TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025090163
公報種別
公開特許公報(A)
公開日
2025-06-17
出願番号
2023205223
出願日
2023-12-05
発明の名称
移動体群制御装置、移動体群制御システムおよび移動体群制御方法
出願人
株式会社日立製作所
代理人
弁理士法人開知
主分類
G05D
1/69 20240101AFI20250610BHJP(制御;調整)
要約
【課題】移動体の全体効率を向上させることが可能な移動体群制御装置、移動体群制御システムおよび移動体群制御方法を提供する。
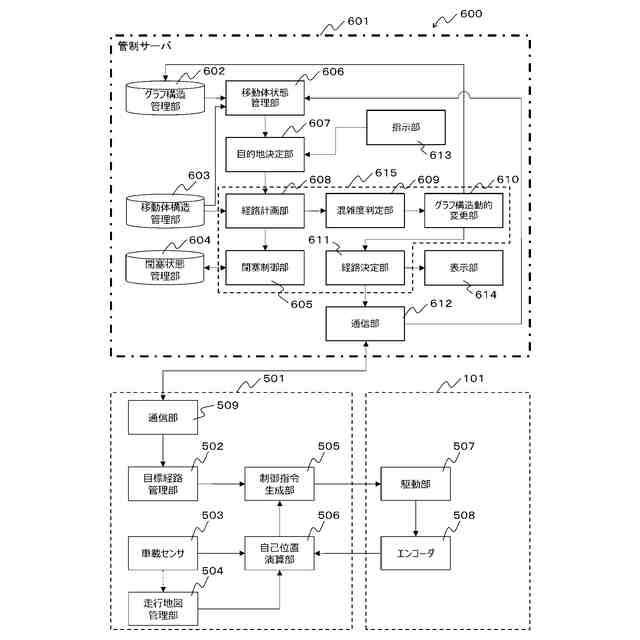
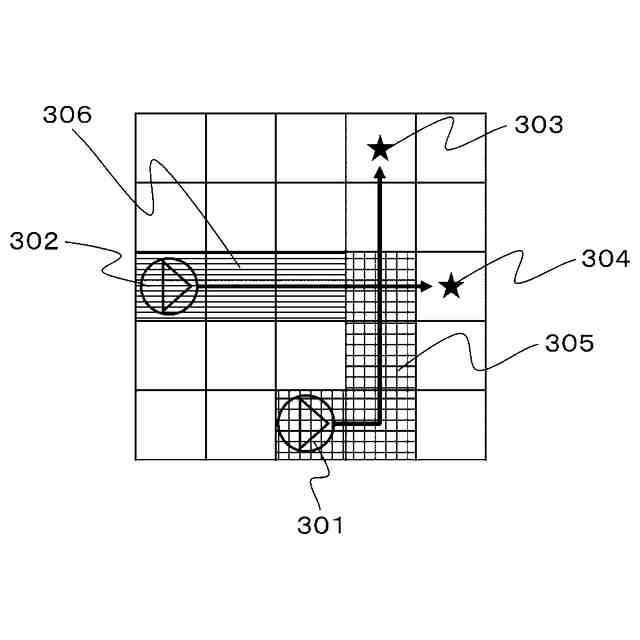
【解決手段】移動経路作成部615は、複数の移動体101の移動空間200の全領域に所定の事前移動ルールを適用した上で、複数の移動体101の目的地までの暫定移動経路を作成し、複数の移動体101が前記暫定移動経路に沿って移動した場合の移動予測結果を所定の評価項目に基づいて評価し、前記移動予測結果の評価結果に基づいて、移動空間200のうち前記事前移動ルールとは異なる特別移動ルールを適用する領域を特別領域1201として設定し、特別領域1201に前記特別移動ルールを適用し且つ移動空間200のうち特別領域1201以外の領域に前記事前移動ルールを適用した上で、複数の移動体101の前記目的地までの移動経路を作成する。
【選択図】 図6
特許請求の範囲
【請求項1】
複数の移動体を制御する移動体群制御装置において、
前記複数の移動体の目的地を決定する目的地決定部と、
前記複数の移動体の前記目的地までの移動経路を作成する移動経路作成部と、
前記移動経路を前記複数の移動体に送信する通信部とを備え、
前記移動経路作成部は、
前記複数の移動体の移動空間の全領域に所定の事前移動ルールを適用した上で、前記複数の移動体の前記目的地までの暫定移動経路を作成し、
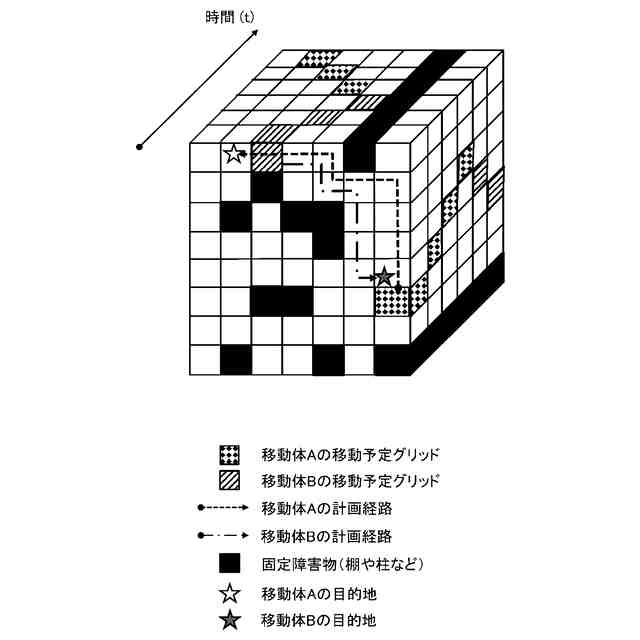
前記複数の移動体が前記暫定移動経路に沿って移動した場合の移動予測結果を所定の評価項目に基づいて評価し、
前記移動予測結果の評価結果に基づいて、前記移動空間のうち前記事前移動ルールとは異なる特別移動ルールを適用する領域を特別領域として設定し、
前記特別領域に前記特別移動ルールを適用し且つ前記移動空間のうち前記特別領域以外の領域に前記事前移動ルールを適用した上で、前記移動経路を作成する
ことを特徴とする移動体群制御装置。
続きを表示(約 1,400 文字)
【請求項2】
請求項1に記載の移動体群制御装置において、
前記移動経路作成部は、
前記移動予測結果の評価結果に基づいて、前記複数の移動体のうち2台以上の移動体が所定の時間枠内で通過すると予想される混雑予想地点を抽出し、
前記混雑予想地点を含む予想混雑領域を前記特別領域として設定する
ことを特徴とする移動体群制御装置。
【請求項3】
請求項2に記載の移動体群制御装置において、
前記特別移動ルールには、前記予想混雑領域における特定方向の経路の通過を不可とする移動方向制約を設定することが含まれる
ことを特徴とする移動体群制御装置。
【請求項4】
請求項3に記載の移動体群制御装置において、
前記移動経路作成部は、前記複数の移動体のうち特定の移動体のみに対して前記移動方向制約を設定する
ことを特徴とする移動体群制御装置。
【請求項5】
請求項3に記載の移動体群制御装置において、
前記移動経路作成部は、前記予想混雑領域の発生予測時刻から所定の時間が経過した後に前記移動方向制約の設定を解除する
ことを特徴とする移動体群制御装置。
【請求項6】
請求項1に記載の移動体群制御装置において、
前記所定の評価項目は、前記複数の移動体の移動コストであり、
前記移動経路作成部は、
前記特別移動ルールを変化させつつ複数の移動経路候補を作成し、
前記複数の移動経路候補のうち前記移動コストが最小となる移動経路候補を前記移動経路として選択する
ことを特徴とする移動体群制御装置。
【請求項7】
請求項6に記載の移動体群制御装置において、
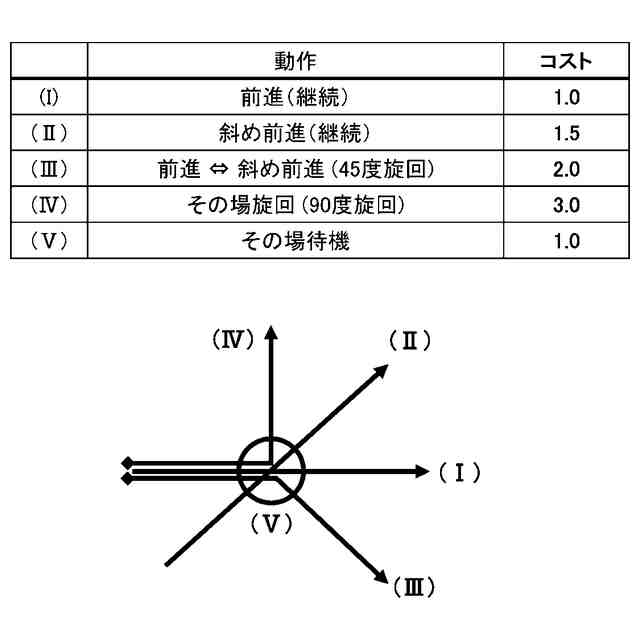
前記移動経路作成部は、前記複数の移動体が前記暫定移動経路に沿って移動する際の各動作に要する時間を合計することにより前記移動コストを算出する
ことを特徴とする移動体群制御装置。
【請求項8】
請求項1に記載の移動体群制御装置において、
前記複数の移動体の運行状況を表示する表示部を備える
ことを特徴とする移動体群制御装置。
【請求項9】
請求項1に記載の移動体群制御装置と、
前記複数の移動体とを備える
ことを特徴とする移動体群制御システム。
【請求項10】
複数の移動体を制御する移動体群制御方法において、
前記複数の移動体の目的地を決定する第1手順と、
前記複数の移動体の移動空間の全領域に所定の事前移動ルールを適用した上で、前記複数の移動体の前記目的地までの暫定移動経路を作成する第2手順と、
前記複数の移動体が前記暫定移動経路に沿って移動した場合の移動予測結果を所定の評価項目に基づいて評価する第3手順と、
前記第3手順の評価結果に基づいて、前記移動空間のうち前記事前移動ルールとは異なる特別移動ルールを適用する領域を特別領域として設定する第4手順と、
前記特別領域に前記特別移動ルールを適用し且つ前記移動空間のうち前記特別領域以外の領域に前記事前移動ルールを適用した上で、前記複数の移動体の前記目的地までの移動経路を作成する第5手順とを備える
ことを特徴とする移動体群制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、複数の移動体を制御する移動体群制御装置、移動体群制御システムおよび移動体群制御方法に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
少子高齢化による労働力不足やEコマース市場の拡大に伴い、物流倉庫内や工場内の省人化、作業効率の向上が課題となっている。これら課題を解決するため、無人搬送車(AGV:Automated Guided Vehicle)などの複数の移動体を効率よく動作させる移動体群制御システムの導入が進められている。
【0003】
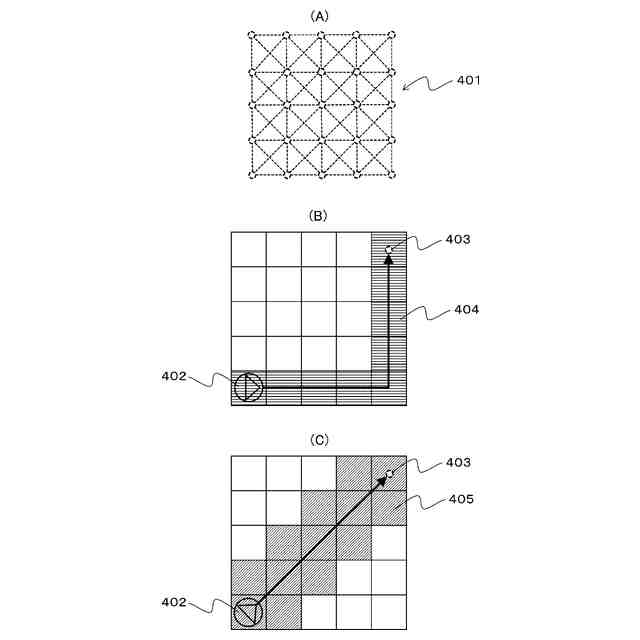
これまでの移動体群制御システムは、全移動体の制御に要する演算コストや移動体同士の衝突回避に鑑み、空間を四角形のグリッドで区切り、移動体は上下左右グリッドへの直進とその場旋回のみで移動する方式が一般的であった。この際、全移動体の位置を一つの管制サーバ(ホストコンピュータ)を用いて管理し、全移動体の目的地までの経路を逐次演算する集中型の経路計画機能が基本構成となる。
【0004】
経路計画機能には、移動体同士の衝突・干渉を回避しつつ、全体効率を最適化することが求められる。具体事例として、特許文献1の移動体制御装置では、経路計画の演算を、移動経路および移動工程を入力とし、制約条件を満たしつつ所定の評価値を最小化することを目的とする混合整数計画問題として捉えている。制約条件に衝突禁止条件を追加し、評価値を最小化することで、移動体同士の衝突を回避した上で、全移動体の移動経路を最短にする搬送スケジュールの計算を可能としている。
【先行技術文献】
【特許文献】
【0005】
特開2023-72447号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1では、移動空間全体で同一のルール(制約条件)が設定されている。より具体的には、移動空間のいずれの経路においても、他の移動体の侵入予定が無い場合は、当該経路を走行可能としている。この場合、1つの移動体が当該経路を占有することで、当該経路の周辺で他の移動体が過度な迂回や待機を強いられる場合がある。そのため、特許文献1の移動体制御装置は、全体効率の最適化の観点で改善の余地がある。
【0007】
本発明は、上記の課題に鑑みてなされたものであり、その目的は、移動体の全体効率を向上させることが可能な移動体群制御装置、移動体群制御システムおよび移動体群制御方法を提供することにある。
【課題を解決するための手段】
【0008】
上記目的を達成するために、本発明は、複数の移動体を制御する移動体群制御装置において、前記複数の移動体の目的地を決定する目的地決定部と、前記複数の移動体の前記目的地までの移動経路を作成する移動経路作成部と、前記移動経路を前記複数の移動体に送信する通信部とを備え、前記移動経路作成部は、前記複数の移動体の移動空間の全領域に所定の事前移動ルールを適用した上で、前記複数の移動体の前記目的地までの暫定移動経路を作成し、前記複数の移動体が前記暫定移動経路に沿って移動した場合の移動予測結果を所定の評価項目に基づいて評価し、前記移動予測結果の評価結果に基づいて、前記移動空間のうち前記事前移動ルールとは異なる特別移動ルールを適用する領域を特別領域として設定し、前記特別領域に前記特別移動ルールを適用し且つ前記移動空間のうち前記特別領域以外の領域に前記事前移動ルールを適用した上で、前記移動経路を作成するものとする。
【0009】
また、本発明は、複数の移動体を制御する移動体群制御システムにおいて、複数の移動体と、前記移動体群制御装置とを備えるものとする。
【0010】
また、本発明は、複数の移動体を制御する移動体群制御方法において、前記複数の移動体の目的地を決定する第1手順と、前記複数の移動体の移動空間の全領域に所定の事前移動ルールを適用した上で、前記複数の移動体の前記目的地までの暫定移動経路を作成する第2手順と、前記複数の移動体が前記暫定移動経路に沿って移動した場合の移動予測結果を所定の評価項目に基づいて評価する第3手順と、前記第3手順の評価結果に基づいて、前記移動空間のうち前記事前移動ルールとは異なる特別移動ルールを適用する領域を特別領域として設定する第4手順と、前記特別領域に前記特別移動ルールを適用し且つ前記移動空間のうち前記特別領域以外の領域に前記事前移動ルールを適用した上で、前記複数の移動体の前記目的地までの移動経路を作成する第5手順とを備えるものとする。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
エイブリック株式会社
基準電圧回路
2か月前
ローム株式会社
半導体集積回路
8日前
トヨタ自動車株式会社
ペダル機構
25日前
株式会社ダイフク
搬送設備
26日前
三栄ハイテックス株式会社
基準電圧回路
11日前
三菱電機株式会社
自己位置推定装置
1か月前
トヨタ自動車株式会社
移動体、及び制御方法
1か月前
株式会社やまびこ
走行制御装置
1か月前
株式会社ダイフク
物品搬送設備
7日前
株式会社戸張空調
アクセル・ブレーキ操作装置
4日前
株式会社タブチ
減圧弁
1か月前
株式会社計数技研
移動体、及びプログラム
26日前
WHILL株式会社
電動モビリティ
1か月前
株式会社ダイヘン
搬送車
2か月前
株式会社ダイヘン
搬送車
2か月前
株式会社ダイヘン
搬送車
2か月前
株式会社ダイヘン
搬送車
2か月前
ローム株式会社
半導体装置
14日前
日本信号株式会社
自走式装置
1か月前
株式会社ダイヘン
搬送車
1か月前
井関農機株式会社
作業車両
2か月前
株式会社デンソー
診断装置
1か月前
株式会社ダイヘン
移動体、及び誘導線検出装置
18日前
株式会社ダイヘン
移動体、及び誘導線検出装置
18日前
株式会社アイシン
自律移動体
1か月前
株式会社大林組
作業機械の自動運転制御システム
7日前
株式会社アイシン
自律移動体
1か月前
株式会社豊田自動織機
無人搬送車両
1日前
株式会社アイシン
自律移動体
1か月前
エイブリック株式会社
ボルテージレギュレータ及び半導体装置
8日前
FCLコンポーネント株式会社
電源回路および検出装置
1か月前
株式会社アイシン
自律移動体
1か月前
株式会社ダイヘン
情報処理装置
1か月前
三菱電機株式会社
状態推定装置及び移動体制御装置
1か月前
横河電機株式会社
電流出力装置
27日前
株式会社東海理化電機製作所
ペダル装置
21日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ