TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025094915
公報種別
公開特許公報(A)
公開日
2025-06-25
出願番号
2024213385
出願日
2024-12-06
発明の名称
船舶操縦桿への力フィードバックの適用制御
出願人
ボルボ ペンタ コーポレーション
,
VOLVO PENTA CORPORATION
代理人
個人
,
個人
,
個人
,
個人
主分類
B63H
25/02 20060101AFI20250618BHJP(船舶またはその他の水上浮揚構造物;関連艤装品)
要約
【課題】船舶のための航海操縦システムが提供される。
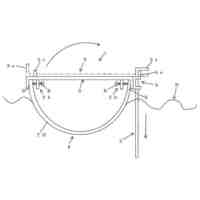
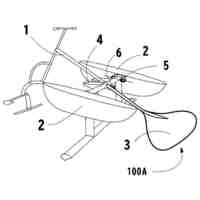
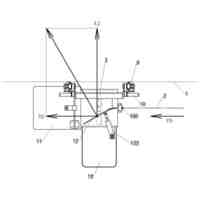
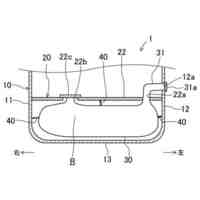
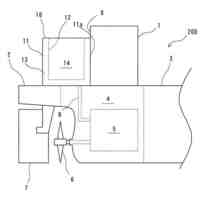
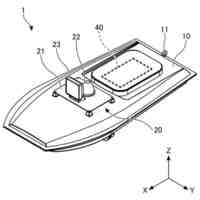
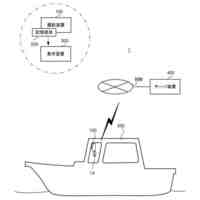
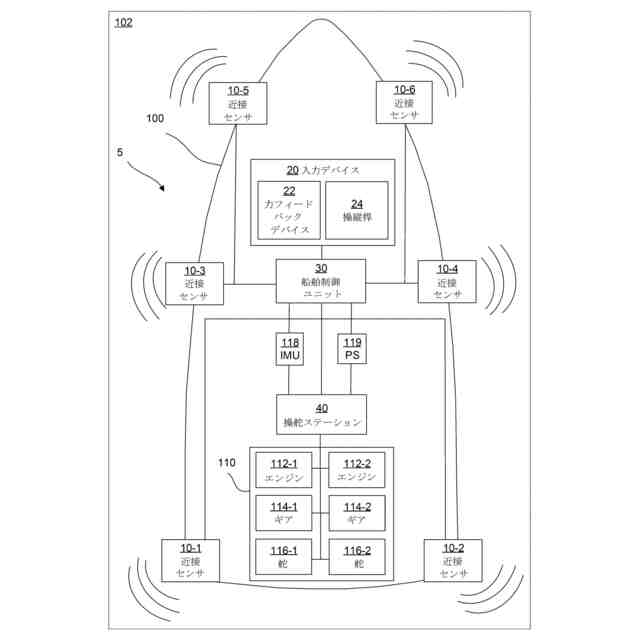
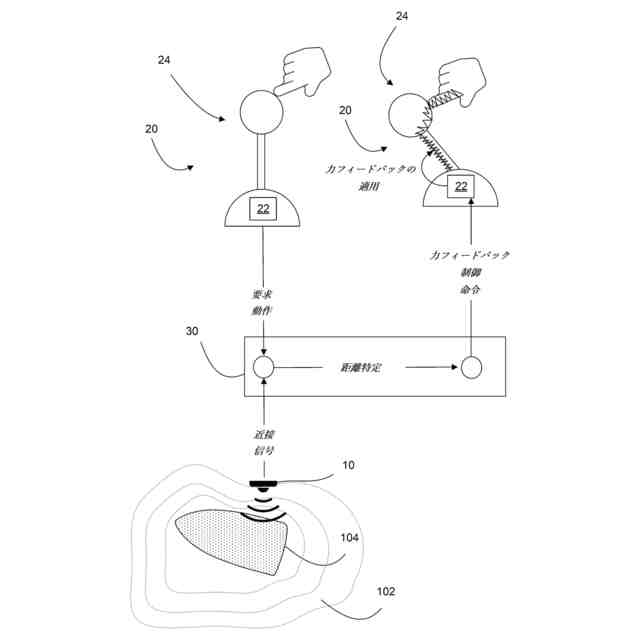
【解決手段】船舶操縦システムは、船舶制御ユニット(30)を備え、船舶制御ユニット(30)は、船舶の次の航行の速度値及び方向値を示す操縦桿(24)の要求動作を取得することと、前記船舶を取り囲む周囲(102)の少なくとも一部において、少なくとも操縦桿(24)の前記方向値が示す方向に、対象物(104)が感知されたことに応答して、近接センサ(10)から近接信号を取得することと、近接信号に基づいて、船舶(と対象物(104)との間の距離を特定することと、特定した距離に基づいて操縦桿(24)に力フィードバックを適用するように、力フィードバックデバイス(22)を制御することと、を実行するように構成される。
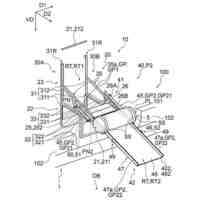
【選択図】図2
特許請求の範囲
【請求項1】
船舶のための航海操縦システムであって、
前記船舶を取り囲む周囲の少なくとも一部を感知するように構成された近接センサと、
航行コマンドを前記船舶に提供するように適合された入力デバイスであって、可動操縦桿と、前記操縦桿に力フィードバックを適用するように適合された力フィードバックデバイスとを備えた前記入力デバイスと、
前記近接センサ及び前記入力デバイスと作動可能に接続された船舶制御ユニットと、を備え、前記船舶制御ユニットは、
前記船舶の次の航行の速度値及び方向値を示す前記操縦桿の要求動作を取得することと、
前記周囲において少なくとも前記方向値が示す方向に少なくとも1つの対象物が感知されたことに応答して、前記近接センサから1つ以上の近接信号を取得することと、
前記1つ以上の近接信号に基づいて、前記船舶と前記少なくとも1つの対象物との間の距離を特定することと、
前記特定した距離に基づいて前記操縦桿に力フィードバックを適用するように、前記力フィードバックデバイスを制御することと、
を実行するように構成される、前記航海操縦システム。
続きを表示(約 1,200 文字)
【請求項2】
前記船舶制御ユニットは、さらに、
前記特定した距離に基づいて前記船舶の最大許容速度を計算することと、
前記最大許容速度を、最大許容操縦桿動作に変換することと、
前記最大許容操縦桿動作に基づいて、前記操縦桿の前記要求動作を制限することと、
を実行することにより、前記力フィードバックデバイスを制御するように構成される、請求項1に記載の航海操縦システム。
【請求項3】
前記船舶制御ユニットは、さらに、前記要求動作の力に対抗する力フィードバック値を適用するように前記力フィードバックデバイスを制御することにより、前記操縦桿の前記要求動作を制限するように構成される、請求項2に記載の航海操縦システム。
【請求項4】
前記最大許容速度は、さらに、前記船舶の1つ以上の作動条件に基づく、請求項2に記載の航海操縦システム。
【請求項5】
前記最大許容速度は、さらに、前記船舶が走行している前記周囲の1つ以上の環境条件に基づく、請求項2に記載の航海操縦システム。
【請求項6】
前記船舶制御ユニットは、さらに、前記船舶と前記対象物との間の前記距離が減少しているとき、前記適用する力フィードバックを徐々に増加させるよう前記力フィードバックデバイスを制御するように構成される、請求項1に記載の航海操縦システム。
【請求項7】
前記船舶制御ユニットは、さらに、前記速度値が増加しているとき、前記適用する力フィードバックを徐々に増加させるよう前記力フィードバックデバイスを制御するように構成される、請求項1に記載の航海操縦システム。
【請求項8】
前記適用された力フィードバックは、前記力フィードバックの値を超える前記操縦桿に加えられた外力により、無効にすることができる、請求項1に記載の航海操縦システム。
【請求項9】
前記周囲において少なくとも前記方向値が示す方向に複数の対象物が存在することを前記近接信号が示すと、前記船舶制御ユニットは、
前記船舶と前記複数の対象物のそれぞれとの間の距離を特定することと、
前記特定した距離のそれぞれに基づいて前記操縦桿に力フィードバックを適用するように、前記力フィードバックデバイスを制御することと、
を実行するように構成される、請求項1に記載の航海操縦システム。
【請求項10】
前記操縦桿は3自由度で動かすことが可能であり、前記力フィードバックデバイスは、前記操縦桿の各自由度に関してそれぞれの力フィードバックユニットを備え、前記船舶制御ユニットは、前記力フィードバックユニットのうちの1つ以上を介して、前記操縦桿への前記力フィードバックの前記適用を制御するように構成される、請求項1に記載の航海操縦システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、概して、船舶における航行制御に関する。具体的な態様では、本開示は、船舶操縦桿への力フィードバックの適用制御に関する。本開示は、他の乗り物のタイプの中でも、レジャー用ボート、船、クルーズ船、漁船、ヨット、フェリーなどの船舶に適用することができる。本開示は特定の船舶に関して説明され得るが、本開示はいずれの特定の船舶にも限定されない。
続きを表示(約 2,700 文字)
【背景技術】
【0002】
航海用の電子船舶制御(EVC)システムにおいて、現存している入力デバイスは、通常、使用時に運転者に力フィードバックを提供する能力を有さない機械デバイスである。いくつかの航海用EVCは、船舶の入力デバイスへの力フィードバックの適用を採用しているが、本発明者は、船舶適用における力フィードバックに関して、さらなる改善点を特定した。
【発明の概要】
【0003】
本開示の第1の態様によれば、船舶の航海操縦システムが提供される。航海操縦システムは、船舶を取り囲む周囲の少なくとも一部を感知するように構成された近接センサと、航行コマンドを船舶に提供するように適合された入力デバイスであって、可動操縦桿と、操縦桿に力フィードバックを適用するように適合された力フィードバックデバイスとを備えた当該入力デバイスと、近接センサ及び入力デバイスと作動可能に接続された船舶制御ユニットと、を備え、船舶制御ユニットは、船舶の次の航行の速度値及び方向値を示す操縦桿の要求動作を取得することと、周囲においてで少なくとも方向値が示す方向に少なくとも1つの対象物が感知されたことに応答して、近接センサから1つ以上の近接信号を取得することと、1つ以上の近接信号に基づいて、船舶と少なくとも1つの対象物との間の距離を特定することと、特定した距離に基づいて操縦桿に力フィードバックを適用するように、力フィードバックデバイスを制御することと、を実行するように構成される。本開示の第1の態様は、船舶の操縦者に状況認識を提供することを試み得る。技術的な利点として、周囲の物体のうちの少なくとも1つを検出したことに関連して、船舶の操縦者に対し、操作している操縦桿へ直接的な力フィードバックが与えられることが挙げられ得る。与えられたフィードバックにより、操縦者は、検出された物体に伴い得るリスクを直観的に理解することが可能になり、さらに、要求航行コマンドの効力が自動的に適合され得る。この距離ベースの力フィードバック適用により、船舶及びその操縦者の両方、ならびに周囲の物体のための安全対策が向上し得る。さらに、船舶の操縦者は、船舶の操縦性をより良く理解することができる。
【0004】
任意で、少なくとも1つの好ましい実施例を含むいくつかの実施例では、船舶制御ユニットは、さらに、特定した距離に基づいて船舶の最大許容速度を計算することと、最大許容速度を、最大許容操縦桿動作に変換することと、最大許容操縦桿動作に基づいて、操縦桿の要求動作を制限することと、を実行することにより、力フィードバックデバイスを制御するように構成される。技術的な利点として、許容値に従って要求動作の操縦桿入力が制限されることが挙げられ得、これにより、操縦者は、近くの物体までの距離を直観的に理解することができる。これにより、安全性の向上、及び船舶の操縦性のより良い理解がもたらされ得る。
【0005】
任意で、少なくとも1つの好ましい実施例を含むいくつかの実施例では、船舶制御ユニットは、さらに、操縦桿の要求動作の力に対抗する力フィードバック値を適用するように力フィードバックデバイスを制御することにより、操縦桿の要求動作を制限するように構成される。技術的な利点として、許可されない航行コマンドを要求するリスクがより小さくなり得るように、要求動作の力に対抗することが挙げられ得、これにより、船舶の操縦安全性が向上する。
【0006】
任意で、少なくとも1つの好ましい実施例を含むいくつかの実施例では、船舶制御ユニットは、さらに、船舶と対象物との間の距離が減少しているとき、適用する力フィードバックを徐々に増加させるよう力フィードバックデバイスを制御するように構成される。技術的な利点として、感知された対象物までの現在距離に応じて、操縦者に対し次第に強く(または次第に弱く)警告を行うことが可能になり得る、より直観的な力フィードバックの適用が挙げられ得る。
【0007】
任意で、少なくとも1つの好ましい実施例を含むいくつかの実施例では、船舶制御ユニットは、さらに、速度値が増加しているとき、適用する力フィードバックを徐々に増加させるよう力フィードバックデバイスを制御するように構成される。技術的な利点として、要求されている速度値の高さに応じて、操縦者に対し次第に強く(または次第に弱く)警告を行うことが可能になり得る、より直観的な力フィードバックの適用が挙げられ得る。
【0008】
任意で、少なくとも1つの好ましい実施例を含むいくつかの実施例では、適用された力フィードバックは、力フィードバックの値を超える操縦桿に加えられた外力により、無効にすることができる。技術的な利点として、操縦者が操縦桿の制御を取り戻すことが可能であることが挙げられ得、これは、センサ測定値が誤っている状況、または操縦者がセンサ測定値に依存できない高度な操縦状況において、操縦性を向上させるのに有用であり得る。
【0009】
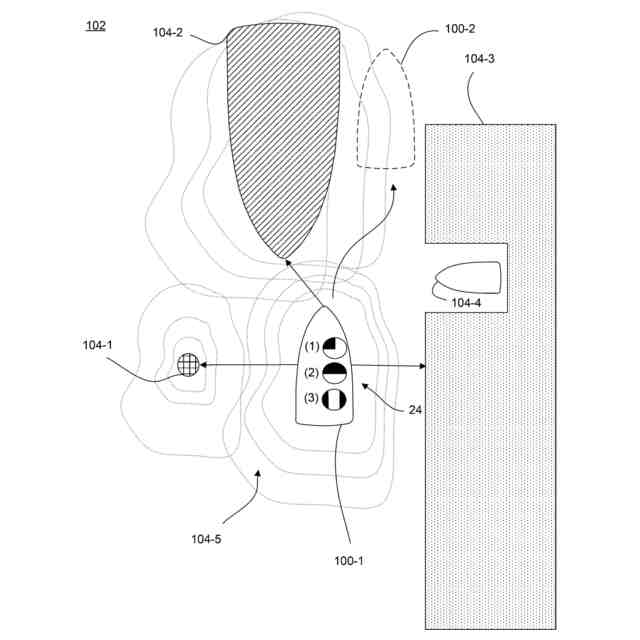
任意で、少なくとも1つの好ましい実施例を含むいくつかの実施例では、周囲において少なくとも方向値が示す方向に複数の対象物が存在することを近接信号が示すと、船舶制御ユニットは、船舶と複数の対象物のそれぞれとの間の距離を特定することと、特定した距離のそれぞれに基づいて操縦桿に力フィードバックを適用するように、力フィードバックデバイスを制御することと、を実行するように構成される。技術的な利点として、複合制御手順で複数の対象物を考慮に入れることが挙げられ得、これにより、係留領域などの多数の対象物が存在する状況において、フィードバック、直観的な理解、及び操縦性が向上し得る。
【0010】
任意で、少なくとも1つの好ましい実施例を含むいくつかの実施例では、操縦桿は3自由度で動かすことが可能であり、力フィードバックデバイスは、操縦桿の各自由度に関してそれぞれの力フィードバックユニットを備え、船舶制御ユニットは、力フィードバックユニットのうちの1つ以上を介して、操縦桿への力フィードバックの適用を制御するように構成される。技術的な利点として、操縦桿の異なる部分が、それぞれの力フィードバックユニットによる力フィードバックに関連付けられた形で、対象物が感知されたことだけでなく、対象物が感知された場所も、操縦者に通知する機会がより多く与えられることが挙げられ得る。これにより、安全対策及び/または船舶の操縦性の理解が、さらに向上し得る。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
水上遊具
1か月前
個人
川下り用船
7か月前
個人
シーアンカー
9か月前
個人
発電船
8か月前
個人
船用横揺防止具
4か月前
個人
補助機構
3か月前
個人
コンパクトシティ船
3か月前
個人
渦流動力推進構造
3か月前
小柳建設株式会社
台船
10か月前
ウラカミ合同会社
曳航ロボット
11か月前
炎重工株式会社
浮標
5か月前
炎重工株式会社
浮標
5か月前
個人
水質浄化・集熱昇温システム
16日前
炎重工株式会社
移動体
8か月前
住友重機械工業株式会社
船舶
11日前
個人
水陸両用移動装置
11か月前
株式会社フルトン
水中捕捉装置
3か月前
個人
スクリュープロペラ
3か月前
個人
船舶
5か月前
株式会社ラフティ
サーフボード
2日前
個人
回転式による流体流出防止タンカー
3か月前
オーケー工業株式会社
係留フック
4か月前
誠加興業股分有限公司
呼吸用マスク
11か月前
スズキ株式会社
船外機
2か月前
スズキ株式会社
船外機
2か月前
ヤマハ発動機株式会社
船外機
5か月前
スズキ株式会社
船外機
3か月前
スズキ株式会社
船外機
3か月前
株式会社テラサン
位置保持システム
9か月前
常石造船株式会社
メタノール燃料船
6か月前
株式会社神戸タフ興産
船舶の甲板構造
7か月前
炎重工株式会社
自律航行浮遊体
5か月前
藤倉コンポジット株式会社
架台
6か月前
株式会社ユピテル
システム及びプログラム等
2か月前
スズキ株式会社
電動船外機
3か月前
スズキ株式会社
船舶推進機
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ