TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025094912
公報種別
公開特許公報(A)
公開日
2025-06-25
出願番号
2024212246
出願日
2024-12-05
発明の名称
パワーステアリングシステムにおけるモータの設定トルクの安定化方法
出願人
ジェイテクト ユーロップ
代理人
弁理士法人前田特許事務所
主分類
B62D
6/00 20060101AFI20250618BHJP(鉄道以外の路面車両)
要約
【課題】パワーステアリングシステムのモータの設定トルクを安定化(保護、安全確保)する。
【解決手段】パワーステアリングシステムの装置にモータートルクを作用させるモータの設定トルク(100)を安定化する方法において、設定トルクの第1中間値を決定する第1決定ステップと、設定トルクの第1中間値の制限値を決定する第2決定ステップと、前の時点で作用した平均モータトルクを表すパラメータを決定する第3決定ステップと、第1中間値、制限値、及び前の時点で作用した平均モータトルクを表すパラメータに基づいて設定トルクの目標値(Ctgs)が決定される安定化ステップと、を有する。
【選択図】図1
特許請求の範囲
【請求項1】
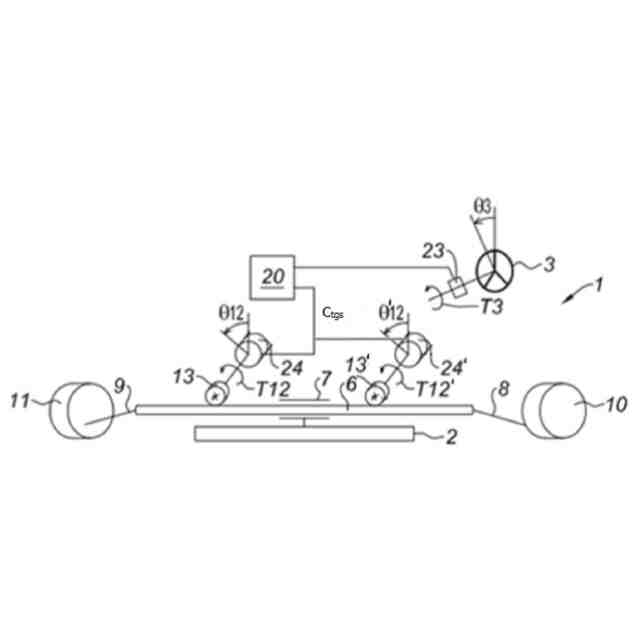
モータ(24、24’)の設定トルクを安定化するために、前記モータ(24、24’)が車両(2)のパワーステアリングシステム(1)の装置(6)にモータトルク(T12,T12’)を作用させて前記装置(6)の角度位置を変更し、少なくとも1つのコントローラ(20)によって実行される安定化方法(100、200)であって、
前記設定トルクの少なくとも1つの第1中間値(C
kp
)が、前記装置(6)の目標角度位置を表す少なくとも1つのパラメータ(P
tg
)と前記装置(6)の角度位置を表す少なくとも1つのパラメータ(P
c
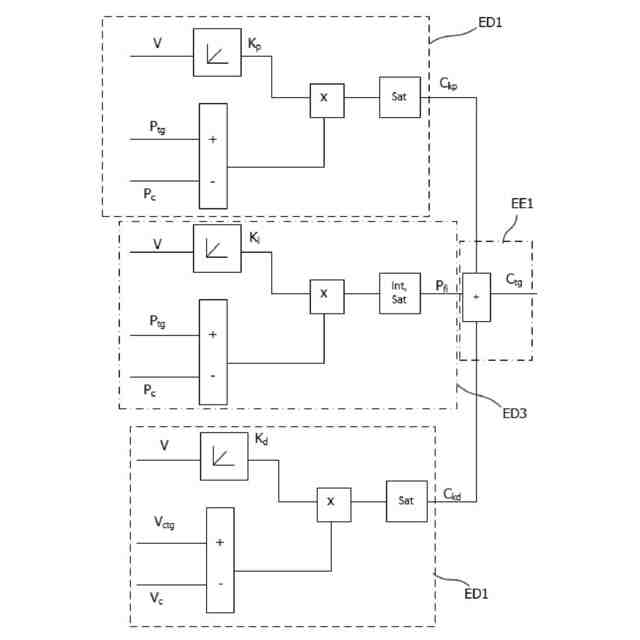
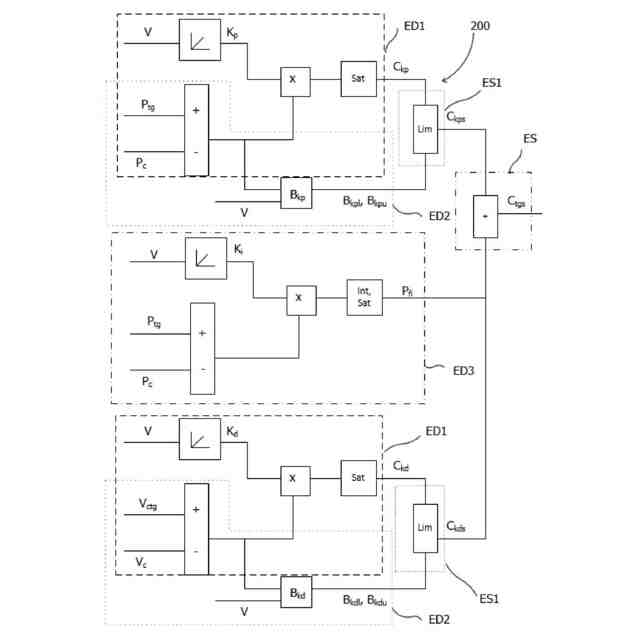
)とに基づいて決定される第1決定ステップ(ED1)と、
前記設定トルクの少なくとも1つの第1中間値(C
kp
)の制限値(B
kpl
、B
kpu
)が、少なくとも設定角度位置を表すパラメータ(P
tg
)と少なくとも前記角度位置を表すパラメータ(P
c
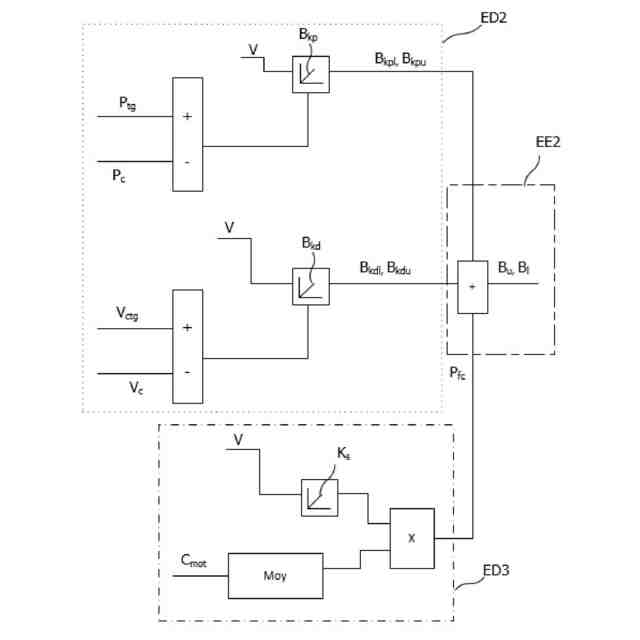
)に基づいて決定される第2決定ステップ(ED2)と、
前の時点で作用した平均モータトルクを表すパラメータ(P
fi
、P
fc
)が決定される第3決定ステップ(ED3)と、
前記設定トルクの目標値(C
tgs
)が、前記設定トルクの少なくとも第1中間値(C
kp
)、前記設定トルクの第1中間値(C
kp
)の制限値(B
kpl
、B
kpu
)、及び前記前の時点で作用した平均モータトルクを表すパラメータ(P
fi
、P
fc
)に基づいて決定される安定化ステップ(ES)と、
を有する安定化方法。
続きを表示(約 2,600 文字)
【請求項2】
請求項1に記載の安定化方法(100,200)において、
前記前の時点で作用した平均モータトルクを表すパラメータ(P
fi
)が、少なくとも前記設定角度位置を表すパラメータ(P
tg
)と少なくとも前記装置(6)の角度位置を表すパラメータ(P
c
)とに基づいて決定される安定化方法(100,200)。
【請求項3】
請求項1に記載の安定化方法(100、200)において、
前記前の時点で作用した平均モータトルクを表すパラメータ(P
fc
)が、前記前の時点の前記設定トルクの目標値(C
tgs
)に基づいて、または前記前の時点で作用したモータトルクを表すパラメータ(C
mot
)の測定値に基づいて決定される安定化方法(100,200)。
【請求項4】
請求項3に記載の安定化方法(100、200)において、
前記前の時点で作用した平均モータトルクを表すパラメータ(P
fc
)が、前記前の時点の設定トルクの目標値(C
tgs
)または前記前の時点で作用したモータトルクを表すパラメータ(C
mot
)の測定値にローパスフィルタ(Moy)を適用することで決定される安定化方法(100,200)。
【請求項5】
請求項1から4のいずれか1項に記載の安定化方法(100、200)において、
前記第1決定ステップ(ED1)が、前記設定トルクの少なくとも1つの第1中間値(C
kp
)を前記車両(2)の速度(V)にも基づいて決定する安定化方法(100,200)。
【請求項6】
請求項1から5のいずれか1項に記載の安定化方法(100、200)において、
前記第2決定ステップ(ED2)が、前記設定トルクの少なくとも1つの第1中間値(C
kp
)の制限値(B
kpl
、B
kpu
)を前記車両(2)の速度(V)に基づいて決定する安定化方法(100、200)。
【請求項7】
請求項1から6のいずれか1項に記載の安定化方法(100)において、
前記設定トルクの暫定値(C
tg
)が、前記設定トルクの少なくとも1つの第1中間値(C
kp
)及び前記前の時点で作用した平均モータトルクを表すパラメータ(P
fi
、P
fc
)に基づいて評価される第1評価ステップ(EE1)と、
前記設定トルクの暫定値(C
tg
)の制限値(B
u
、B
l
)が、前記設定トルクの少なくとも1つの第1中間値(C
kp
)の制限値(B
kpl
、B
kpu
)と前記前の時点で作用した平均モータトルクを表すパラメータ(P
fi
、P
fc
)とに基づいて決定される第2評価ステップ(EE2)と、を有し、
前記安定化ステップ(ES)が、前記設定トルクの目標値(C
tgs
)を、前記設定トルクの少なくとも暫定値(C
tg
)及び前記設定トルクの暫定値(C
tg
)の制限値(B
u
、B
l
)に基づいて決定する安定化方法(100,200)。
【請求項8】
請求項7に記載の安定化方法(100)において、
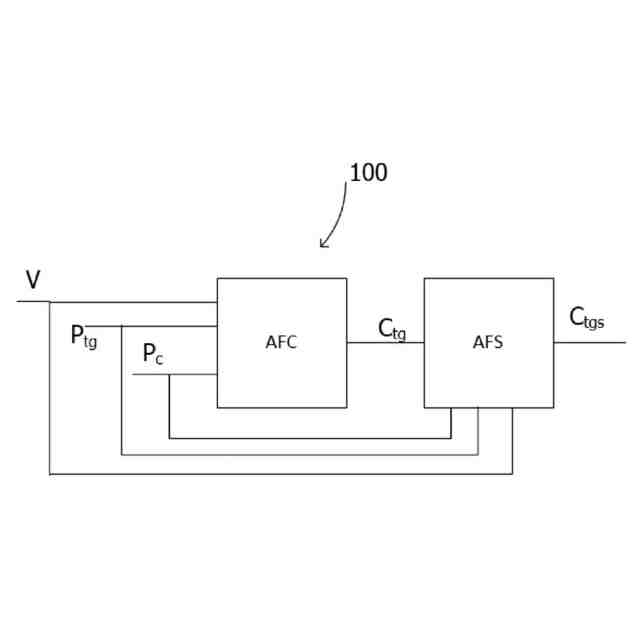
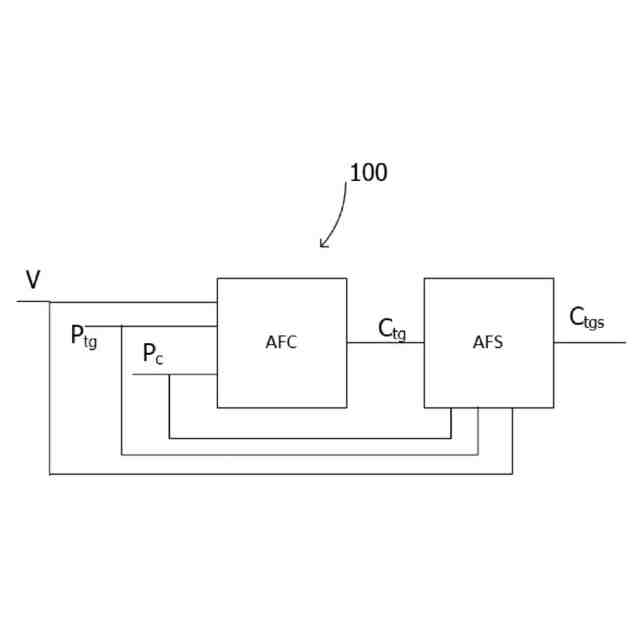
前記第1決定ステップ(ED1)、前記第3決定ステップ(ED3)、及び第1評価ステップ(EE1)が前記装置(6)の位置コントローラ(AFC)によって実行され、前記第2決定ステップ(ED2)、前記第3決定ステップ(ED3)、前記第2評価ステップ(EE2)及び前記安定化ステップ(ES)が、特に前記位置コントローラ(AFC)から前記設定トルクの暫定値(C
tg
)を入力として受ける安定化コントローラ(AFS)によって実行される安定化方法(100,200)。
【請求項9】
請求項1から6のいずれか1項に記載の安定化方法(200)において、
前記設定トルクの少なくとも1つの第1中間値(C
kp
)の少なくとも1つの目標値(C
kps
)が、前記設定トルクの少なくとも1つの第1中間値(C
kp
)と前記設定トルクの少なくとも1つの第1中間値(C
kp
)の制限値(B
kpl
、B
kpu
)とに基づいて決定される第1安定化ステップ(ES1)を有し、
前記安定化ステップ(ES)が、前記設定トルクの目標値(C
tgs
)を、前記設定トルクの少なくとも1つの第1中間値(C
kp
)の少なくとも目標値(C
kps
)と前記前の時点で作用した平均モータトルクを表すパラメータ(P
fi
、P
fc
)とに基づいて決定する安定化方法(100,200)。
【請求項10】
請求項1から9のいずれか1項に記載の安定化方法(100、200)において、
前記第1決定ステップ(ED1)が、前記装置(6)の設定速度を表す少なくとも一つのパラメータ(V
ctg
)と前記装置(6)の速度を表すパラメータ(V
c
)とに基づいて前記設定トルクの第2中間値(C
kd
)も決定し、前記第2決定ステップ(ED2)が、少なくとも前記装置(6)の設定速度を表すパラメータ(V
ctg
)と前記装置(6)の速度を表すパラメータ(V
c
)とに基づいて前記設定トルクの第2中間値(C
kd
)の制限値(B
kdl
、B
kdu
)も決定する安定化方法(100,200)。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、パワーステアリングシステムを備えた車両の分野に関し、より詳細にはモータの設定トルクの安定化方法に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
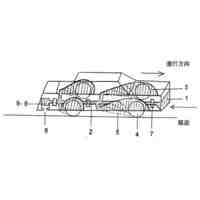
車両のステアリングシステムは、運転者がステアリングホイールによって車両の車輪の方向角度を変更することで車両の軌道を制御可能にすることを目的としている。運転者はステアリングホイールに力を加えることでステアリングホイールの角度を変更する。
【0003】
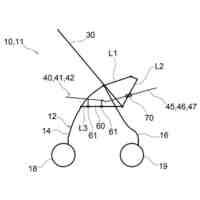
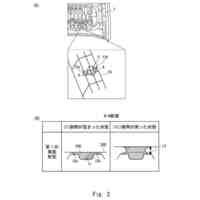
一般に、ステアリングシステムは、前記ステアリングホイール、ラック、及びそれぞれがコネクティングロッド(タイロッド)に接続された2つの車輪を含む複数の構成要素を有している。ラックは、コネクティングロッドを介して車輪の操作を可能にする部品、つまり車輪の方向角度の変更を可能にする部品である。ステアリングケースに対するラックの角度位置を以下では「ラック角度位置」と称するが、これは車輪の方向角度を反映したものである。
【0004】
「ステアバイワイヤ」と呼ばれる機械的な接続のない電動パワーステアリングシステムでは、ステアリングホイールはラックから機械的に切り離されている。この場合、ステアリングシステムは、ラックユニットから機械的に独立したステアリングホイールユニットを有する。言い換えると、ステアリングホイールユニットに加えられる力はラックユニットに機械的に伝達されず、その逆も同様である。
【0005】
ステアリングホイールユニットは、前記ステアリングホイールと、前記ステアリングホイールの角度を推定する少なくとも一つの手段、例えば角度センサとを有する。
【0006】
ラックユニットは、ステアリングケース内で移動可能な前記ラックと、特にラックの角度位置を設定角度位置(目標角度位置)と一致するように制御する少なくとも1つの電子コントロールユニットとを有する。設定角度位置は一般にステアリングホイール角度と一致するが、軌道追尾機能または車両駐車支援機能などの車両の機能により変更してもよい。
【0007】
電子コントロールユニットは、ラックにモータトルクを作用させる少なくとも1つのモータを制御するために、設定モータトルク(または以下では設定トルク)を決定する。言い換えると、コントローラはモータの設定トルクを決定することによって、ラックの角度位置を設定角度位置にサーボ制御する。
【0008】
車両の安全性を保証するためには、コントローラの適切な動作、特にラックの確実な位置制御が重要であり、それによって設定角度位置とラック角度位置との整合性を確保できるようになる。
【0009】
ラックユニットの故障(誤動作)を検出可能にする既知の解決策がある。ラックユニットの故障は、ラックの角度位置と設定角度位置との差として定義される。誤動作(機能不良)が検出されると、バックアップコントローラによってサーボ制御が実行される。
【発明の概要】
【発明が解決しようとする課題】
【0010】
この解決策の欠点は、誤動作の原因を判別できないことである。したがって、ラックの角度位置と設定角度位置との差がコントローラの故障によるものか、または車輪のロックなどの他の原因によるものかを判断することができない。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
走行装置
11日前
個人
乗り物
1か月前
個人
電動走行車両
11日前
個人
電動モビリティ
4か月前
個人
閂式ハンドル錠
11日前
個人
発音装置
3か月前
個人
折り畳み自転車
7か月前
個人
自転車用傘捕捉具
8か月前
個人
体重掛けリフト台車
7か月前
個人
自由方向乗車自転車
4か月前
個人
アタッチメント
8か月前
個人
自転車用荷物台
7か月前
個人
キャンピングトライク
5か月前
株式会社CPM
駐輪機
8か月前
個人
ステアリングの操向部材
5か月前
個人
フロントフットブレーキ。
18日前
株式会社三五
リアサブフレーム
7か月前
株式会社豊田自動織機
産業車両
1か月前
学校法人千葉工業大学
車両
6か月前
学校法人千葉工業大学
車両
6か月前
個人
ホイールハブ駆動構造
28日前
ヤマハ発動機株式会社
車両
8か月前
学校法人千葉工業大学
車両
6か月前
ヤマハ発動機株式会社
車両
8か月前
豊田合成株式会社
操舵装置
8か月前
ダイハツ工業株式会社
車両
9か月前
ヤマハ発動機株式会社
車両
8か月前
ヤマハ発動機株式会社
車両
8か月前
株式会社カインズ
台車
4か月前
株式会社GEAR
電動カート
1か月前
株式会社カインズ
台車
7か月前
個人
走行車両等の粉塵飛散防止装置
11日前
コンビ株式会社
乳母車
2か月前
株式会社オカムラ
搬送用什器
4か月前
株式会社クボタ
作業車
2か月前
トヨタ自動車株式会社
パネル
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ