TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025101193
公報種別
公開特許公報(A)
公開日
2025-07-07
出願番号
2023217848
出願日
2023-12-25
発明の名称
操舵制御装置
出願人
株式会社ジェイテクト
,
トヨタ自動車株式会社
代理人
個人
,
個人
主分類
B62D
6/00 20060101AFI20250630BHJP(鉄道以外の路面車両)
要約
【課題】オフセット補正量の減少速度が過度に小さくなることを抑制できるようにした操舵制御装置を提供する。
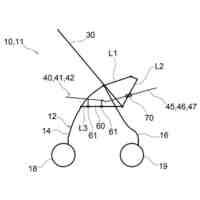
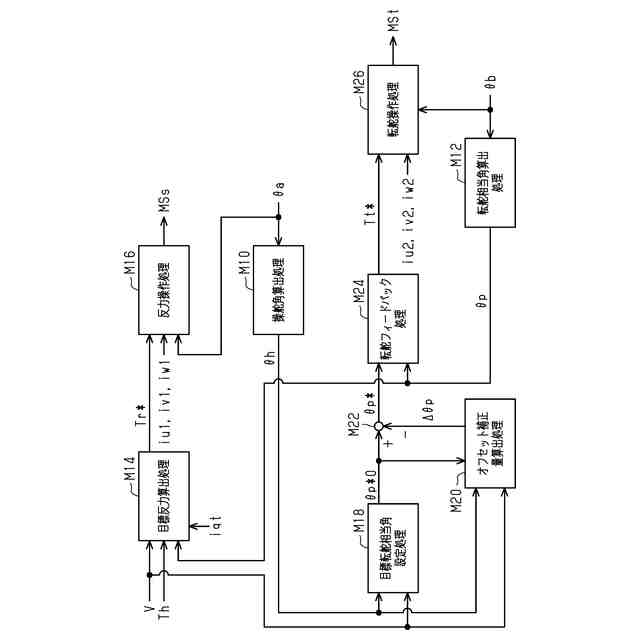
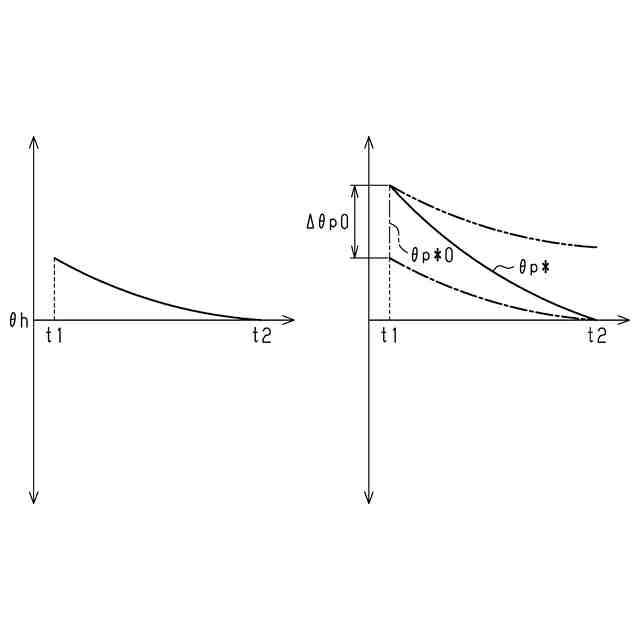
【解決手段】PUは、入力変数としての操舵角に応じて目標転舵相当角θp*0を設定する。PUは、目標転舵相当角θp*0が不連続的に変化する所定の条件をトリガとして、目標転舵相当角θp*0と転舵相当角θpとの差であるオフセット量を算出する。PUは、目標転舵相当角θp*からオフセット量に応じたオフセット補正量Δθpを減算することによって目標転舵相当角θp*を算出する。PUは、オフセット量を算出したタイミングからのステアリング軸の回転量に応じてオフセット補正量の減少速度を設定する。
【選択図】図2
特許請求の範囲
【請求項1】
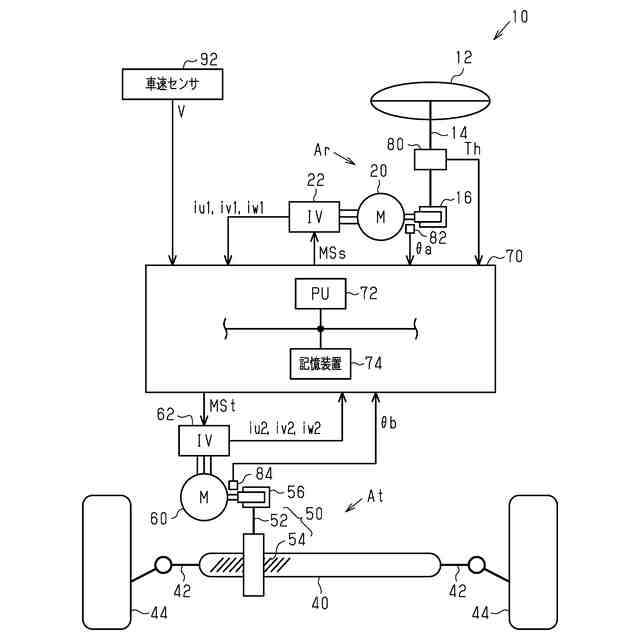
転舵輪とステアリング軸とが機械的に遮断された状態において、目標転舵相当角設定処理、操作処理、オフセット量算出処理、オフセット補償処理、およびオフセットキャンセル処理を実行するように構成され、
前記目標転舵相当角設定処理は、入力変数としての操舵角に基づき目標転舵相当角を設定する処理であり、
前記操舵角は、前記ステアリング軸の回転角度であり、
前記目標転舵相当角は、前記転舵輪の転舵角を示す変数である転舵相当角の目標値であり、
前記操作処理は、前記目標転舵相当角が制御量の目標値である制御の操作量に応じて前記転舵輪を転舵させるモータを操作する処理であり、
前記オフセット量算出処理は、所定の条件が成立することをトリガとして前記目標転舵相当角と実際の前記転舵相当角との差分相当量であるオフセット量を算出する処理であり、
前記オフセット補償処理は、前記オフセット量に応じたオフセット補正量によって前記操作処理の入力としての前記目標転舵相当角を補正する処理であり、
前記オフセットキャンセル処理は、前記オフセット補正量の大きさを減少させる処理であって且つ、前記オフセット量算出処理によって前記オフセット量が算出された時点からの前記ステアリング軸の回転量に応じて前記オフセット量の減少速度を変更する処理である操舵制御装置。
続きを表示(約 320 文字)
【請求項2】
前記オフセットキャンセル処理は、前記オフセット量算出処理によって前記オフセット量が算出された時点における操舵変数の値をラッチする処理を含んで且つ、前記ラッチした前記操舵変数の値と現在の前記操舵変数の値との差に応じて前記減少速度を変更する処理であり、
前記操舵変数は、前記ステアリング軸の回転角度と相関を有する変数である請求項1記載の操舵制御装置。
【請求項3】
車速を取得する車速取得処理を実行するように構成され、
前記オフセットキャンセル処理は、前記車速が所定速度以下であることを条件に、前記ステアリング軸の回転量に応じて前記減少速度を変更する処理である請求項1記載の操舵制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、操舵制御装置に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
たとえば下記特許文献1には、ステアリングホイールと転舵輪との動力の伝達が遮断されたステアバイワイヤシステムにおける操舵制御装置が記載されている。この装置は、車両の起動スイッチがオフ状態からオン状態に切り替わった時点において、操舵角から定まる目標転舵角と実際の転舵角とのずれであるオフセット量を算出する。そして、この装置は、オフセット量を初期値とするオフセット補正量によって操舵角から定まる目標転舵角を補正した後、オフセット量を徐々に減少させている。この装置は、オフセット補正量の減少速度を車速と補正前の目標転舵角の変化速度とに応じて設定している。
【先行技術文献】
【特許文献】
【0003】
特開2022-37765号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
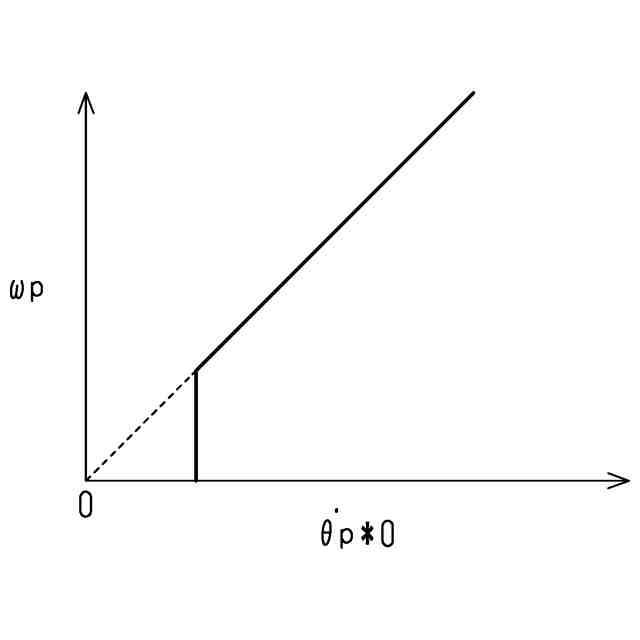
ところで、操舵角が極めてゆっくり変化する場合、オフセット補正量の減少速度が過度に小さくなり、目標転舵角を、操舵角から定まる値に迅速に戻すことができない。
【課題を解決するための手段】
【0005】
以下、上記課題を解決するための手段およびその作用効果について記載する。
1.転舵輪とステアリング軸とが機械的に遮断された状態において、目標転舵相当角設定処理、操作処理、オフセット量算出処理、オフセット補償処理、およびオフセットキャンセル処理を実行するように構成され、前記目標転舵相当角設定処理は、入力変数としての操舵角に基づき目標転舵相当角を設定する処理であり、前記操舵角は、前記ステアリング軸の回転角度であり、前記目標転舵相当角は、前記転舵輪の転舵角を示す変数である転舵相当角の目標値であり、前記操作処理は、前記目標転舵相当角が制御量の目標値である制御の操作量に応じて前記転舵輪を転舵させるモータを操作する処理であり、前記オフセット量算出処理は、所定の条件が成立することをトリガとして前記目標転舵相当角と実際の前記転舵相当角との差分相当量であるオフセット量を算出する処理であり、前記オフセット補償処理は、前記オフセット量に応じたオフセット補正量によって前記操作処理の入力としての前記目標転舵相当角を補正する処理であり、前記オフセットキャンセル処理は、前記オフセット補正量の大きさを減少させる処理であって且つ、前記オフセット量算出処理によって前記オフセット量が算出された時点からの前記ステアリング軸の回転量に応じて前記オフセット量の減少速度を変更する処理である操舵制御装置。
【0006】
オフセット量が算出された後、操舵角が極めてゆっくり変化する場合であっても、ステアリング軸が回転するのであれば、ステアリング軸の回転量は漸増する。そのため、上記構成では、オフセット量が算出された時点からのステアリング軸の回転量に応じてオフセット補正量の減少速度が算出される。これにより、ステアリング軸が極めてゆっくり回転する場合であっても、オフセット補正量の減少速度をステアリング軸のトータルの変位量に応じて調整することができる。そのため、オフセット補正量の減少速度が過度に小さくなることを抑制できる。
【0007】
2.前記オフセットキャンセル処理は、前記オフセット量算出処理によって前記オフセット量が算出された時点における操舵変数の値をラッチする処理を含んで且つ、前記ラッチした前記操舵変数の値と現在の前記操舵変数の値との差に応じて前記減少速度を変更する処理であり、前記操舵変数は、前記ステアリング軸の回転角度と相関を有する変数である上記1記載の操舵制御装置。
【0008】
上記構成では、ラッチした操舵変数の値と現在の値との差を用いることによって、オフセット量の算出後におけるステアリング軸の回転量を高精度に定量化して用いることができる。
【0009】
3.車速を取得する車速取得処理を実行するように構成され、前記オフセットキャンセル処理は、前記車速が所定速度以下であることを条件に、前記ステアリング軸の回転量に応じて前記減少速度を変更する処理である上記1または2記載の操舵制御装置。
【0010】
車速が大きい場合には、車速が小さい場合と比較して、目標転舵角の変更には注意を要する。そこで、上記構成では、ステアリング軸の回転量に応じたオフセット補正量の減少速度の設定を車速が所定速度以下であることを条件に実行する。これにより、回転量に応じた減少速度の変更が車両の運転に与える影響を軽減できる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
カート
14日前
個人
走行装置
28日前
個人
電動走行車両
28日前
個人
乗り物
2か月前
個人
電動モビリティ
4か月前
個人
閂式ハンドル錠
28日前
個人
折り畳み自転車
7か月前
個人
発音装置
4か月前
個人
体重掛けリフト台車
8か月前
個人
自由方向乗車自転車
4か月前
個人
自転車用荷物台
8か月前
個人
キャンピングトライク
5か月前
個人
ステアリングの操向部材
6か月前
株式会社豊田自動織機
産業車両
1か月前
個人
フロントフットブレーキ。
1か月前
株式会社三五
リアサブフレーム
7か月前
学校法人千葉工業大学
車両
7か月前
学校法人千葉工業大学
車両
7か月前
学校法人千葉工業大学
車両
7か月前
個人
ホイールハブ駆動構造
1か月前
豊田鉄工株式会社
小型車両
11日前
ヤマハ発動機株式会社
自転車
1か月前
株式会社クボタ
作業車
3か月前
コンビ株式会社
乳母車
3か月前
株式会社オカムラ
搬送用什器
5か月前
株式会社カインズ
台車
7か月前
株式会社カインズ
台車
5か月前
個人
走行車両等の粉塵飛散防止装置
28日前
トヨタ自動車株式会社
パネル
1か月前
株式会社GEAR
電動カート
1か月前
個人
自転車の駐輪場システム
2か月前
株式会社ジェイテクト
操舵装置
3か月前
ダイハツ工業株式会社
車両構造
1か月前
株式会社アテックス
自走式乗用草刈機
5か月前
個人
自転車のチェーン駆動機構
5か月前
株式会社ジェイテクト
操舵装置
5か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ