TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025122201
公報種別
公開特許公報(A)
公開日
2025-08-20
出願番号
2025091612,2021142911
出願日
2025-06-02,2021-09-02
発明の名称
荷役助力装置
出願人
ユニパルス株式会社
代理人
主分類
B66D
3/18 20060101AFI20250813BHJP(巻上装置;揚重装置;牽引装置)
要約
【課題】操作性の改善を図った荷役助力装置を提供する。
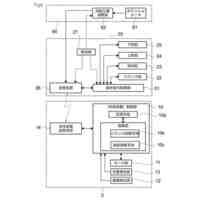
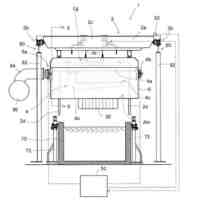
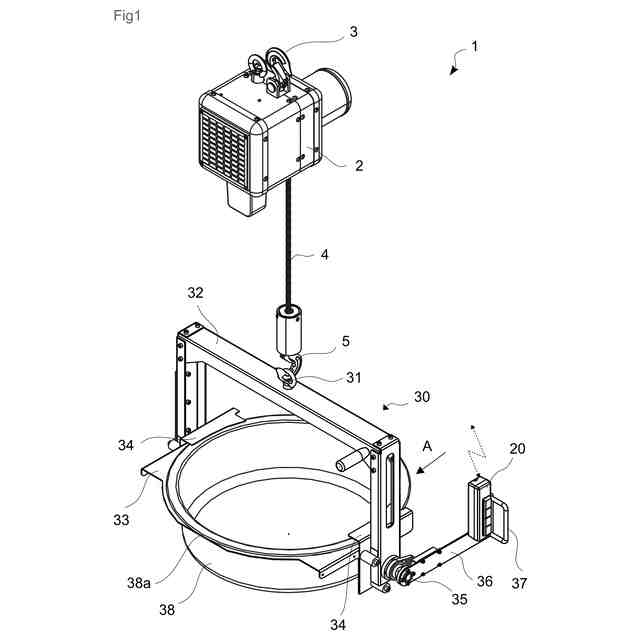
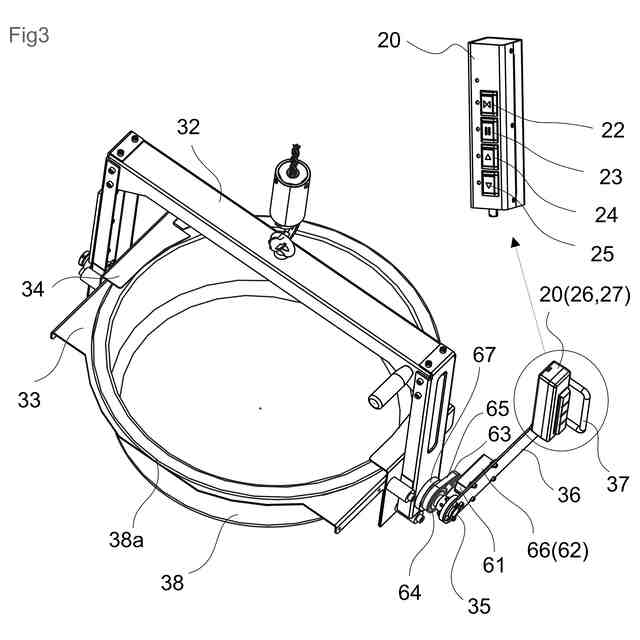
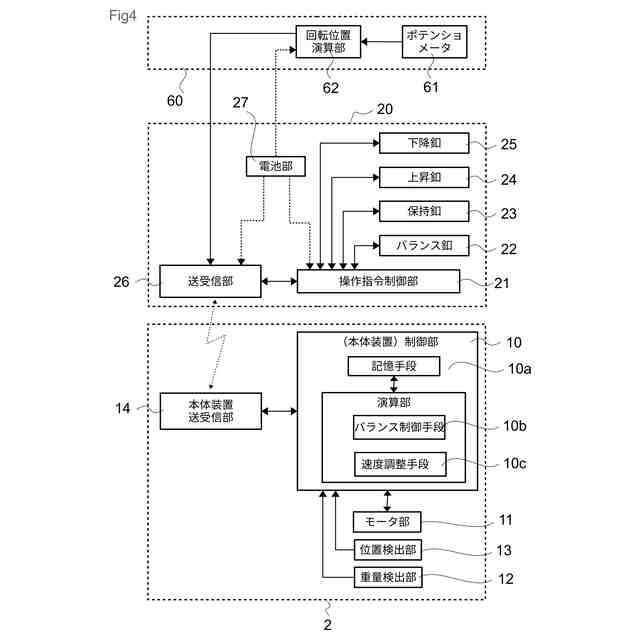
【解決手段】荷役助力装置であって、係止部は容器を傾斜可能に係止し、昇降作動部はスリングを介して係止部を昇降させ、モータ部11は昇降作動部を駆動し、重量検出部12は昇降作動部に加わる重量値を送信し、位置検出部13は昇降の位置値を送信し、操作指令部20は操作指令を送信し、制御部10はバランス制御の指令を受信した場合、重量値を受信して登録値として記憶する記憶手段10aと、昇降作動部からの重量値を登録値に等しくする加速度を含む制御値を演算してモータ部11へ指令を行うバランス制御手段10bとを含む。
【選択図】図4
特許請求の範囲
【請求項1】
荷役物を有する吊り具の係止が可能な係止部が一端側に設けられるスリングと、
他端側の前記スリングを巻き上げする若しくは繰出す動作を可能にして、前記係止部と共に前記荷役物を昇降できるようにする昇降作動部と、
前記荷役物が昇降したときの位置値を出力する位置検出部と、
前記昇降作動部を駆動させる動力源として、前記位置値に応じた前記スリングの繰り出し長さに駆動させ得るモータ部と、
前記昇降時の前記スリングを介して前記昇降作動部に加わる重量を検出し、当該検出に基づいて重量値を出力する重量検出部と、
前記スリングの動作に基づいて前記荷役物が宙吊りとされたときの前記重量値を登録値として記憶できるようにし、前記モータ部の指令に関する制御値を求めて前記昇降作動部の駆動制御を可能にする制御部と、
前記制御部と遠隔関係にある所定の操作指令手段からの出力指定として、少なくともバランス指令に関する受信を可能にする受信部と、
を備える荷役助力装置であって、
前記制御部は、
前記バランス指令を受信する場合に、前記重量検出部が出力する前記重量値を、前記登録値に等しくさせ得る前記制御値を求める演算をし、前記駆動制御に基づいて前記荷役物を昇降する速度を定めつつ助力を行うバランス状態にするバランス制御手段を有し、
前記バランス制御手段は、
前記スリングに鉛直下向きの外力を加える作業に係る操作が行われる場合に、当該外力により大きくなる所定の前記重量値を前記登録値に近づけさせる前記制御値を求め得る前記演算にし、当該スリングを下向きに応じた加速度にして繰り出させる前記駆動制御にし、
前記スリングに鉛直上向きの外力を加える作業に係る操作が行われる場合に、当該外力により小さくなる所定の前記重量値を前記登録値に近づけさせる前記制御値を求め得る前記演算にし、当該スリングを上向きに応じた加速度にして巻き上げる前記駆動制御にする、
ことを特徴とする荷役助力装置。
続きを表示(約 390 文字)
【請求項2】
前記バランス制御手段は、
前記バランス状態中に前記外力を加える操作が止められ、前記重量値が前記登録値と等しくなったときの前記位置値に応じた前記スリングの繰り出し長さで、前記荷役物が静止するような状態とさせる前記駆動制御にする、
ことを特徴とする請求項1に記載の荷役助力装置。
【請求項3】
前記バランス制御手段は、
前記操作指令手段から前記バランス指令を受信するに基づいて、当該受信後の出力となる所定の前記重量値が前記登録値に等しくないとき、
当該登録値に応じた重量で生じる前記スリングのテンションと、当該所定の前記重量値に応じた重量で生じる前記スリングのテンションと、を同じにさせるためとして、前記加速度の情報を含む前記制御値を求める前記演算を可能にする、
ことを特徴とする請求項1に記載の荷役助力装置。
発明の詳細な説明
【技術分野】
【0001】
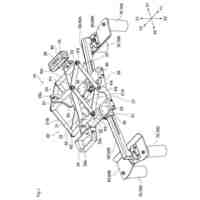
本発明は、製造分野の製造組立てや搬送などに用いる荷役助力装置であって、例えば荷役物を昇降させる際にモータによる助力を行い僅かな操作力で上下移動させる荷役助力装置及び荷役助力装置の制御方法に関するものである。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
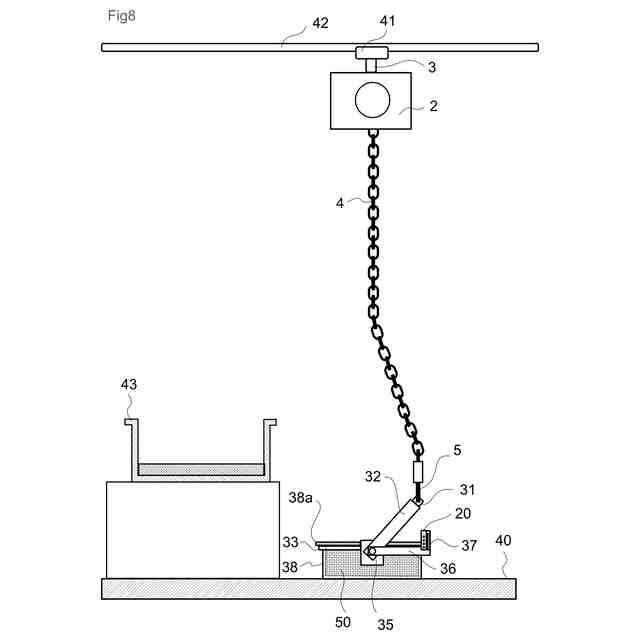
従来から工業製品の組立てを行う工場では、大きな重量を有する工具、作業用機器、製品、半完成品などを移動させる荷役装置を使用している。その荷役装置の中でも、大きな重量の荷役物に対して、使用者が軽い操作力で任意の高さに昇降移動できるように助力を発生させる荷役助力装置が一部で使用されている。このように助力を発生させる荷役助力装置は、モータによって助力を行い、荷役物に小さな操作力を加えることで荷役物をスムーズに移動させることができる。したがって単に上下動作を操作釦によって電動モータで行うものとは異なり、荷役物の荷重やこれに加わる操作力を例えば荷重検出器で検出して、回転角検出器と繋がったACサーボモータ等で外力の印加による重量変化を元に加速度を調整して細かい制御を行うように構成されている。このような荷役助力装置を使用して、液体や粉体を入れた容器を宙吊りとしてその重量値を登録しておけば、この重量値に基づいてモータによる助力を行って、作業者が容器を傾斜させて被注入容器等に移し替える作業を行うことができる。
【先行技術文献】
【特許文献】
【0003】
特開2019-52007号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
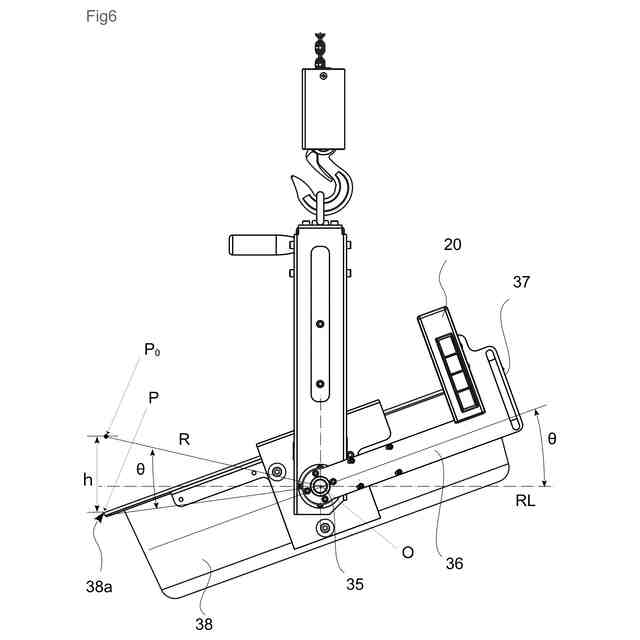
特許文献1には、荷役助力装置に関する技術が開示されている。このような荷役助力装置を使用して、液体や粉体を入れた容器を宙吊りとしてその重量値を登録しておき、この重量値に基づいてモータによって助力を行いつつ、作業者は容器を傾けて被注入設備等に移し替える作業を行うことができる。しかしながら容器の傾き角度と液体や粉体の残量によって高さが変わってしまうことから改善の余地があった。
【0005】
このような問題に鑑みて、本発明は荷役作業において、操作性の改善を図った荷役助力装置
または
荷役助力装置の制御方法の提供を目的としている。
【課題を解決するための手段】
【0006】
本発明の一態様に係る荷役助力装置は、上記の目的を達成するために、
荷役物を有する吊り具の係止が可能な係止部が一端側に設けられるスリングと、
他端側のスリングを巻き上げする若しくは繰出す動作を可能にして、係止部と共に荷役物を昇降できるようにする昇降作動部と、
荷役物が昇降したときの位置値を出力する位置検出部と、
昇降作動部を駆動させる動力源として、位置値に応じたスリングの繰り出し長さに駆動させ得るモータ部と、
昇降時のスリングを介して昇降作動部に加わる重量を検出し、当該検出に基づいて重量値を出力する重量検出部と、
スリングの動作に基づいて荷役物が宙吊りとされたときの重量値を登録値として記憶できるようにし、モータ部の指令に関する制御値を求めて昇降作動部の駆動制御を可能にする制御部と、
制御部と遠隔関係にある所定の操作指令手段からの出力指定として、少なくともバランス指令に関する受信を可能にする受信部と、
を備える荷役助力装置であって、
上記制御部は、
バランス指令を受信する場合に、重量検出部が出力する重量値を、登録値に等しくさせ得る制御値を求める演算をし、上記駆動制御に基づいて荷役物を昇降する速度を定めつつ助力を行うバランス状態にするバランス制御手段を有し、
上記バランス制御手段は、
スリングに鉛直下向きの外力を加える作業に係る操作が行われる場合に、当該外力により大きくなる所定の重量値を登録値に近づけさせる制御値を求め得る演算にし、当該スリングを下向きに応じた加速度にして繰り出させる上記駆動制御にし、
スリングに鉛直上向きの外力を加える作業に係る操作が行われる場合に、当該外力により小さくなる所定の重量値を登録値に近づけさせる制御値を求め得る演算にし、当該スリングを上向きに応じた加速度にして巻き上げる上記駆動制御にする、構成とされている。
【0007】
本発明の一態様に係る荷役助力装置は、上記の目的を達成するために、
上記バランス制御手段は、
バランス状態中に外力を加える操作が止められ、重量値が登録値と等しくなったときの位置値に応じたスリングの繰り出し長さで、荷役物が静止するような状態とさせる上記駆動制御にする、構成とされている。
【0008】
本発明の一態様に係る荷役助力装置の制御方法は、上記の目的を達成するために、
上記バランス制御手段は、
操作指令手段からバランス指令を受信するに基づいて、当該受信後の出力となる所定の重量値が登録値に等しくないとき、
当該登録値に応じた重量で生じるスリングのテンションと、当該所定の重量値に応じた重量で生じるスリングのテンションと、を同じにさせるためとして、加速度の情報を含む制御値を求める演算を可能にする、構成とされている。
【発明の効果】
【0009】
本発明の荷役助力装置によれば、荷役物の移動を助力して行う荷役の作業に関して、操作性の改善を図った荷役助力装置の提供ができる。
【0010】
また
本発明の荷役助力装置によれば、液体や粉体の荷役物を入れた容器を移動して荷役物を他の容器等に載せ替えする作業において、作業位置が保たれ良好な操作性を提供する荷役助力装置を提供できる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
ユニパルス株式会社
力変換器
19日前
ユニパルス株式会社
荷役助力装置
7日前
個人
自走手摺
1か月前
個人
懸吊装置
11か月前
ユニパルス株式会社
吊具
2か月前
個人
海上コンテナ昇降装置
8か月前
ユニパルス株式会社
吊具装置
9か月前
ユニパルス株式会社
荷役装置
7か月前
水戸工業株式会社
吊り具
4か月前
ユニパルス株式会社
リフト装置
3か月前
株式会社いうら
車椅子用昇降機
28日前
株式会社豊田自動織機
荷役車両
7か月前
株式会社豊田自動織機
荷役車両
8か月前
株式会社豊田自動織機
産業車両
9か月前
愛知製鋼株式会社
受け架台
5日前
株式会社伊藤
滑り止め装置
23日前
白山工業株式会社
バランサ
5か月前
ユニパルス株式会社
荷役助力装置
4か月前
ユニパルス株式会社
荷役助力装置
2か月前
ユニパルス株式会社
荷役助力装置
1か月前
大栄産業株式会社
クランプ
3か月前
株式会社ユピテル
システム等
4か月前
株式会社キトー
タイヤ用吊具
3か月前
個人
建築部材の吊り上げ装置
10か月前
株式会社豊田自動織機
フォークリフト
6か月前
フジテック株式会社
エレベータ
7か月前
株式会社大林組
養生方法
11か月前
大和ハウス工業株式会社
吊上具
14日前
新英運輸株式会社
自動車用台車
3か月前
株式会社五十鈴製作所
搬送装置
2か月前
株式会社キトー
吊具
11か月前
株式会社タダノ
高所作業車
10か月前
白山工業株式会社
腕重量補償機構
10か月前
フジテック株式会社
エスカレータ
4か月前
有限会社サエキ
玉掛用器具
8か月前
中坪造園有限会社
吊り荷降ろし具
3か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ