TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025101998
公報種別
公開特許公報(A)
公開日
2025-07-08
出願番号
2023219136
出願日
2023-12-26
発明の名称
魚フィーレ骨抜き取りチャック、多関節ロボット、及び魚フィーレ骨抜き取りシステム
出願人
土佐電子工業株式会社
代理人
個人
,
個人
主分類
A22C
25/00 20060101AFI20250701BHJP(屠殺;肉処理;家禽または魚の処理)
要約
【課題】骨のずれを防止することができ、骨の周りの魚身に傷をつけることなく骨だけを確実に抜き取ることができる魚フィーレ骨抜き取りチャック、この魚フィーレ骨抜き取りチャックを動作させる多関節ロボット、及びこの多関節ロボットを有する魚フィーレ骨抜き取りシステムを提供すること。
【解決手段】一対の挟持部61A、61Bの前端に、骨Xの周囲に位置する魚身Yを押圧する押圧部62A、62Bを有し、一対の挟持部61A、61Bを開状態として、押圧部62A、62Bを骨Xの長手方向に押し当て、押圧部62A、62Bで魚身Yを押圧した状態で、一対の挟持部61A、61Bを閉動作させることで骨Xを挟持部61A、61Bにて掴み、挟持部61A、61Bを骨Xの長手方向に引き抜くことで骨Xを抜き取ることを特徴とする。
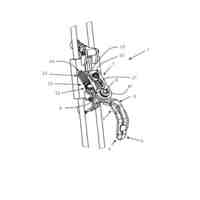
【選択図】 図1
特許請求の範囲
【請求項1】
魚フィーレから、一対の挟持部にて骨を掴んで抜き取る魚フィーレ骨抜き取りチャックであって、
一対の前記挟持部の前端に、前記骨の周囲に位置する魚身を押圧する押圧部を有し、
一対の前記挟持部を開状態として、前記押圧部を前記骨の長手方向に押し当て、
前記押圧部で前記魚身を押圧した状態で、一対の前記挟持部を閉動作させることで前記骨を前記挟持部にて掴み、
前記挟持部を前記骨の前記長手方向に引き抜くことで前記骨を抜き取る
ことを特徴とする魚フィーレ骨抜き取りチャック。
続きを表示(約 730 文字)
【請求項2】
一方の前記押圧部を、
一方の前記挟持部の前記前端の両側に配置するとともに、
一方の前記挟持部の一方側挟持面よりも、他方の前記挟持部の方向に延出させた
ことを特徴とする請求項1に記載の魚フィーレ骨抜き取りチャック。
【請求項3】
他方の前記押圧部を、
他方の前記挟持部の前記前端の両側に配置するとともに、
他方の前記挟持部の他方側挟持面よりも、一方の前記挟持部の方向に延出させた
ことを特徴とする請求項2に記載の魚フィーレ骨抜き取りチャック。
【請求項4】
前記一方側挟持面及び前記他方側挟持面には、挟み込む前記骨の前記長手方向に垂直な方向に畝部を形成している
ことを特徴とする請求項3に記載の魚フィーレ骨抜き取りチャック。
【請求項5】
請求項1から請求項4のいずれか1項に記載の魚フィーレ骨抜き取りチャックを動作させる多関節ロボットであって、
前記魚フィーレ骨抜き取りチャックを移動させるとともに一対の前記挟持部を開閉動作させる
ことを特徴とする多関節ロボット。
【請求項6】
請求項5に記載の多関節ロボットを有する魚フィーレ骨抜き取りシステムであって、
前記魚フィーレを載置するパレットと、
前記パレットを移動させるコンベアと、
前記パレットに載置されている前記魚フィーレを撮影するカメラと
を有し、
前記カメラで撮影された画像によって特定された前記骨を、前記魚フィーレ骨抜き取りチャックによって掴んで抜き取る
ことを特徴とする魚フィーレ骨抜き取りシステム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、魚身、とくに3枚におろした魚の半身から小骨、ピンボーンを正確に抜き取る魚フィーレ骨抜き取りチャック、この魚フィーレ骨抜き取りチャックを動作させる多関節ロボット、及びこの多関節ロボットを有する魚フィーレ骨抜き取りシステムに関する。
続きを表示(約 5,300 文字)
【背景技術】
【0002】
現在日本において、サーモンの市場は年間40万トンを超える需要がある。日本でのサケ・サーモン生産はその多くが天然漁獲によるものであり、一般的に「天然物」好きな日本人の嗜好に合致しているが、一方で寄生虫等の課題があり「生食用」に適していない。この産業構造によって輸入が増加しており、「生食用」加工品は「加熱用」加工品に比べ一般的に高付加価値であることを鑑みれば、結果として日本の生産者、加工会社に利益としての付加価値が落ちにくい状況である。
サケ・サーモンは日本人に特に定着した魚種の一つであること、及び天然漁獲量は資源制約などから増加させることは難しく「生食用」として不適であることから、国内では、サケ・サーモン養殖が拡大傾向にあり、輸入品から国産品への一部シフトが期待されている。
サーモンの加工工程は、うろこ取り・ヘッドカット・三枚おろし・スキンナー・ピンボーン除去からなる。現在、うろこ取り・ヘッドカット・三枚おろし・スキンナーにおいては既存の水産加工機械を用いて、サーモンのサイズに関わらず自動化が可能である。しかしながら、サーモンの上神経骨(小骨もしくはピンボーン)の骨抜き作業は、未だ人手に頼っているのが現状であり、多大な労力を要している。ピンボーンを自動で抜き取る機器も考案されているが様々な課題がある。参考文献に沿って説明する。
特許文献1は、魚フィーレのピンボーンを、巻き込むように回転する一組のベルトに挟ませることにより、抜く装置である。しかしながら魚の形状、骨のある位置に個体差のばらつきがあるため、ベルトに対して骨が位置ずれしている場合、骨のない部分をベルトに挟み込み骨の取り残しが発生する場合がある。
特許文献2は、魚フィーレから突出したピンボーンに対して、特定の挟持部材でそのピンボーンをはさみ抜き取る仕組みのため、埋もれている骨や、魚フィーレ個体差により挟持部材とピンボーンの位置がずれた場合は、うまく抜けなかったり、取り残しが発生する。
特許文献3は、魚フィーレに対して回転ローラーを押しあて、魚フィーレの進行方向と反対方向に回転ローラーを回転させ、そのローラーは骨を通過させる網のような構造でできており、その網に骨を通過させることによりピンボーンを引き抜くものであるが、ピンボーンがフィーレから突出している必要がある。
特許文献4は、魚フィーレにローラーを押し当てることによりピンボーンを突出させ、その状態を維持した状態で、爪のような治具によりピンボーンを引き抜く構造であるが、魚の形状、骨のある位置に個体差のばらつきがあるため、治具位置に対して骨が位置ずれしている場合、骨の取り残しが発生する場合がある。
以上述べたように、これらの装置は対象の骨を、魚身表面に対して垂直に刺さっている骨に限定されていたり、ピンボーンを突出させるため骨抜き装置で魚身を押さえたりするため、魚身を変形させるという課題がある。さらにそれらの装置に共通している課題は、骨の位置を特定した後骨を抜いているのではなく、骨のありそうな位置に対して骨抜きを行っているため、骨の取り残しが発生したり、骨の周りの魚身に触ったりし、場合により魚身を傷つけることも考えられ、魚フィーレが廃棄される場合もある。そのためサーモンの骨抜きは人手が主流であり、これらの問題により現状自動化ができていない。
特許文献5は、骨の位置を画像で確認しているが、魚フィーレの大きさ、形状のばらつき、骨の位置、方向のばらつきなどがあり、通常のカメラと直行ロボットだけでは対応するのは難しく、骨の位置の3次元的計測や、その計測により骨の刺さっている方向も認識し、その方向に沿って3次元的動きにより骨を抜き取るということはできないという課題がある。そのため無理に骨を抜いて魚身を痛めたり、取り残しが発生したりする場合があるが、それに対するリカバリーが十分でなく、全自動システムという形態にはなっていない。
このように、魚フィーレの骨を自動で抜く装置として特許文献1から4が提案されている。しかしこれらの装置は対象の骨を、魚身表面に対して垂直に刺さっている骨に限定されている、また、骨抜き装置と魚身を接触させるために魚身を押さえたり、下から持ち上げたりすることで魚身を変形させるという課題がある。さらに、それらの装置に共通している課題として、骨の位置を特定した後に骨を抜いているのではなく、骨のありそうな位置に対して骨抜きを行うことで、骨の取り残しが発生したり、骨の周りの魚身に触れたりして、場合により魚身を傷つけることも考えられる。そのため、魚フィーレが廃棄される場合もある。
そのため、サーモンの骨抜きは人手に頼ることが主流であり、これらの課題により現状は自動化ができていない。
近年、主要都市のバックヤードでは、工員確保が難しく、さらに熟練された工員の不足もあり、骨抜き作業を含めた、高次加工が産地に求められている。しかし、産地での熟練された工員の確保も、工員の高齢化とともに年々厳しくなっており、産地加工工場の機械化、無人化が要望されている。さらに、全世界においても日本食ブームが加速しており、冷凍の刺身用切り身や冷凍の寿司ネタの需要が年々増えている。
しかしながら魚身を傷つけないように骨だけを抜くのではなく、骨の周りの魚身に触れて、場合により魚身を傷つけることも考えられる。さらに最近の骨なし切り身の需要増に対応して、アジ、タイなどの小型の魚の骨抜きも要求されており、様々な魚の種類、サイズに対応した全自動骨抜きシステムが求められているが、そのような課題を解決できるシステムは未だにない状況である。
このような状況の中で、本出願人は、魚フィーレに対する骨の位置を一本一本認識させ、骨の周りの魚身に傷をつけることなく骨だけを抜き取ることができる魚フィーレ骨抜き取りシステムを既に提案している(特許文献6)。
特許文献6で提案している魚フィーレ骨抜き取りシステムによれば、魚フィーレに対する骨の位置を一本一本認識させ、骨の周りの魚身に傷をつけることなく骨だけを抜き取ることができる。
【先行技術文献】
【特許文献】
【0003】
特許第4955036号公報
特開2001-61404号公報
特公平07-063300号公報
特許第4078281号公報
特許第6006568号公報
特許第6950994号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献6で開示しているように、魚フィーレ骨抜き取りチャックを用いることで、特許文献1から特許文献5の方法に比べて、骨の周りの魚身に傷をつけることなく骨だけを抜き取ることができるが、骨を挟んでチャックをすぼめる過程で、骨がずれることがあり、大きくずれるとチャックから骨がはみ出す場合がある。このように骨がチャックからはみ出してしまうと、骨を掴むことができない。骨がずれる原因としては、骨の周りに魚身がついており、骨を掴もうとするときに、魚身を骨と一緒に挟んでしまうため、チャックをすぼめる過程で魚身が移動することに起因する。
【0005】
本発明は、骨のずれを防止することができ、骨の周りの魚身に傷をつけることなく骨だけを確実に抜き取ることができる魚フィーレ骨抜き取りチャック、この魚フィーレ骨抜き取りチャックを動作させる多関節ロボット、及びこの多関節ロボットを有する魚フィーレ骨抜き取りシステムを提供することを目的とする。
【課題を解決するための手段】
【0006】
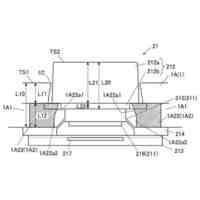
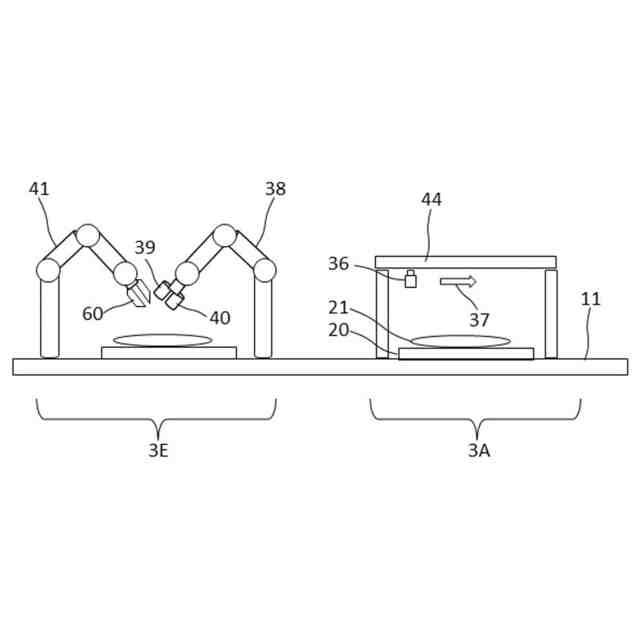
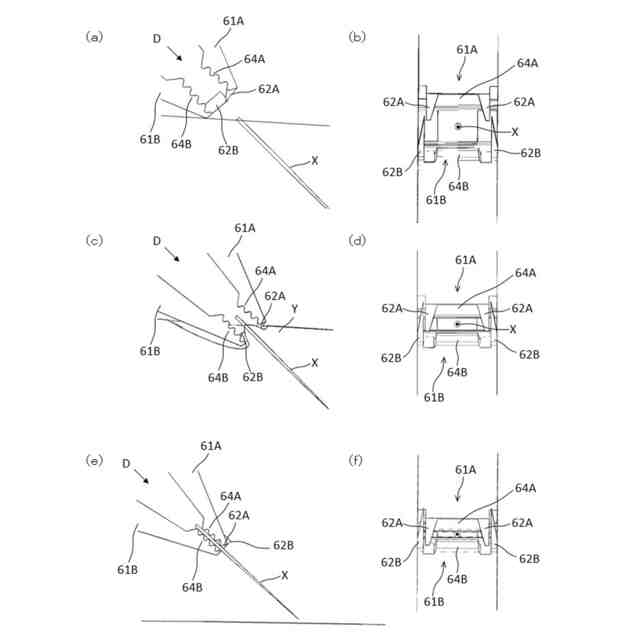
請求項1記載の本発明の魚フィーレ骨抜き取りチャックは、魚フィーレ21から、一対の挟持部61A、61Bにて骨Xを掴んで抜き取る魚フィーレ骨抜き取りチャック60であって、一対の前記挟持部61A、61Bの前端に、前記骨Xの周囲に位置する魚身Yを押圧する押圧部62A、62Bを有し、一対の前記挟持部61A、61Bを開状態として、前記押圧部62A、62Bを前記骨Xの長手方向に押し当て、前記押圧部62A、62Bで前記魚身Yを押圧した状態で、一対の前記挟持部61A、61Bを閉動作させることで前記骨Xを前記挟持部61A、61Bにて掴み、前記挟持部61A、61Bを前記骨Xの前記長手方向に引き抜くことで前記骨Xを抜き取ることを特徴とする。
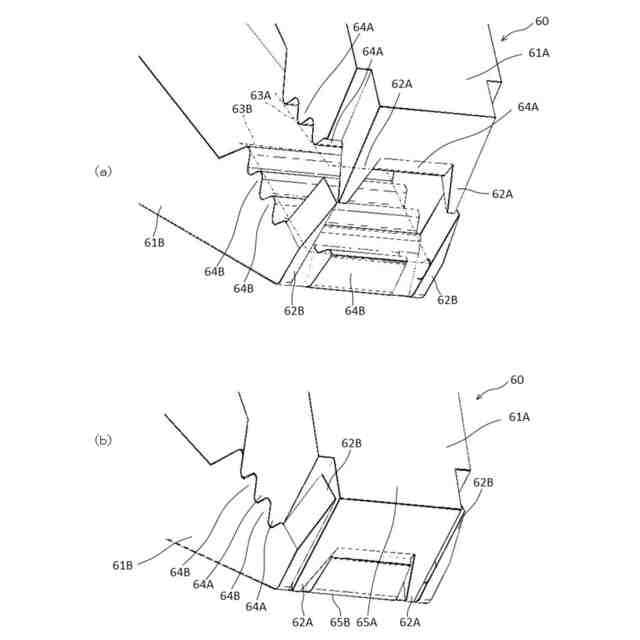
請求項2記載の本発明は、請求項1に記載の魚フィーレ骨抜き取りチャック60において、一方の前記押圧部62Aを、一方の前記挟持部61Aの前記前端の両側に配置するとともに、一方の前記挟持部61Aの一方側挟持面63Aよりも、他方の前記挟持部61Bの方向に延出させたことを特徴とする。
請求項3記載の本発明は、請求項2に記載の魚フィーレ骨抜き取りチャック60において、他方の前記押圧部62Bを、他方の前記挟持部61Bの前記前端の両側に配置するとともに、他方の前記挟持部61Bの他方側挟持面63Bよりも、一方の前記挟持部61Aの方向に延出させたことを特徴とする。
請求項4記載の本発明は、請求項3に記載の魚フィーレ骨抜き取りチャック60において、前記一方側挟持面63A及び前記他方側挟持面63Bには、挟み込む前記骨Xの前記長手方向に垂直な方向に畝部64A、64Bを形成していることを特徴とする。
請求項5記載の本発明の多関節ロボット41、51は、請求項1から請求項4のいずれか1項に記載の魚フィーレ骨抜き取りチャック60を動作させる多関節ロボット41、51であって、前記魚フィーレ骨抜き取りチャック60を移動させるとともに一対の前記挟持部61A、61Bを開閉動作させることを特徴とする。
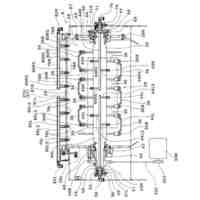
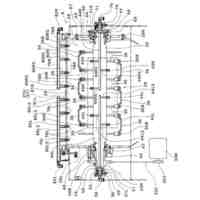
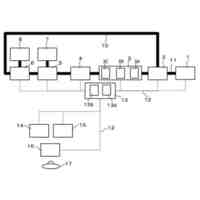
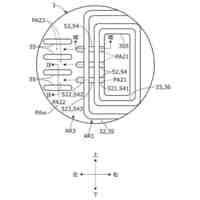
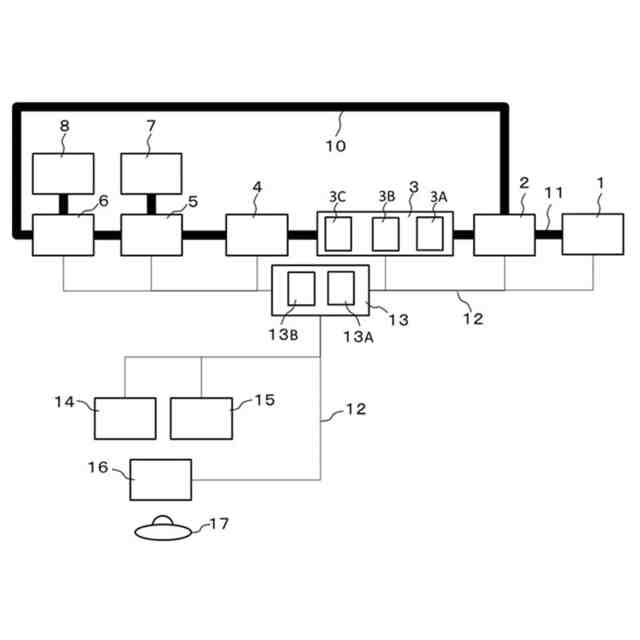
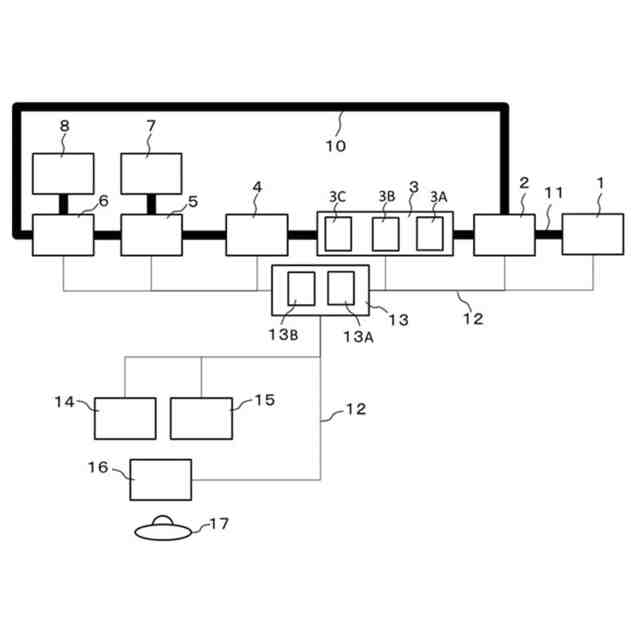
請求項6記載の本発明の魚フィーレ骨抜き取りシステムは、請求項5に記載の多関節ロボット41、51を有する魚フィーレ骨抜き取りシステムであって、前記魚フィーレ21を載置するパレット20と、前記パレット20を移動させるコンベア10と、前記パレット20に載置されている前記魚フィーレ21を撮影するカメラ40とを有し、前記カメラ40で撮影された画像によって特定された前記骨Xを、前記魚フィーレ骨抜き取りチャック60によって掴んで抜き取ることを特徴とする。
【発明の効果】
【0007】
本発明によれば、骨の周囲に位置する魚身を押圧することで、骨のずれを防止することができるとともに、押圧部を骨の長手方向に押し当てることで、骨を魚身から露出させることができるため、骨の周りの魚身に傷をつけることなく骨だけを抜き取ることができる。
【図面の簡単な説明】
【0008】
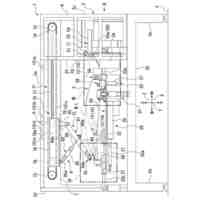
本発明の実施例1による魚フィーレ骨抜き取りシステムを示す工程図
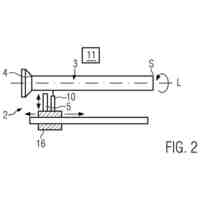
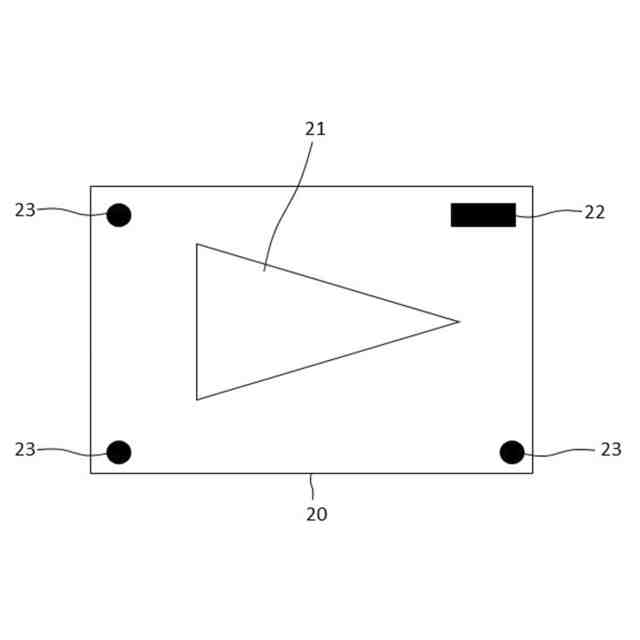
同魚フィーレ骨抜き取りシステムで用いるパレットを示す構成図
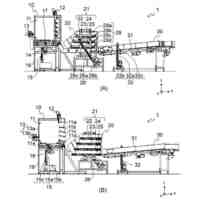
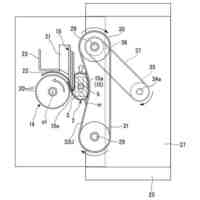
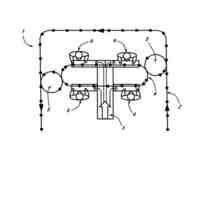
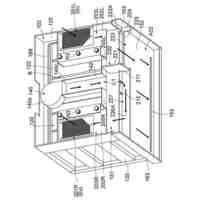
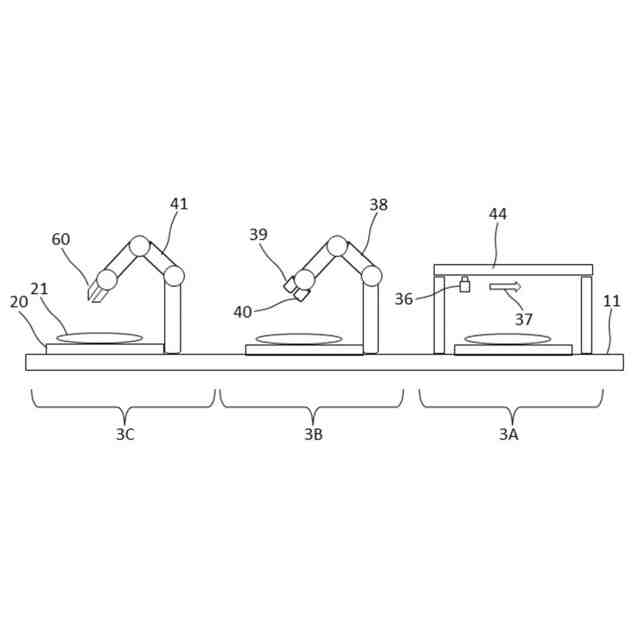
同魚フィーレ骨抜き取りシステムの作業場所を示す構成図
本発明の実施例2による魚フィーレ骨抜き取りシステムの作業場所を示す構成図
本発明の実施例3による魚フィーレ骨抜き取りシステムの作業場所を示す構成図
図3から図5に示す骨抜き取りチャックの要部斜視図
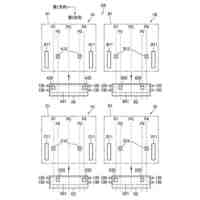
図6に示す骨抜き取りチャックの動作工程を示す図
図3から図5に示す骨抜き取りチャックの他の構成を示す要部斜視図
【発明を実施するための形態】
【0009】
本発明の第1の実施の形態による魚フィーレ骨抜き取りチャックは、一対の挟持部の前端に、骨の周囲に位置する魚身を押圧する押圧部を有し、一対の挟持部を開状態として、押圧部を骨の長手方向に押し当て、押圧部で魚身を押圧した状態で、一対の挟持部を閉動作させることで骨を挟持部にて掴み、挟持部を骨の長手方向に引き抜くことで骨を抜き取るものである。本実施の形態によれば、骨の周囲に位置する魚身を押圧することで、骨のずれを防止することができるとともに、押圧部を骨の長手方向に押し当てることで、骨を魚身から露出させることができるため、骨の周りの魚身に傷をつけることなく骨だけを抜き取ることができる。
【0010】
本発明の第2の実施の形態は、第1の実施の形態による魚フィーレ骨抜き取りチャックにおいて、一方の押圧部を、一方の挟持部の前端の両側に配置するとともに、一方の挟持部の一方側挟持面よりも、他方の挟持部の方向に延出させたものである。本実施の形態によれば、一対の挟持部の間から骨がはみ出すことを防止することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社日本キャリア工業
食料処理装置
1か月前
プライフーズ株式会社
生鳥移送装置
3か月前
株式会社前川製作所
皮剥ぎ装置
1か月前
株式会社日本キャリア工業
食料処理装置及び食料処理装置の洗浄方法
17日前
株式会社日本キャリア工業
食料処理装置及び食料処理装置の洗浄方法
17日前
株式会社前川製作所
皮剥き装置及び冷凍魚の皮剥き方法
5か月前
土佐電子工業株式会社
魚フィーレ骨抜き取りチャック、多関節ロボット、及び魚フィーレ骨抜き取りシステム
1か月前
メイン フード プロセシング テクノロジー ベー.フェー.
膝蓋骨を取り外す方法及び膝蓋骨採取機
2か月前
株式会社前川製作所
食肉用のカットポイント決定システム、カットポイント決定方法、及び、カットポイント決定プログラム
1か月前
メイン フード プロセシング テクノロジー ベー.フェー.
家禽吊り下げシステム、家禽搬送ラインおよび家禽吊り下げ方法
4か月前
アルベルト ハントマン マシネンファブリク ゲーエムベーハー ウント ツェーオー.カーゲー
径方向にスパウトを整列させる為の充填機および方法
4か月前
メイン フード プロセシング テクノロジー ベー.フェー.
内臓除去具、内臓除去装置、内臓除去具用のカムプレート、および内臓除去具用の顎部アーム
2か月前
マレル・ファーザー・プロセッシング・ベスローテン・フェンノートシャップ
ブライン溶液のセット及び食品生産物をインライン加工するための方法
5か月前
株式会社アイチコーポレーション
バッテリ装置
2か月前
花王株式会社
リパーゼ変異体
1か月前
東北パイオニア株式会社
スピーカ装置
3か月前
カシオ計算機株式会社
押釦装置
2か月前
日本ペイント株式会社
多液型クリヤー塗料組成物、複層塗膜および複層塗膜の形成方法
2か月前
本田技研工業株式会社
燃料電池用セパレータおよび燃料電池スタック
4か月前
ノリタケ株式会社
熱処理装置
24日前
ブラザー工業株式会社
画像形成システムおよび画像形成装置
2か月前
リサーチ インスティチュート アット ネイションワイド チルドレンズ ホスピタル
強力ながん治療薬としての合胞体腫瘍溶解性単純ヘルペス変異体
5か月前
デイナ ファーバー キャンサー インスティチュート,インコーポレイテッド
構造的に安定化されたペプチドによるユビキチンおよびユビキチン様E1活性化酵素の選択的標的化
25日前
ザ ボード オブ トラスティーズ オブ ザ レランド スタンフォード ジュニア ユニバーシティー
免疫応答をモジュレートするENPP1阻害剤および方法
1か月前
三井化学株式会社
オレフィン重合触媒およびオレフィン重合体の製造方法
16日前
パナソニックIPマネジメント株式会社
封止用液状樹脂組成物及び半導体装置
2か月前
シンセカイン インコーポレイテッド
IL-2オルソログおよび使用法
25日前
ザ ボード オブ トラスティーズ オブ ザ レランド スタンフォード ジュニア ユニバーシティー
リソソーム標的化のための二官能性分子ならびに関連する組成物および方法
4か月前
株式会社デンソー
電力制御装置
5か月前
日本ペイント株式会社
水性塗料組成物および塗装物品の製造方法
10日前
バイエル クロップサイエンス エルピー
パエニバシラスの突然変異体およびその使用方法
4か月前
ユニバーシティ オブ ピッツバーグ - オブ ザ コモンウェルス システム オブ ハイヤー エデュケイション
薬剤を送達するための小型ポリマー担体
4か月前
個人
浮力と重力のバランスを利用した動力発生装置。
5か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
1か月前
積水ハウス株式会社
建物の部位の気密測定方法
19日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ