TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025094824
公報種別
公開特許公報(A)
公開日
2025-06-25
出願番号
2023210596
出願日
2023-12-13
発明の名称
制御システム及び制御方法
出願人
いすゞ自動車株式会社
代理人
弁理士法人創光国際特許事務所
主分類
B62D
6/00 20060101AFI20250618BHJP(鉄道以外の路面車両)
要約
【課題】車両の目標経路への追従性を向上する。
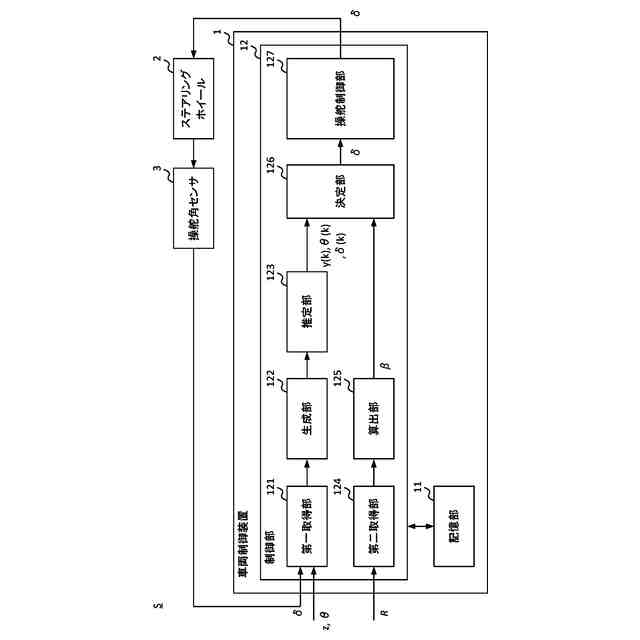
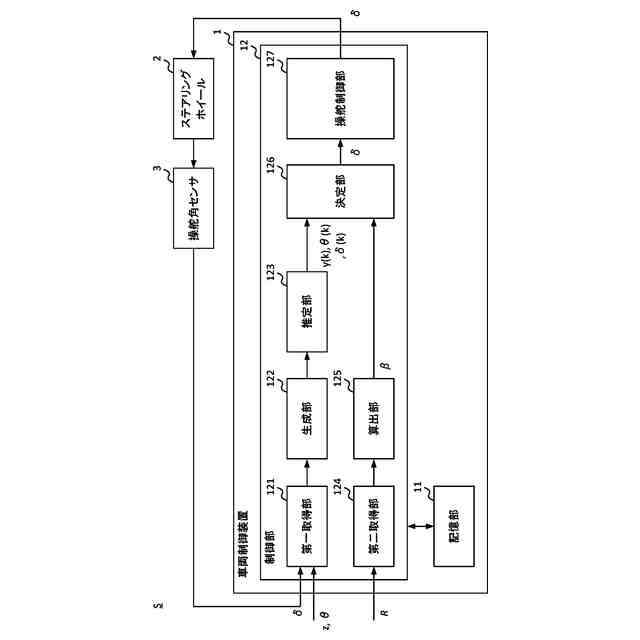
【解決手段】制御システムSは、車両の目標経路の経路点と車両との距離偏差、経路点の第一方位角と車両の第二方位角との方位角偏差、及び車両の操舵角を取得する第一取得部121と、距離偏差、方位角偏差及び操舵角の各々を予測する予測モデルを生成する生成部122と、車両が走行中の道路の曲がり度合いを取得する第二取得部124と、曲がり度合いに基づいて車両の横滑り角を算出する算出部125と、予測モデルに基づいて、推定距離偏差と、操舵角と、推定方位角偏差とを推定する推定部123と、推定方位角偏差と横滑り角との差、推定距離偏差及び操舵角をパラメータに含む評価関数を最小化する操舵角を目標操舵角に決定する決定部126と、を有する。
【選択図】図2
特許請求の範囲
【請求項1】
車両の目標経路の経路点と前記車両との距離偏差、前記経路点の第一方位角と前記車両の第二方位角との方位角偏差、及び前記車両の操舵角を取得する第一取得部と、
前記距離偏差、前記方位角偏差及び前記操舵角の各々を予測する予測モデルを生成する生成部と、
前記車両が走行中の道路の曲がり度合いを取得する第二取得部と、
前記曲がり度合いに基づいて前記車両の横滑り角を算出する算出部と、
前記予測モデルに基づいて、推定距離偏差と、操舵角と、推定方位角偏差とを推定する推定部と、
前記推定方位角偏差と前記横滑り角との差、前記推定距離偏差及び前記操舵角をパラメータに含む評価関数を最小化する前記操舵角を目標操舵角に決定する決定部と、
を有する制御システム。
続きを表示(約 1,200 文字)
【請求項2】
前記算出部は、前記曲がり度合いに応じて定まる前記車両の進行方向に直交する車幅方向の力のつり合いと、前記車両の重心周りの回転方向の力のつり合いと、に基づいて前記横滑り角を算出する、
請求項1に記載の制御システム。
【請求項3】
前記車幅方向の力のつり合いは、
前記車両の重量、前記車両の車速及び前記曲がり度合いにより定まる遠心力と、
前記車両の前輪コーナリングスティフネス、前記車両の前輪の横滑り角、前記車両の後輪コーナリングスティフネス及び前記車両の後輪の横滑り角により定まる向心力と、
で表され、
前記回転方向の力のつり合いは、
前記車両の重心と前記前輪との第一距離、前記前輪コーナリングスティフネス及び前記前輪の横滑り角により定まる前記前輪のヨーモーメントと、
前記重心と前記後輪との第二距離、前記後輪コーナリングスティフネス及び前記後輪の横滑り角により定まる前記後輪のヨーモーメントとで表される、
請求項2に記載の制御システム。
【請求項4】
前記遠心力は、前記曲がり度合いを示す曲率半径に対する前記車速の二乗の割合と前記重量との積で表され、
前記向心力は、前記前輪コーナリングスティフネス及び前記前輪の横滑り角の積と、前記後輪コーナリングスティフネス及び前記後輪の横滑り角の積との和とで表され、
前記回転方向の力のつり合いは、前記第一距離、前記前輪コーナリングスティフネス及び前記前輪の横滑り角の第一積と、前記第二距離、前記後輪コーナリングスティフネス及び前記後輪の横滑り角の第二積と、で表される、
請求項3に記載の制御システム。
【請求項5】
前記算出部は、前記遠心力と前記向心力とで表される前記車幅方向の力のつり合いを表す式と、前記第一積と前記第二積とで表される前記回転方向の力のつり合いを表す式とから、前記前輪横滑り角を消去することで導出される前記後輪の横滑り角を、前記横滑り角として算出する、
請求項4に記載の制御システム。
【請求項6】
車両に搭載されたプロセッサが実行する、
前記車両の目標経路の経路点と前記車両との距離偏差、前記経路点の第一方位角と前記車両の第二方位角との方位角偏差、及び前記車両の操舵角を取得するステップと、
前記距離偏差、前記方位角偏差及び前記操舵角の各々を予測する予測モデルを生成するステップと、
前記車両が走行中の道路の曲がり度合いを取得するステップと、
前記曲がり度合いに基づいて前記車両の横滑り角を算出するステップと、
前記予測モデルに基づいて、推定距離偏差と、操舵角と、推定方位角偏差とを推定するステップと、
前記推定方位角偏差と前記横滑り角との差、前記推定距離偏差及び前記操舵角をパラメータに含む評価関数を最小化する前記操舵角を目標操舵角に決定するステップと、
を有する制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両の挙動を制御する制御システム及び制御方法に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
車両の挙動を制御する制御システムが知られている。特許文献1には、横偏差と、方位角偏差と、操舵角と、操舵角の変化量とを含む評価関数の値を最小化する操舵角を決定する技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2023-140494号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、車両が旋回する際には、車両の進行方向と車輪の向きとの間に横滑り角が生じることで旋回している。そのため、曲率が大きい目標経路に沿って車両を走行させる場合には、車両の車輪の向きである操舵角を、車両が目標経路に沿うような横滑り角が生じる角度にする必要がある。しかし、横滑り角を考慮しないで決定された車両の操舵角により生じる横滑り角は、車両を目標経路に沿って旋回させる横滑り角と異なることがある。そのため、横滑り角が考慮されていない操舵角では目標経路から外れるように車両が旋回し、目標経路に車両が追従できなくなっていた。
【0005】
そこで、本発明はこれらの点に鑑みてなされたものであり、車両の目標経路への追従性を向上することを目的とする。
【課題を解決するための手段】
【0006】
本発明の第1の態様においては、車両の目標経路の経路点と前記車両との距離偏差、前記経路点の第一方位角と前記車両の第二方位角との方位角偏差、及び前記車両の操舵角を取得する第一取得部と、前記距離偏差、前記方位角偏差及び前記操舵角の各々を予測する予測モデルを生成する生成部と、前記車両が走行中の道路の曲がり度合いを取得する第二取得部と、前記曲がり度合いに基づいて前記車両の横滑り角を算出する算出部と、前記予測モデルに基づいて、推定距離偏差と、操舵角と、推定方位角偏差とを推定する推定部と、前記推定方位角偏差と前記横滑り角との差、前記推定距離偏差及び前記操舵角をパラメータに含む評価関数を最小化する前記操舵角を目標操舵角に決定する決定部と、を有する制御システムを提供する。
前記算出部は、前記曲がり度合いに応じて定まる前記車両の進行方向に直交する車幅方向の力のつり合いと、前記車両の重心周りの回転方向の力のつり合いと、に基づいて前記横滑り角を算出してもよい。
【0007】
前記車幅方向の力のつり合いは、前記車両の重量、前記車両の車速及び前記曲がり度合いにより定まる遠心力と、前記車両の前輪コーナリングスティフネス、前記車両の前輪の横滑り角、前記車両の後輪コーナリングスティフネス及び前記車両の後輪の横滑り角により定まる向心力と、で表され、前記回転方向の力のつり合いは、前記車両の重心と前記前輪との第一距離、前記前輪コーナリングスティフネス及び前記前輪の横滑り角により定まる前記前輪のヨーモーメントと、前記重心と前記後輪との第二距離、前記後輪コーナリングスティフネス及び前記後輪の横滑り角により定まる前記後輪のヨーモーメントとで表されてもよい。
【0008】
前記遠心力は、前記曲がり度合いを示す曲率半径に対する前記車速の二乗の割合と前記重量との積で表され、前記向心力は、前記前輪コーナリングスティフネス及び前記前輪の横滑り角の積と、前記後輪コーナリングスティフネス及び前記後輪の横滑り角の積との和とで表され、前記回転方向の力のつり合いは、前記第一距離、前記前輪コーナリングスティフネス及び前記前輪の横滑り角の第一積と、前記第二距離、前記後輪コーナリングスティフネス及び前記後輪の横滑り角の第二積と、で表されてもよい。
【0009】
前記算出部は、前記遠心力と前記向心力とで表される前記車幅方向の力のつり合いを表す式と、前記第一積と前記第二積とで表される前記回転方向の力のつり合いを表す式とから、前記前輪横滑り角を消去することで導出される前記後輪の横滑り角を、前記横滑り角として算出してもよい。
【0010】
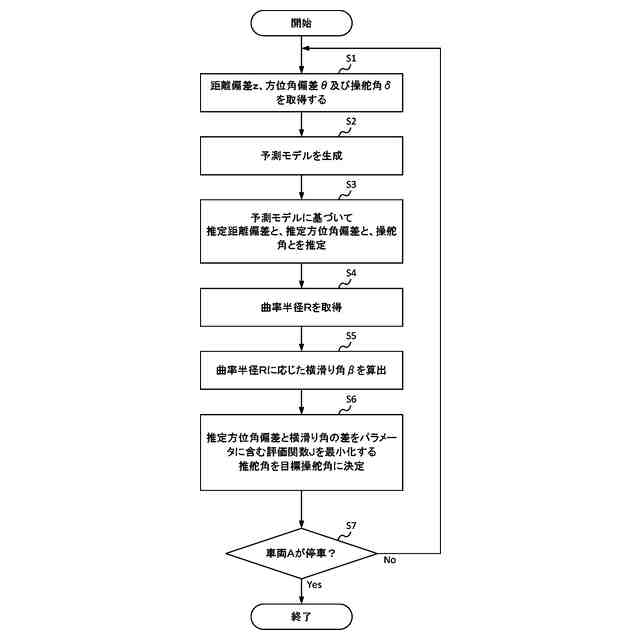
本発明の第2の態様においては、車両に搭載されたプロセッサが実行する、前記車両の目標経路の経路点と前記車両との距離偏差、前記経路点の第一方位角と前記車両の第二方位角との方位角偏差、及び前記車両の操舵角を取得するステップと、前記距離偏差、前記方位角偏差及び前記操舵角の各々を予測する予測モデルを生成するステップと、前記車両が走行中の道路の曲がり度合いを取得するステップと、前記曲がり度合いに基づいて前記車両の横滑り角を算出するステップと、前記予測モデルに基づいて、推定距離偏差と、操舵角と、推定方位角偏差とを推定するステップと、前記推定方位角偏差と前記横滑り角との差、前記推定距離偏差及び前記操舵角をパラメータに含む評価関数を最小化する前記操舵角を目標操舵角に決定するステップと、を有する制御方法を提供する。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
走行装置
13日前
個人
電動走行車両
13日前
個人
乗り物
1か月前
個人
閂式ハンドル錠
13日前
個人
電動モビリティ
4か月前
個人
折り畳み自転車
7か月前
個人
発音装置
4か月前
個人
自転車用傘捕捉具
8か月前
個人
自由方向乗車自転車
4か月前
個人
体重掛けリフト台車
7か月前
個人
アタッチメント
8か月前
個人
自転車用荷物台
7か月前
個人
キャンピングトライク
5か月前
個人
ステアリングの操向部材
5か月前
株式会社CPM
駐輪機
8か月前
三甲株式会社
台車
10か月前
株式会社三五
リアサブフレーム
7か月前
三甲株式会社
台車
10か月前
個人
フロントフットブレーキ。
20日前
株式会社豊田自動織機
産業車両
1か月前
学校法人千葉工業大学
車両
6か月前
ダイハツ工業株式会社
車両
9か月前
学校法人千葉工業大学
車両
6か月前
豊田合成株式会社
操舵装置
8か月前
学校法人千葉工業大学
車両
6か月前
個人
ホイールハブ駆動構造
1か月前
ヤマハ発動機株式会社
車両
8か月前
ヤマハ発動機株式会社
車両
8か月前
ヤマハ発動機株式会社
車両
8か月前
ヤマハ発動機株式会社
車両
8か月前
株式会社クボタ
作業車
3か月前
株式会社GEAR
電動カート
1か月前
個人
走行車両等の粉塵飛散防止装置
13日前
個人
自転車の駐輪場システム
2か月前
株式会社オカムラ
搬送用什器
4か月前
株式会社カインズ
台車
7か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ