TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025104226
公報種別
公開特許公報(A)
公開日
2025-07-09
出願番号
2024147987
出願日
2024-08-29
発明の名称
水上ボートのBLDCモーター遠隔制御システム及び方法
出願人
グローバルコリア,リミテッド
代理人
個人
,
個人
主分類
B63H
25/02 20060101AFI20250702BHJP(船舶またはその他の水上浮揚構造物;関連艤装品)
要約
【課題】ユーザーの操作に基づき、ボートを遠隔で操縦するシステムを通じて精密で且つ迅速な反応性を提供することで、ボート操縦の正確度と効率性を大幅に向上させる装置を提供する。
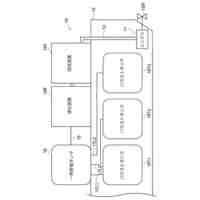
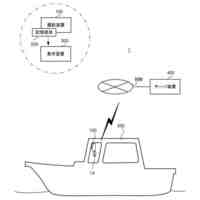
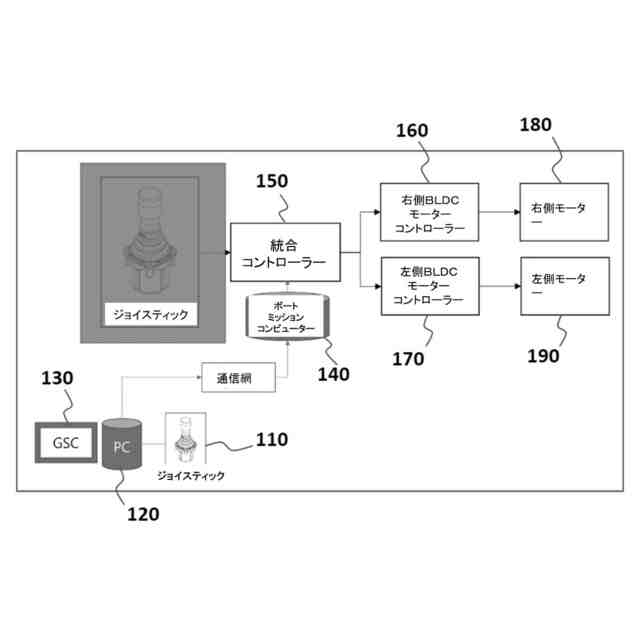
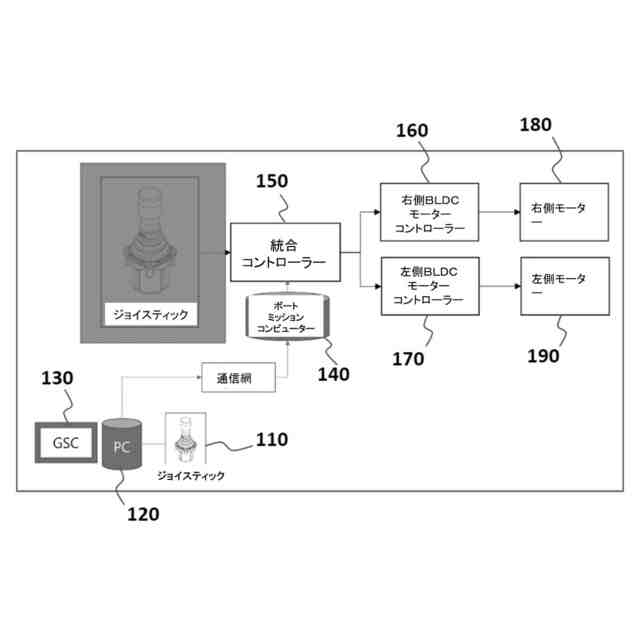
【解決手段】ユーザーの操作情報を電圧信号に変換するジョイスティックモジュールと、ジョイスティックモジュールから受けた信号を処理し、ボートの状態情報を受信してモニタリングする役割を果たすPCモジュールと、遠隔制御信号およびボートの状態情報を双方向に中継する水上用統合GSCと、水上用統合GSCから伝達された遠隔制御信号を統合コントローラーに伝達するボートミッションコンピューターと、ボートミッションコンピューターから受けた操作情報に基づいてモーターの速度と方向を調整する統合コントローラーと、ボートの動きと方向を調整する右側BLDCモーターコントローラー及び左側BLDCモーターコントローラーと、を含む。
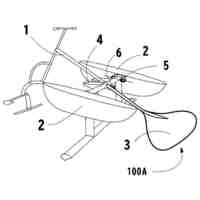
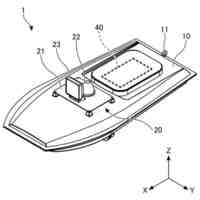
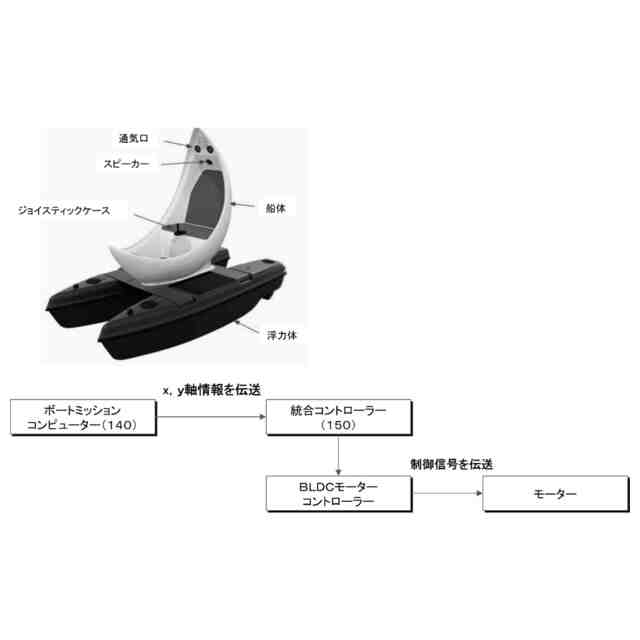
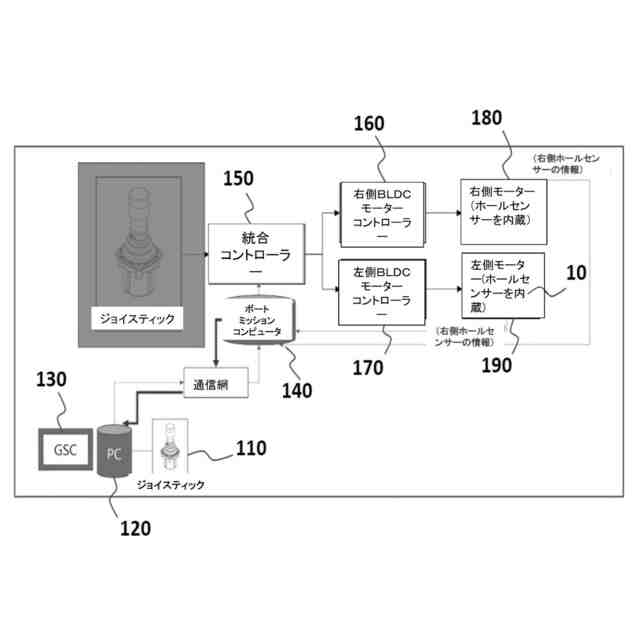
【選択図】図2
特許請求の範囲
【請求項1】
ユーザーの操作情報を電圧信号に変換する装置であって、x、y軸方向の操作による360度方向別の電圧信号を出力してPCモジュールに伝送するジョイスティックモジュールと、
前記ジョイスティックモジュールから受けた信号を処理し、これを遠隔操縦命令で水上用統合GSCを通じてボートに伝送し、ボートの状態情報を受信してモニタリングする役割を果たすPCモジュールと、
前記PCモジュールとボートミッションコンピューターとの間のデータ送信のハブの役割を果たし、遠隔制御信号およびボートの状態情報を双方向に中継する水上用統合GSC(Ground Station Controller)と、
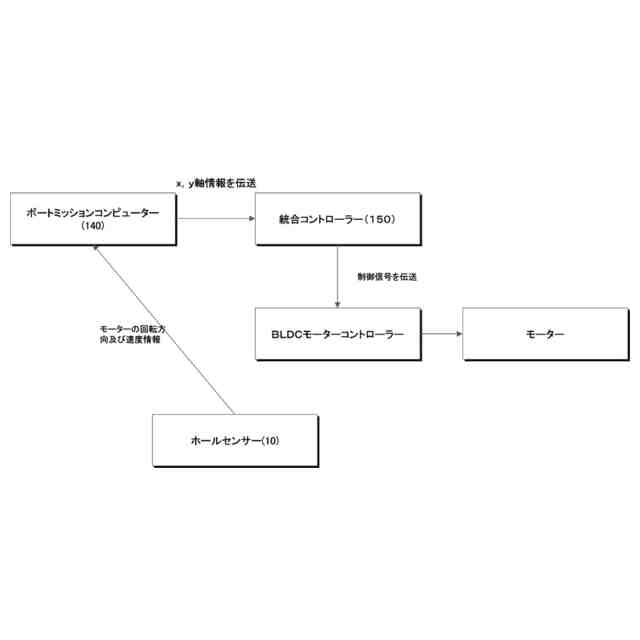
前記水上用統合GSCから伝達された遠隔制御信号を解釈してx、y軸情報に変換した後、これを統合コントローラーに伝達するボートミッションコンピューターと、
前記ボートミッションコンピューターから受けた操作情報に基づいて右側BLDCモーターコントローラー及び左側BLDCモーターコントローラーに電圧信号を出力してモーターの速度と方向を調整する統合コントローラーと、
前記統合コントローラーから電圧信号を受けてそれぞれ右側モーターおよび左側モーターを制御し、これによりボートの動きと方向を調整する右側BLDCモーターコントローラー及び左側BLDCモーターコントローラーと、を含むことを特徴とする、水上ボートのBLDCモーター遠隔制御システム。
続きを表示(約 2,700 文字)
【請求項2】
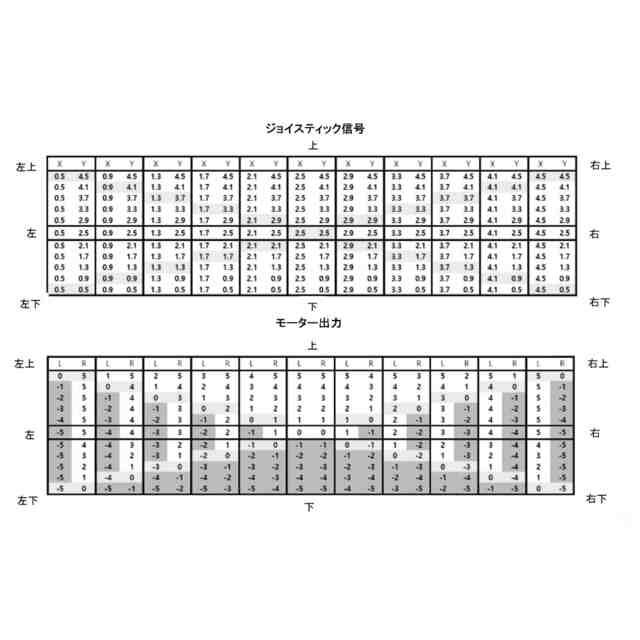
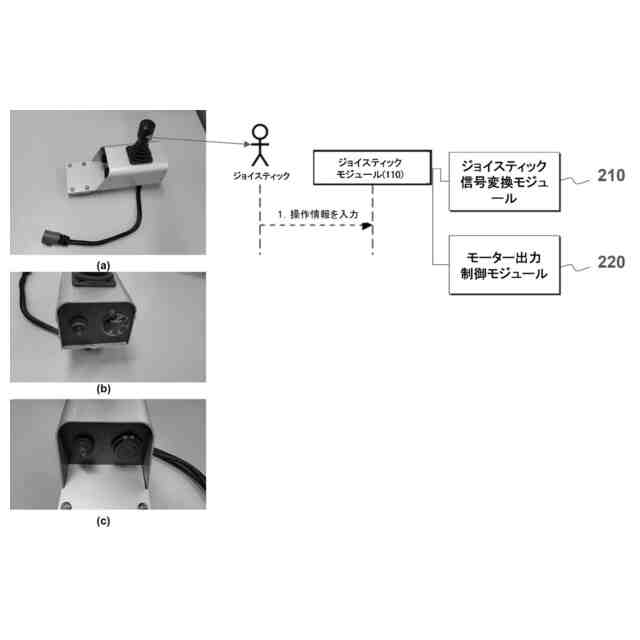
前記ジョイスティックで操作したx、y軸方向の信号を電圧信号に変換する装置であって、x軸とy軸に対する多様な角度で操作された信号をそれぞれ所定の電圧範囲の電圧信号として出力し、前記ジョイスティックの中心位置において、x、y軸の変化に応じて線形的に増減する電圧信号を生成して、モーター出力制御モジュールへ伝達するジョイスティック信号変換モジュールと、
前記ジョイスティック信号変換モジュールから受けた電圧信号に基づいて左側モーターおよび右側モーターの出力を調節し、入力されたジョイスティック電圧信号に対応して所定値を出力し、これはBLDCモーターの回転方向と速度を決定し、左側モーターおよび右側モーターの出力値は、ジョイスティックの位置に応じて独立に変化するモーター出力制御モジュールと、をさらに含むことを特徴とする、請求項1に記載の水上ボートのBLDCモーター遠隔制御システム。
【請求項3】
前記ジョイスティックの作動において、X軸信号は、ジョイスティックが左に移動すれば0に近くなり、右に移動すれば1に近くなり、Y軸信号は、ジョイスティックが上に移動すれば0に近くなり、下に移動すれば1に近くなり、前記ジョイスティックが8つの方向に移動することができるので、左上、左、左下、上、右上、右、右下、下の各方向に対する信号値は、当該方向に移動するジョイスティックの位置を示すことを特徴とする、請求項1に記載の水上ボートのBLDCモーター遠隔制御システム。
【請求項4】
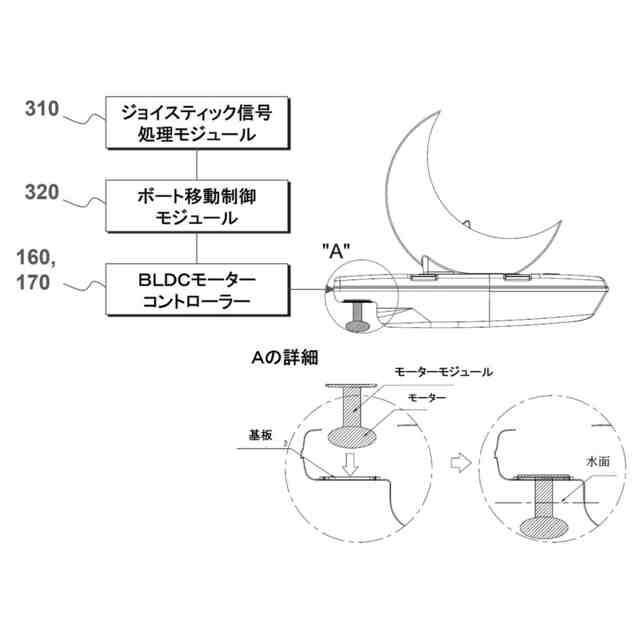
前記ジョイスティックからx軸及びy軸信号(x_signal、y_signal)を受信して、これを解釈することにより、ユーザーの操作による方向(左上、左下、左、右上、右下、右、上、下)を決めるジョイスティック信号処理モジュールと、
前記ジョイスティック信号処理モジュールから伝達された方向の決定によって、ボートの移動を制御するボート移動制御モジュールと、をさらに含むことを特徴とする、請求項2に記載の水上ボートのBLDCモーター遠隔制御システム。
【請求項5】
請求項1に記載の水上ボートのBLDCモーター遠隔制御システムを用いた方法において、
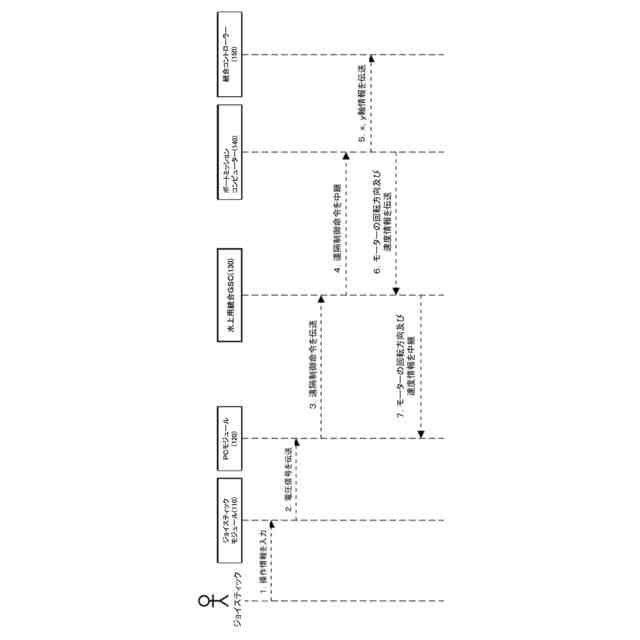
ジョイスティックモジュールがユーザーの操作によってx、y方向に電圧信号を出力する装置であって、360度方向別に操作可能であり、これを通じて生成された電圧信号をPCモジュールに伝送する段階と、
PCモジュールがジョイスティックモジュールで受信した電圧信号を水上用統合GSCを介して遠隔ボートへ伝送する役割を果たすとともに、ボートの状態情報を水上用統合GSCを介してリアルタイムで受信してモニタリングする段階と、
水上用統合GSCが遠隔制御信号およびボートの状態情報をPCモジュールとボートミッションコンピューターとの間で中継する段階と、を含むことを特徴とする、水上ボートのBLDCモーター遠隔制御システムを用いた方法。
【請求項6】
前記ボートミッションコンピューターが水上用統合GSCから受信したジョイスティックの方向信号をx、y座標情報に変換して統合コントローラーへ伝達し、ボートの状態情報を水上用統合GSCに伝送してPCモジュールへ常時更新を提供する段階をさらに含むことを特徴とする、請求項5に記載の水上ボートのBLDCモーター遠隔制御システムを用いた方法。
【請求項7】
統合コントローラーがボートミッションコンピューターから入力されたジョイスティックの電圧値に基づいてアップロードされた動作プログラムによってモーターコントローラーに電圧信号を出力し、これにより、右側BLDCモーターコントローラーおよび左側BLDCモーターコントローラーを独立に制御する段階をさらに含むことを特徴とする、請求項5に記載の水上ボートのBLDCモーター遠隔制御システムを用いた方法。
【請求項8】
右側BLDCモーターコントローラーおよび左側BLDCモーターコントローラーがそれぞれ統合コントローラーから伝達された電圧信号に基づいて右側モーターおよび左側モーターを駆動させる段階をさらに含むことを特徴とする、請求項5に記載の水上ボートのBLDCモーター遠隔制御システムを用いた方法。
【請求項9】
請求項1に記載の水上ボートのBLDCモーター遠隔制御システムを用いた方法において、
ジョイスティックモジュールがユーザーの操作によってx、y方向に電圧信号を出力する装置であって、360度方向別に操作可能であり、これにより生成された電圧信号をPCモジュールに伝送する段階と、
PCモジュールがジョイスティックモジュールで受信した電圧信号を、水上用統合GSCを介して遠隔ボートへ伝送するとともに、ボートの状態情報を、水上用統合GSCを介してリアルタイムで受信してモニタリングする段階と、
水上用統合GSCが遠隔制御信号およびボートの状態情報をPCモジュールとボートミッションコンピューターとの間で中継する段階と、
ホールセンサーを前記ボートの左側及び右側BLDCモーターに内蔵してモーターの回転方向及び速度情報を把握する段階と、を含むことを特徴とする、水上ボートのBLDCモーター遠隔制御システムを用いた方法。
【請求項10】
ユーザーによって操作されたジョイスティックモジュールのx、y軸方向の電圧信号をPCを介して受信し、この信号を遠隔ボートのボートミッションコンピューターへ伝送し、ユーザーの操作信号を360度方向別に解釈して、遠隔ボートの統合コントローラーに操作指示を提供する段階と、
前記ボートの内部に装着された左側及び右側BLDCモーターに内蔵されたホールセンサーから状態を感知し、モーターの回転方向及び速度情報を取得し、前記回転方向及び速度情報は、リアルタイムでボートミッションコンピューターに伝送され、前記ボートミッションコンピューターは、これを水上用統合GSCに送出して遠隔モニタリングを可能にする段階と、
前記内臓のホールセンサーによってそれ自体の運動状態を感知し、これらのホールセンサーはモーターの状態を感知してモーターの回転方向および速度を決定する段階とをさらに含むことを特徴とする、請求項9に記載の水上ボートのBLDCモーター遠隔制御システムを用いた方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、水上ボートのBLDCモーター遠隔制御システムに関し、より詳しくは、ユーザーの操作によってボートを遠隔で操縦するに際して、ジョイスティックにより精密でかつ迅速な反応性を提供する水上ボートのBLDCモーター遠隔制御システムに関する。
続きを表示(約 2,700 文字)
【背景技術】
【0002】
従来の技術では、ユーザーがジョイスティックを用いてボートを遠隔操縦するシステムであるが、この場合、精密な反応性と効率性に欠如しており、360度方向別の精密制御が困難であり、ジョイスティックのx、y軸操作信号を線形的に変換する技術も不十分であるからモーター出力の精巧な制御が不可能であった。
これにより、ジョイスティックの多様な方向操作を正確に認識し、これを効率よく電圧信号に変換してモーターコントローラーに伝達する技術開発の必要性が台頭した。
また、ユーザーの操作によるボートの方向の決定と動きの制御が不正確で且つ遅かったし、リアルタイム遠隔制御機能も制限的であった。これを解決するために、統合コントローラーとモーターコントローラーとの相互作用を通じてユーザーの操作情報を迅速で且つ正確に処理するシステムが開発された。
よって、ユーザーの操作に基づき、ボートを遠隔で操縦するシステムを通じて精密で且つ迅速な反応性を提供することで、全体的なボート操縦の正確度と効率性を大幅に向上させる装置の開発が求められるようになった。
【発明の概要】
【発明が解決しようとする課題】
【0003】
本発明は、前述した問題点を改善するために案出されたもので、その目的は、ユーザーの操作によってボートを遠隔で操縦するに際して、精密でかつ迅速な反応性を提供するシステムを構築することにより、各構成要素はユーザーの操作を精密に電圧信号に変換し、これにより、ボートの動きと方向を正確で且つ効率的に制御し、ユーザーの操作に基づいてボートの遠隔操縦を迅速で且つ正確に行うことができるように設計された水上ボートのBLDCモーター遠隔制御システムを提供することにある。
【課題を解決するための手段】
【0004】
上記の目的を達成するために、本発明の一実施形態は、ユーザーの操作情報を電圧信号に変換する装置であって、x、y軸方向の操作による360度方向別の電圧信号を出力してPCモジュールに伝送するジョイスティックモジュールと、前記ジョイスティックモジュールから受けた信号を処理し、これを遠隔操縦命令で水上用統合GSCを介してボートに伝送し、ボートの状態情報を受信してモニタリングする役割を果たすPCモジュールと、前記PCモジュールとボートミッションコンピューターとの間のデータ送信のハブの役割を果たし、遠隔制御信号およびボートの状態情報を双方向に中継する水上用統合GSC(Ground Station Controller)と、前記水上用統合GSCから伝達された遠隔制御信号を解釈してx、y軸情報に変換した後、これを統合コントローラーに伝達するボートミッションコンピューターと、前記ボートミッションコンピューターから受けた操作情報に基づいて右側BLDCモーターコントローラー及び左側BLDCモーターコントローラーに電圧信号を出力してモーターの速度と方向を調整する統合コントローラーと、前記統合コントローラーから電圧信号を受けてそれぞれ右側モーターおよび左側モーターを制御し、これによって、ボートの動きと方向を調整する右側BLDCモーターコントローラー及び左側BLDCモーターコントローラーと、を含む。
【0005】
ユーザーがジョイスティックで操作したx、y軸方向の信号を電圧信号に変換する装置であって、x軸とy軸に対する多様な角度で操作された信号をそれぞれ0.5V~4.5Vの範囲の電圧信号として出力し、前記ジョイスティックの中心位置において、x、y軸の変化に応じて線形的に増減する電圧信号を生成し、モーター出力制御モジュールに伝達するジョイスティック信号変換モジュールと、前記ジョイスティック信号変換モジュールから受けた電圧信号に基づいて左側モーターおよび右側モーターの出力を調節し、入力されたジョイスティック電圧信号に対応して-5~+5の間の値を出力し、これはBLDCモーターの回転方向と速度を決定し、左側モーターおよび右側モーターの出力値は、ジョイスティックの位置に応じて独立に変化するモーター出力制御モジュールと、をさらに含む。
【0006】
前記ジョイスティックの作動において、X軸信号は、ジョイスティックが左に移動すれば0に近くなり、右に移動すれば1に近くなり、Y軸信号は、ジョイスティックが上に移動すれば0に近くなり、下に移動すれば1に近くなり、前記ジョイスティックが8つの方向に移動することができるので、左上、左、左下、上、右上、右、右下、下の各方向に対する信号値は、当該方向に移動するジョイスティックの位置を示す。
【0007】
前記ジョイスティックからx軸及びy軸信号(x_signal、y_signal)を受信して、これを解釈することでユーザーの操作による方向(左上、左下、左、右上、右下、右、上、下)を決めるジョイスティック信号処理モジュールと、前記ジョイスティック信号処理モジュールから伝達された方向の決定によって、ボートの移動を制御するボート移動制御モジュールと、をさらに含む。
【0008】
本発明は、ジョイスティックモジュールがユーザーの操作によって、x、y方向に電圧信号を出力する装置であって、360度方向別に操作可能であり、これを通じて生成された電圧信号をPCモジュールに伝送する段階と、PCモジュールがジョイスティックモジュールで受信した電圧信号を水上用統合GSCを介して遠隔ボートへ伝送する役割を果たす。同時に、ボートの状態情報を水上用統合GSCを介してリアルタイムで受信してモニタリングする段階と、水上用統合GSCが遠隔制御信号およびボートの状態情報をPCモジュールとボートミッションコンピューターとの間で中継する段階と、を含む。
【0009】
ボートミッションコンピューターが水上用統合GSCから受信したジョイスティックの方向信号をx、y座標情報に変換して統合コントローラーへ伝達する。また、ボートの状態情報を水上用統合GSCに伝送してPCモジュールへ常時更新を提供する段階、をさらに含む。
【0010】
統合コントローラーがボートミッションコンピューターから入力されたジョイスティックの電圧値に基づいてアップロードされた動作プログラムによってモーターコントローラーに電圧信号を出力する。これによって、右側BLDCモーターコントローラーおよび左側BLDCモーターコントローラーを独立に制御する段階、をさらに含む。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
水上遊具
1か月前
個人
川下り用船
7か月前
個人
シーアンカー
10か月前
個人
発電船
8か月前
個人
船用横揺防止具
5か月前
個人
補助機構
4か月前
個人
コンパクトシティ船
4か月前
小柳建設株式会社
台船
10か月前
個人
渦流動力推進構造
3か月前
個人
セールのバテンガイド装置
6日前
ウラカミ合同会社
曳航ロボット
11か月前
炎重工株式会社
浮標
6か月前
個人
水質浄化・集熱昇温システム
27日前
炎重工株式会社
浮標
6か月前
炎重工株式会社
移動体
9か月前
住友重機械工業株式会社
船舶
22日前
個人
水陸両用移動装置
11か月前
個人
船舶
6か月前
個人
スクリュープロペラ
3か月前
株式会社フルトン
水中捕捉装置
4か月前
株式会社ラフティ
サーフボード
13日前
個人
回転式による流体流出防止タンカー
4か月前
オーケー工業株式会社
係留フック
4か月前
誠加興業股分有限公司
呼吸用マスク
11か月前
ヤマハ発動機株式会社
船外機
6か月前
スズキ株式会社
船外機
3か月前
常石造船株式会社
メタノール燃料船
7か月前
スズキ株式会社
船外機
3か月前
株式会社テラサン
位置保持システム
9か月前
スズキ株式会社
船外機
2か月前
スズキ株式会社
船外機
2か月前
株式会社ユピテル
システム及びプログラム等
3か月前
株式会社神戸タフ興産
船舶の甲板構造
7か月前
炎重工株式会社
自律航行浮遊体
6か月前
藤倉コンポジット株式会社
架台
6か月前
株式会社大林組
水中潜行システム
6か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ