TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025125694
公報種別
公開特許公報(A)
公開日
2025-08-28
出願番号
2024021794
出願日
2024-02-16
発明の名称
ロボットシステム、ロボットハンド、位置検出方法、およびプログラム
出願人
グローリー株式会社
代理人
個人
主分類
B25J
13/08 20060101AFI20250821BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】パレット上に積載された対象物の空間位置を検出するにあたって、コストを抑制することが可能な技術を提供する。
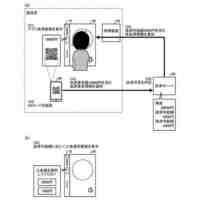
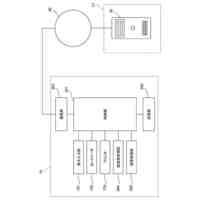
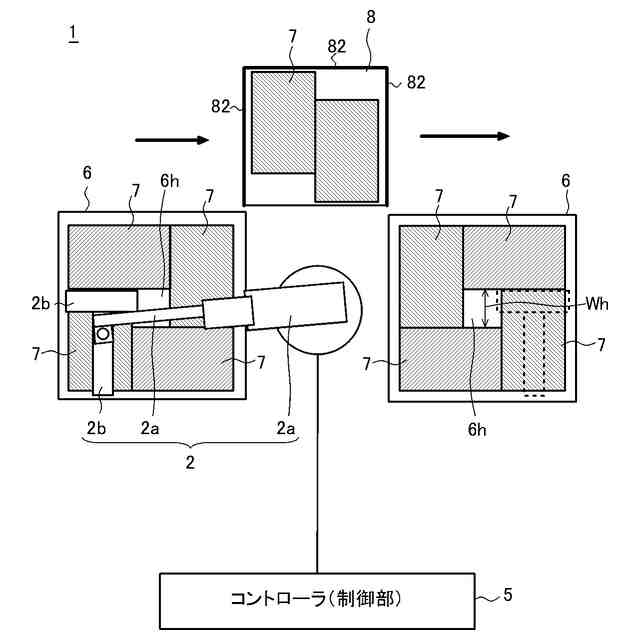
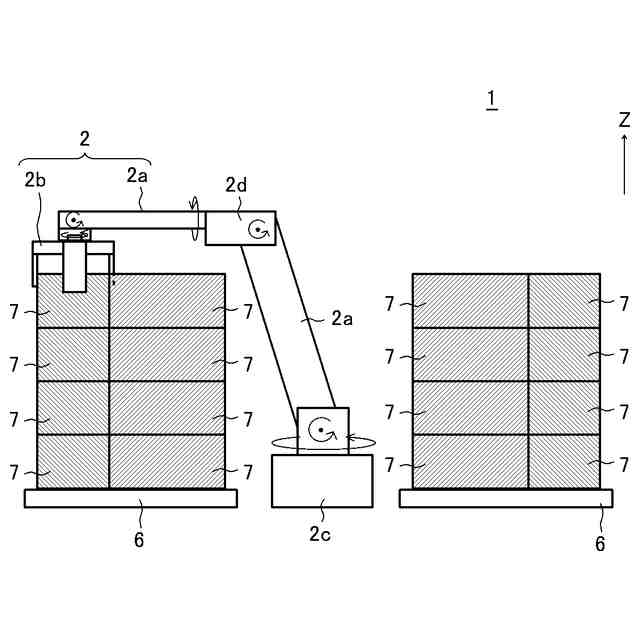
【解決手段】パレット6上に積載された対象物(コンテナ7等)をハンドリングするロボットシステム1は、ロボット2と、対象物の上面高さを検出する距離センサと、対象物の水平位置を検出する2次元カメラと、コントローラ5とを備える。コントローラ5は、距離センサおよび2次元カメラによって検出された上面高さおよび水平位置に基づき、空間内における対象物の位置を特定する。
【選択図】図1
特許請求の範囲
【請求項1】
パレット上に積載された対象物をハンドリングするロボットシステムであって、
前記対象物をハンドリングするロボットと、
前記対象物の上面高さを検出する距離センサと、
前記対象物の水平位置を検出する2次元カメラと、
制御手段と、
を備え、
前記制御手段は、検出された前記上面高さおよび前記水平位置に基づき、空間内における前記対象物の位置を特定することを特徴とするロボットシステム。
続きを表示(約 1,100 文字)
【請求項2】
前記距離センサは、前記ロボットに固定され、
前記2次元カメラは、前記ロボットに固定されることを特徴とする、請求項1に記載のロボットシステム。
【請求項3】
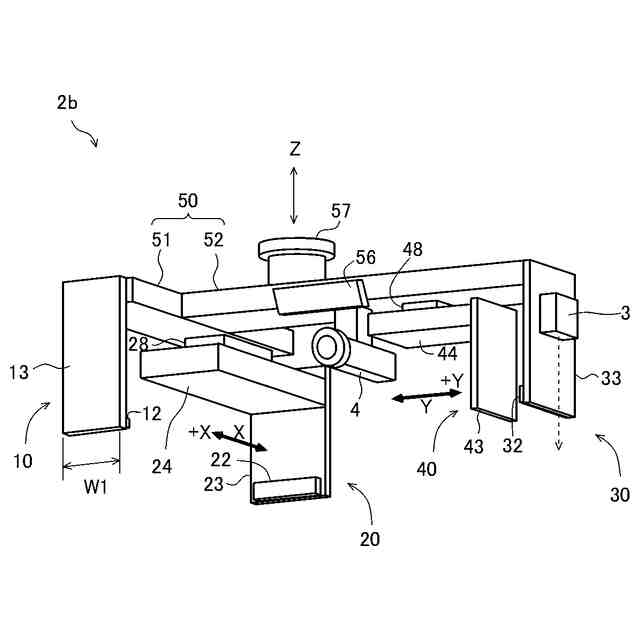
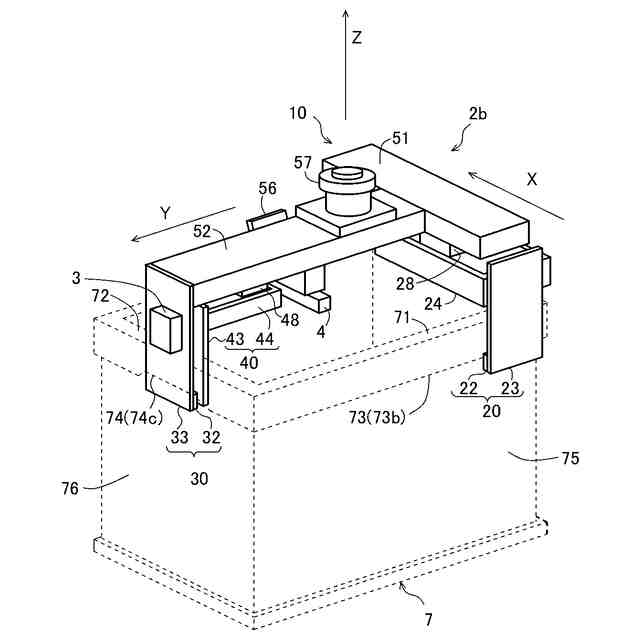
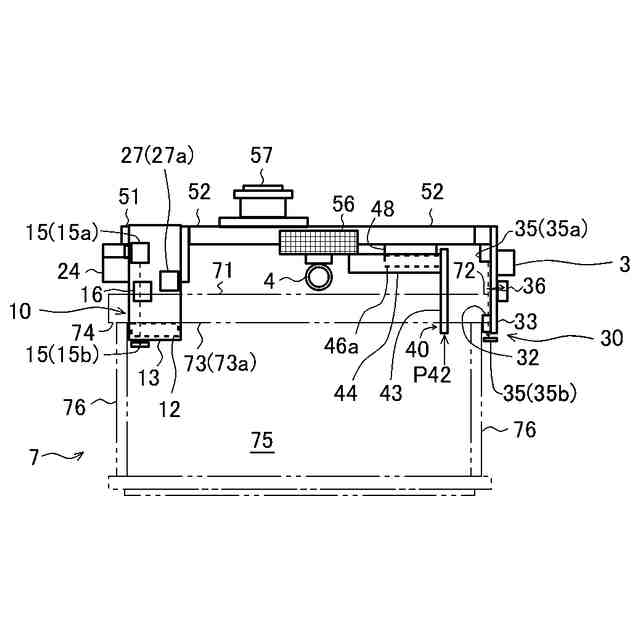
前記ロボットは、ロボットアームと前記ロボットアームの手先に装着されるロボットハンドとを備え、
前記距離センサは、前記ロボットハンドに固定され、
前記2次元カメラは、前記ロボットハンドに固定されることを特徴とする、請求項1に記載のロボットシステム。
【請求項4】
前記制御手段は、前記ロボットを駆動して前記距離センサの水平方向の位置を変更し、前記対象物の上面高さを異なる複数の水平位置にて検出することを特徴とする、請求項2に記載のロボットシステム。
【請求項5】
前記制御手段は、異なる複数の水平位置にて検出された前記上面高さに基づき、最上段における複数の対象物の積載方向を判定することを特徴とする、請求項4に記載のロボットシステム。
【請求項6】
前記パレット上において複数の対象物がピンホール積みされており、
前記制御手段は、異なる複数の水平位置にて検出された前記上面高さに基づき、最上段にてピンホール積みされた各対象物の方向を判定することを特徴とする、請求項4に記載のロボットシステム。
【請求項7】
前記対象物は、上面視において略長方形形状を有するとともに、特定色で着色された着色部を前記略長方形形状の4辺のうちの1辺に有しており、
前記制御手段は、前記2次元カメラの撮影画像に基づき前記対象物の前記1辺を特定することによって、水平方向における4つの向きのいずれを前記対象物が有しているかを判定することを特徴とする、請求項1に記載のロボットシステム。
【請求項8】
前記制御手段は、前記ロボットを駆動して、前記パレット上にて最も上側に存在する前記対象物の上面から鉛直方向に所定距離離れた位置に前記2次元カメラを移動させた状態で、当該2次元カメラを用いて前記対象物の画像を撮影することを特徴とする、請求項2に記載のロボットシステム。
【請求項9】
前記ロボットハンドは、前記ロボットアームの一の回転関節の駆動に応じて、鉛直軸周りに回転することが可能であることを特徴とする、請求項3に記載のロボットシステム。
【請求項10】
前記制御手段は、前記ロボットアームの一の回転関節の駆動に応じて、前記2次元カメラの光軸方向を水平方向から鉛直方向へと変更し且つ前記2次元カメラの鉛直方向位置を上方に移動した状態で、前記2次元カメラに前記対象物を撮影させることを特徴とする、請求項3に記載のロボットシステム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、パレット上に積載された対象物をロボットを用いてハンドリングするロボットシステム、及びそれに関連する技術に関する。
続きを表示(約 920 文字)
【背景技術】
【0002】
パレット上に積載された対象物の空間内における位置(空間位置)を検出する手法としては、3次元カメラを利用するものが存在する。
【0003】
たとえば、特許文献1には、3次元カメラを用いてパレット上に積載された対象物の空間位置(3次元位置)を3次元カメラを用いて取得する技術が記載されている。
【先行技術文献】
【特許文献】
【0004】
特開2022-25743号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、3次元カメラは高価である。そのため、コストを抑制できる技術が望まれる。
【0006】
そこで、この発明の課題は、パレット上に積載された対象物の空間位置を検出するにあたって、コストを抑制することが可能な技術を提供することにある。
【課題を解決するための手段】
【0007】
上記課題を解決すべく、本発明に係るロボットシステムは、パレット上に積載された対象物をハンドリングするロボットシステムであって、前記対象物をハンドリングするロボットと、前記対象物の上面高さを検出する距離センサと、前記対象物の水平位置を検出する2次元カメラと、制御手段と、を備え、前記制御手段は、検出された前記上面高さおよび前記水平位置に基づき、空間内における前記対象物の位置を特定することを特徴とする。
【0008】
前記距離センサは、前記ロボットに固定され、前記2次元カメラは、前記ロボットに固定されてもよい。
【0009】
前記ロボットは、ロボットアームと前記ロボットアームの手先に装着されるロボットハンドとを備え、前記距離センサは、前記ロボットハンドに固定され、前記2次元カメラは、前記ロボットハンドに固定されてもよい。
【0010】
前記制御手段は、前記ロボットを駆動して前記距離センサの水平方向の位置を変更し、前記対象物の上面高さを異なる複数の水平位置にて検出してもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
グローリー株式会社
貨幣処理装置及び貨幣情報出力方法
14日前
グローリー株式会社
遊技管理システム、各台装置及び遊技管理方法
今日
グローリー株式会社
情報管理システム、情報取得方法およびプログラム
1日前
グローリー株式会社
金融店舗システム、及び、金融店舗システムが行う方法
1日前
グローリー株式会社
収納システム、収納システムの制御方法およびプログラム
8日前
グローリー株式会社
紙葉類処理装置、紙葉類処理システムおよび紙葉類処理方法
今日
グローリー株式会社
不正検出装置、不正検出システム、不正検出方法及び不正検出プログラム
4日前
グローリー株式会社
検知装置およびプログラム
3日前
個人
固定補助具
1か月前
個人
折りたたみ工具
25日前
川崎重工業株式会社
ロボット
2日前
株式会社三協システム
製函機
23日前
株式会社三協システム
移載装置
22日前
株式会社不二越
ロボット
1日前
CKD株式会社
把持装置
24日前
株式会社竹中工務店
補助セット
1日前
株式会社不二越
ロボットシステム
1か月前
株式会社不二越
ロボット操作装置
1か月前
太陽パーツ株式会社
アシストスーツ
25日前
株式会社ミクロブ
把持装置
24日前
SMC株式会社
着脱装置
23日前
日本精工株式会社
締結用工具
1か月前
ARMA株式会社
ジョイントフレーム
1か月前
株式会社不二越
移動ロボットシステム
4日前
トヨタ自動車株式会社
カプラ接続治具
1か月前
株式会社不二越
エッジ仕上げ装置
14日前
本田技研工業株式会社
装置
7日前
株式会社不二越
ロボットシステム
22日前
株式会社不二越
ロボットシステム
25日前
株式会社不二越
垂直多関節ロボット
15日前
積水ハウス株式会社
フィルム除去具
1か月前
トヨタ自動車株式会社
歩行ロボット
28日前
株式会社不二越
協働ロボットシステム
2か月前
ライオン株式会社
移載システム
16日前
アネックスツール株式会社
ドライバービット
今日
ダイハツ工業株式会社
移載治具
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ