TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025134485
公報種別
公開特許公報(A)
公開日
2025-09-17
出願番号
2024032420
出願日
2024-03-04
発明の名称
作業車両の走行経路生成システム
出願人
井関農機株式会社
代理人
主分類
A01B
69/00 20060101AFI20250909BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】適切な経路設定により安全かつ効率よく移動走行できる作業車両の走行経路作成システムを提供する。
【解決策】作業領域A内に予定作業経路R1を作成し、作成した予定作業経路R1上を作業走行するように制御する制御部150を備え、制御部150は予定作業経路R1とは別に作業を伴わない予定移動経路G1を作成し、予定移動経路G1は、作業領域A以外に到達した作業車両1の位置である移動開始地点P1と、任意に設定した目標地点P4とを結ぶ経路であり、作業領域Aと圃場外形F1の間に作成される枕地走行経路M2に沿って走行する枕地走行経路部G12と、移動開始地点P1と枕地走行経路部G12を繋ぐ移動開始経路部G11と、枕地走行経路部G12と目標地点P4を繋ぐ移動終了経路部G13を有し、枕地走行経路部G12は圃場外形F1の所定距離内側に作成される。
【選択図】図6
特許請求の範囲
【請求項1】
作業車両の位置を測定する測位装置を備え、
圃場外形を記憶し、
圃場外形に内包される作業領域を作成し、
作業領域内に予定作業経路を作成し、
作成した予定作業経路上を作業走行するように制御する制御部を備え、
制御部は予定作業経路とは別に作業を伴わない予定移動経路を作成し、
予定移動経路は、作業領域以外に到達した作業車両の位置である移動開始地点と、任意に設定した目標地点とを結ぶ経路であり、
作業領域と圃場外形の間に作成される枕地走行経路に沿って走行する枕地走行経路部と、
移動開始地点と枕地走行経路部を繋ぐ移動開始経路部と、
枕地走行経路部と目標地点を繋ぐ移動終了経路部を有し、
枕地走行経路部は圃場外形の所定距離内側に作成される
作業車両の走行経路作成システム。
続きを表示(約 340 文字)
【請求項2】
予定移動経路における旋回は所定の半径の旋回円が枕地走行経路と接する経路で作成され、
予定移動経路の候補を複数作成可能な場合は最短経路が予定移動経路として選択される
請求項1に記載の作業車両の走行経路作成システム。
【請求項3】
枕地走行経路は走行車体に装着される作業機の設定に基づいて作成され、
作業機にブロードキャスタが設定されると、予定移動経路の枕地走行経路部を最外周の枕地走行経路に沿って設定し、
作業機にブロードキャスタ以外が設定されると、予定移動経路の枕地走行経路部を最外周の枕地走行経路よりも内側に作成された枕地走行経路に沿って設定する
請求項1または2に記載の作業車両の走行経路作成システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、農業用トラクタ等の作業車両の走行経路作成システムに関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
圃場内を圃場の領域に沿って走行しながら測位装置の位置情報を記録することで圃場形状情報を作成し、安全センサ等の異常を検知すると作業走行を中断して設定された任意の待機場所に移動させる作業車両の自動運転システムが公知である(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特許7096531号
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、上記技術では設定された任意の待機場所に移動させるルートとして圃場の畦際に沿った内周を走行するものが開示されているが、畦際の走行は高い精度で制御しなければ畦と接触して畦および車両を損傷するおそれがあるうえ、畦を障害物として検知すると走行が停止してしまうため、自動運転させることが困難であった。
【0005】
そこで本発明は適切な経路設定により安全かつ効率よく移動走行できる作業車両の走行経路作成システムを提供することを目的とする。
【課題を解決するための手段】
【0006】
この発明は、上記課題を解決すべく次のような技術的手段を講じた。
【0007】
作業車両の位置を測定する測位装置を備え、圃場外形を記憶し、圃場外形に内包される作業領域を作成し、作業領域内に予定作業経路を作成し、作成した予定作業経路上を作業走行するように制御する制御部を備え、制御部は予定作業経路とは別に作業を伴わない予定移動経路を作成し、予定移動経路は、作業領域以外に到達した作業車両の位置である移動開始地点と、任意に設定した目標地点とを結ぶ経路であり、作業領域と圃場外形の間に作成される枕地走行経路に沿って走行する枕地走行経路部と、移動開始地点と枕地走行経路部を繋ぐ移動開始経路部と、枕地走行経路部と目標地点を繋ぐ移動終了経路部を有し、枕地走行経路部は圃場外形の所定距離内側に作成される。
【発明の効果】
【0008】
本発明によると、作業走行とは別に圃場内を移動する移動経路を適切に設定し、安全かつ効率よく移動走行できる。
【図面の簡単な説明】
【0009】
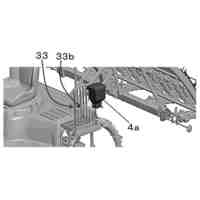
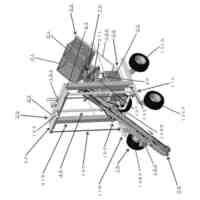
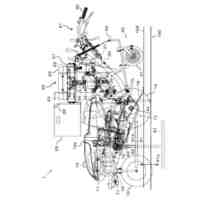
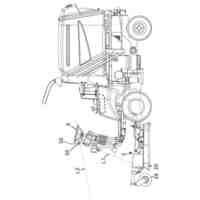
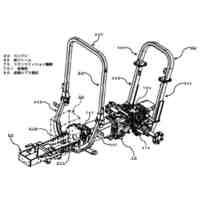
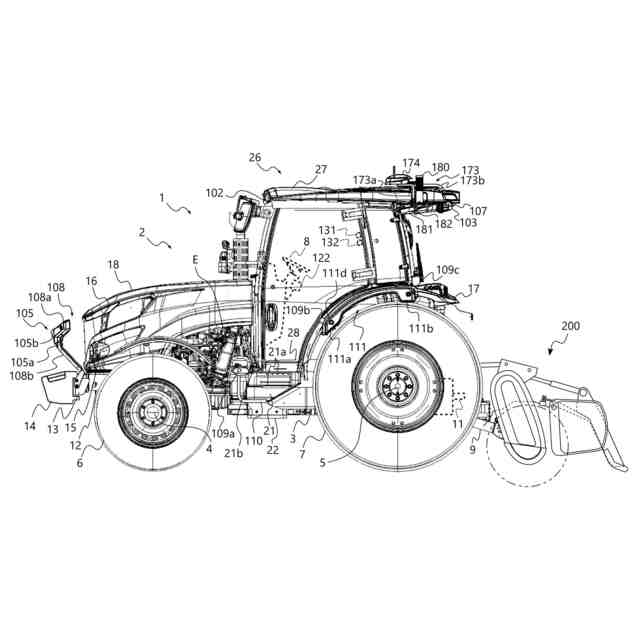
実施形態に係るトラクタの側面図である。
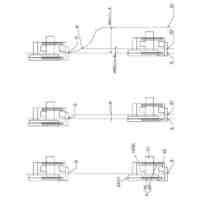
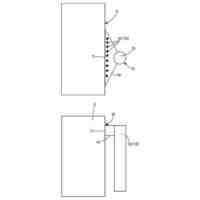
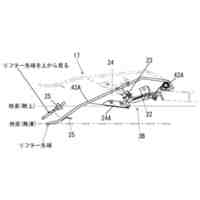
実施形態に係るセンサの検出範囲を表すトラクタ側面の簡略図である。
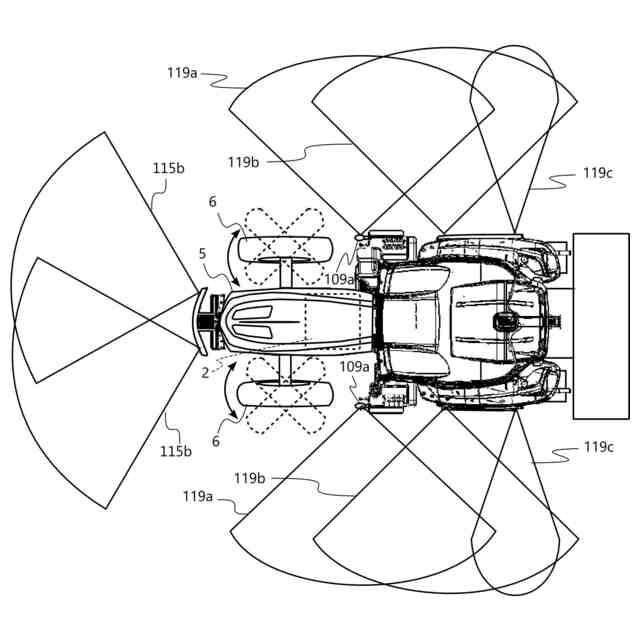
実施形態に係るセンサの検出範囲を表すトラクタ平面の簡略図である。
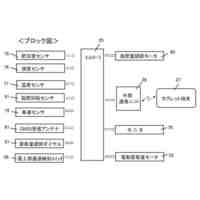
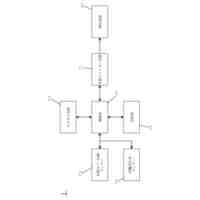
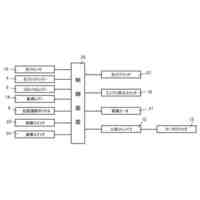
実施形態に係るトラクタの制御システムを示すブロック図である。
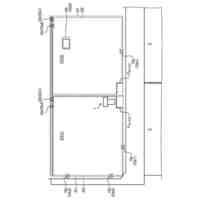
実施形態に係るトラクタの走行経路作成システムにおける予定作業経路作成の概要図である。
実施形態に係るトラクタの走行経路作成システムにおける予定移動経路作成の概要図である。
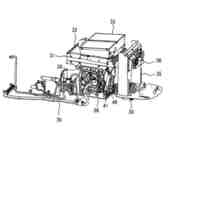
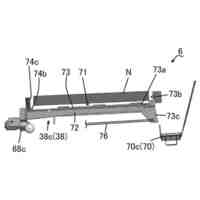
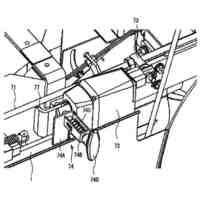
実施形態に係るブロードキャスタが装着されたトラクタの側面図である。
【発明を実施するための形態】
【0010】
本発明の作業車両についての実施例を図面に基づき説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
井関農機株式会社
田植機
23日前
井関農機株式会社
作業車両
2日前
井関農機株式会社
作業車両
15日前
井関農機株式会社
作業車両
22日前
井関農機株式会社
農作業機
22日前
井関農機株式会社
作業車両
17日前
井関農機株式会社
作業車両
16日前
井関農機株式会社
作業車両
16日前
井関農機株式会社
作業車両
3日前
井関農機株式会社
作業車両
16日前
井関農機株式会社
作業車両
15日前
井関農機株式会社
作業車両
24日前
井関農機株式会社
作業車両
4日前
井関農機株式会社
作業車両
4日前
井関農機株式会社
作業車両
9日前
井関農機株式会社
作業車両
8日前
井関農機株式会社
作業車両
3日前
井関農機株式会社
作業車両
3日前
井関農機株式会社
作業車両
4日前
井関農機株式会社
コンバイン
23日前
井関農機株式会社
乗用芝刈機
22日前
井関農機株式会社
コンバイン
10日前
井関農機株式会社
歩行型耕運機
16日前
井関農機株式会社
乗用型苗移植機
16日前
井関農機株式会社
汎用コンバイン
23日前
井関農機株式会社
穀稈の刈取作業方法
17日前
井関農機株式会社
電動式移植作業車両
16日前
井関農機株式会社
農産物の管理システム
16日前
国立大学法人神戸大学
コンバイン
22日前
井関農機株式会社
作業車両
11日前
井関農機株式会社
作業車両
22日前
井関農機株式会社
作業車両
8日前
井関農機株式会社
籾摺選別機
8日前
井関農機株式会社
籾摺選別機
8日前
個人
草刈り鋏
8日前
個人
蠅捕獲器
4日前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ