公開特許公報(A)
公開日
2025-10-01
出願番号
2024042409
出願日
2024-03-18
発明の名称
ロボットの操作装置
出願人
株式会社デンソーウェーブ
代理人
弁理士法人サトー
主分類
B25J
9/22 20060101AFI20250924BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】通常時にロボットを即座に停止させることができるロボットの操作装置を提供する。
【解決手段】実施形態による操作装置1は、表示部13と、表示部13に表示される通常停止スイッチ15と、通常停止スイッチ15が操作されたとき、ソフトウェアの処理に基づいてロボット2を停止させる停止処理を実行する停止処理部23と、付与された権限に応じた機能を実行可能なログイン状態と少なくとも一部の機能が制限されるログアウト状態とを切り替える処理を実行するログイン処理部24と、通常停止スイッチ15を有効または無効にする処理を実行するスイッチ処理部25と、を備えている。そして、スイッチ処理部25は、ログイン状態およびログアウト状態の双方において通常停止スイッチ15を有効にする。
【選択図】図1
特許請求の範囲
【請求項1】
表示部と、
前記表示部に表示される通常停止スイッチと、
前記表示部に前記通常停止スイッチを表示する表示処理を実行する表示処理部と、
前記通常停止スイッチが操作されたとき、ソフトウェアの処理に基づいてロボットを停止させる停止処理を実行する停止処理部と、
付与された権限に応じた機能を実行可能なログイン状態と少なくとも一部の機能が制限されるログアウト状態とを切り替える処理を実行するログイン処理部と、
前記通常停止スイッチを有効または無効にする処理を実行するスイッチ処理部と、を備え、
前記スイッチ処理部は、ログイン状態およびログアウト状態の双方で前記通常停止スイッチを有効にするロボットの操作装置。
続きを表示(約 790 文字)
【請求項2】
前記スイッチ処理部は、ログイン状態およびログアウト状態の双方において、前記通常停止スイッチを前記表示部に表示する請求項1記載のロボットの操作装置。
【請求項3】
前記スイッチ処理部は、ログアウト状態では、ログイン状態とは異なる表示態様で前記通常停止スイッチを表示する請求項1記載のロボットの操作装置。
【請求項4】
前記スイッチ処理部は、ログアウト状態で予め設定されている操作が行われた場合、前記通常停止スイッチが操作されたと判定して前記停止処理を実行させる請求項1記載のロボットの操作装置。
【請求項5】
前記通常停止スイッチが操作されて停止処理が実行された後、複数の手順を含む所定の復帰操作が行われた場合に前記ロボットを復帰させる復帰処理を実行する復帰処理部を備える請求項1記載のロボットの操作装置。
【請求項6】
前記復帰処理部は、前記ロボットを復帰させる処理の実行後にログイン状態になった場合に、前記ロボットを動作させるプログラムの実行を許可する請求項5記載のロボットの操作装置。
【請求項7】
前記スイッチ処理部は、予め設定されている特定のアカウントからログアウトした場合、前記通常停止スイッチを無効にする請求項1記載のロボットの操作装置。
【請求項8】
前記スイッチ処理部は、予め設定されている特定の処理の実行中にログアウトした場合、前記通常停止スイッチを無効にする請求項1記載のロボットの操作装置。
【請求項9】
本体と、
前記本体に設けられ、操作されるとロボットが非常停止される非常停止スイッチと、を備え、
前記表示部は、前記本体に設けられている、または、前記本体とは別体で設けられている請求項1記載のロボットの操作装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、ロボットの操作装置に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
ロボットは、例えば教示装置などの操作装置を用いて操作することが可能であり、そのような操作装置には、例えば特許文献1に記載されているように非常停止スイッチやイネーブルスイッチが設けられている。
【先行技術文献】
【特許文献】
【0003】
特開2020-110873号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来のスイッチはいわゆる非常時を想定して設けられたものであり、例えば教示作業を行っているときのような通常時にロボットを即座に停止させるためのスイッチは設けられていなかった。そのため、従来では、通常時にロボットを停止させるためには実行中のプログラムを停止する操作を行う必要があり、ロボットを即座に停止させることができなかった。
【0005】
本開示は、上記した事情に鑑みてなされたものであり、その目的は、通常時にロボットを即座に停止させることができるロボットの操作装置を提供することにある。
【課題を解決するための手段】
【0006】
本開示の一態様によるロボットの操作装置は、表示部と、表示部に表示される通常停止スイッチと、表示部に通常停止スイッチを表示する表示処理を実行する表示処理部と、通常停止スイッチが操作されたとき、ソフトウェアの処理に基づいてロボットを停止させる停止処理を実行する停止処理部と、付与された権限に応じた機能を実行可能なログイン状態と少なくとも一部の機能が制限されるログアウト状態とを切り替える処理を実行するログイン処理部と、通常停止スイッチを有効または無効にする処理を実行するスイッチ処理部と、を備え、スイッチ処理部は、ログイン状態およびログアウト状態の双方で通常停止スイッチを有効にする。
【図面の簡単な説明】
【0007】
実施形態による操作装置の構成例を模式的に示す図
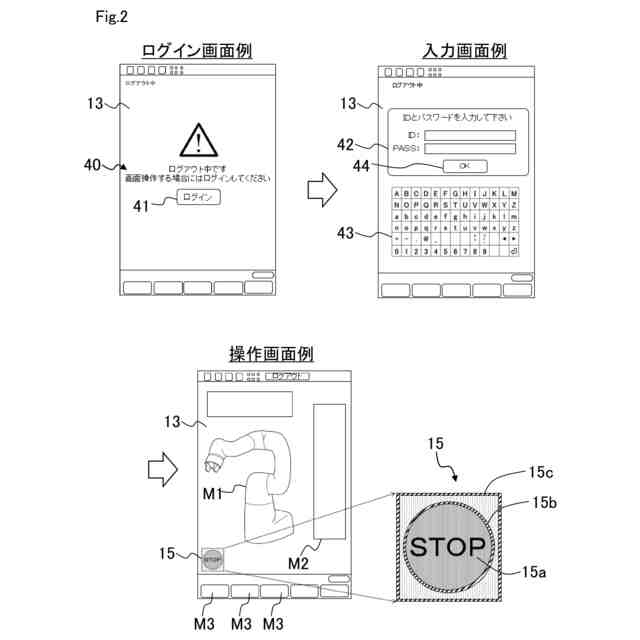
ログイン手順の一例を模式的に示す図
通常停止スイッチの有効または無効の設定例を示す図その1
通常停止スイッチの有効または無効の設定例を示す図その2
通常停止スイッチが有効な場合の画面例を模式的に示す図
通常停止スイッチが無効な場合の画面例を模式的に示す図
停止処理を実行させる操作態様を模式的に示す図
ログイン状態における復帰手順の一例を模式的に示す図
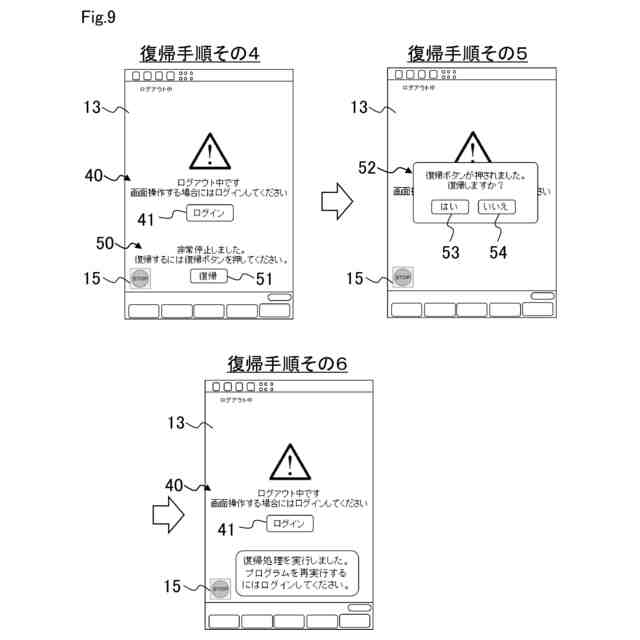
ログアウト状態における復帰手順の一例を模式的に示す図
操作装置の他の構成例を模式的に示す図
【発明を実施するための形態】
【0008】
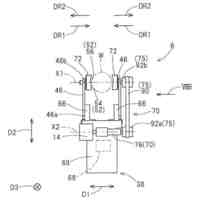
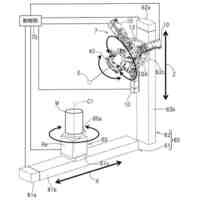
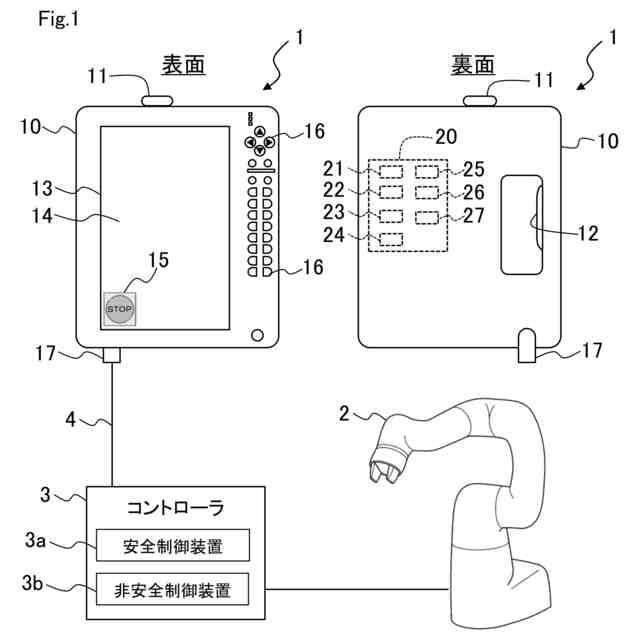
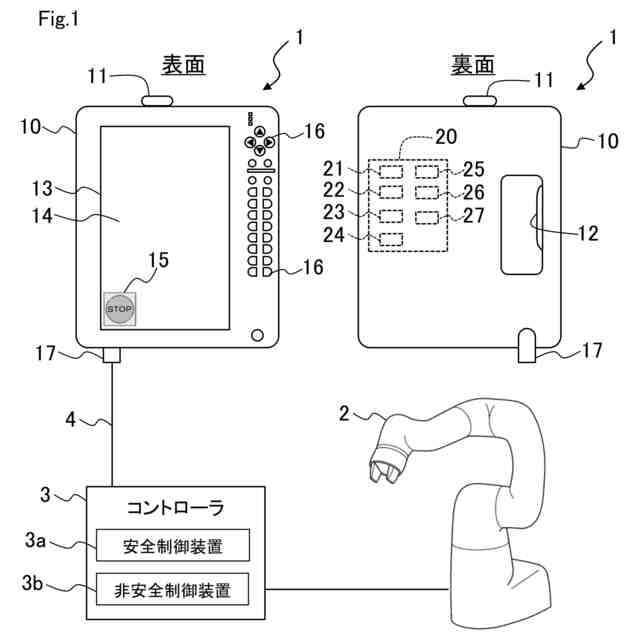
図1に示すように、本実施形態の操作装置1は、ロボット2に対する教示作業を行ういわゆる教示装置を想定しており、ロボット2を制御するコントローラ3との間が専用ケーブル4によって接続されている。ロボット2は、例えば垂直多関節型の6軸ロボットや7軸ロボット、水平多関節型のいわゆる4軸ロボットなどを想定している。
【0009】
コントローラ3は、一般的な構成であるため詳細な説明は省略するが、操作装置1からの設定や指示に基づいて制御指令を生成および出力するなど、ロボット2を制御する主体となる非安全系制御装置3a、および、例えば非常停止操作が入力されたときにロボット2への電力供給を遮断して停止させるなど安全に関する制御を行う主体となる安全系制御装置3bを備えている。
【0010】
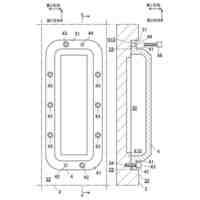
操作装置1は、本体10、本体10に設けられている非常停止スイッチ11、本体10の裏面側に設けられているイネーブルスイッチ12、表示部13、表示部13の画面に設けられているタッチパネル14、表示部13に表示されている通常停止スイッチ15、本体10の表面に設けられている複数のボタン類16、専用ケーブル4が繋がっているケーブル接続部17などを備えている。なお、操作装置1の構成は一例であり、各部の形状や大きさ、その数や配置などは図1に示すものに限定されない。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
フラワーホッチキス。
2日前
川崎重工業株式会社
ロボット
15日前
株式会社不二越
ロボット
14日前
株式会社竹中工務店
補助セット
14日前
川崎重工業株式会社
ハンド
6日前
株式会社不二越
移動ロボットシステム
17日前
工機ホールディングス株式会社
作業機
6日前
トヨタ自動車株式会社
ロボット
9日前
川崎重工業株式会社
塗装システム
6日前
本田技研工業株式会社
装置
20日前
株式会社不二越
エッジ仕上げ装置
27日前
株式会社不二越
垂直多関節ロボット
28日前
トヨタ自動車株式会社
軌道生成装置
9日前
工機ホールディングス株式会社
作業機
6日前
アネックスツール株式会社
ドライバービット
13日前
シンフォニアテクノロジー株式会社
搬送装置
17日前
ライオン株式会社
移載システム
29日前
ワールド技研株式会社
ロボットセル装置
14日前
株式会社マキタ
回転打撃工具
9日前
川崎重工業株式会社
ワーク搬送ロボット
6日前
セイコーエプソン株式会社
ロボット
13日前
山九株式会社
レンチ保持治具
9日前
NTN株式会社
ハンド
15日前
倉敷紡績株式会社
ハンドおよびコネクタ接続方法
27日前
トヨタ自動車株式会社
ロボットの制御装置
13日前
株式会社マキタ
電動工具
17日前
NTN株式会社
把持装置
15日前
NTN株式会社
把持装置
15日前
NTN株式会社
作業装置
13日前
川崎重工業株式会社
ロボット
13日前
株式会社マキタ
電動工具
17日前
東レエンジニアリング株式会社
ツール動作機構
8日前
川崎重工業株式会社
監視システム
7日前
アピュアン株式会社
衝撃工具用チゼル部材
17日前
本田技研工業株式会社
リンク機構
13日前
株式会社マキタ
インパクト工具
17日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ