TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025087095
公報種別
公開特許公報(A)
公開日
2025-06-10
出願番号
2023201511
出願日
2023-11-29
発明の名称
作業機械、及び作業機械の操作制御システム
出願人
住友建機株式会社
代理人
個人
,
個人
主分類
E02F
9/22 20060101AFI20250603BHJP(水工;基礎;土砂の移送)
要約
【課題】操作性の向上を実現する。
【解決手段】本開示の一態様に係る作業機械は、下部走行体と、前記下部走行体に旋回自在の搭載される上部旋回体と、所定の作業が行われたと判定された時点における前記上部旋回体の旋回角度を、目標角度として設定し、旋回操作を受け付けた際、前記上部旋回体の旋回角度が当該目標角度に略一致した時に旋回を停止させるように構成されている制御部と、を備える。
【選択図】図2
特許請求の範囲
【請求項1】
下部走行体と、
前記下部走行体に旋回自在の搭載される上部旋回体と、
所定の作業が行われたと判定された時点における前記上部旋回体の旋回角度を、目標角度として設定し、旋回操作を受け付けた際、前記上部旋回体の旋回角度が当該目標角度に略一致した時に旋回を停止させるように構成されている制御部と、
を備える作業機械。
続きを表示(約 1,000 文字)
【請求項2】
前記上部旋回体に取り付けられるアタッチメントをさらに備え、
前記所定の作業は、前記アタッチメントに積載された物体の排出、又は前記アタッチメントを用いた掘削である、
請求項1に記載の作業機械。
【請求項3】
前記制御部は、前記目標角度を表す情報を、表示装置に表示するように構成されている、
請求項1に記載の作業機械。
【請求項4】
前記制御部は、前記作業機械を上から見た外観を表したアイコンを前記表示装置に表示し、前記作業機械の動作に従って前記アイコンの表示態様を変化させると共に、前記作業機械の作業内容を表す表示情報を表示する、
請求項3に記載の作業機械。
【請求項5】
前記制御部は、所定の処理を開始させる第1操作を受け付けた後、第2操作に従って前記作業機械が動作する際に、前記所定の作業が行われたと判定された場合に、判定された時点における旋回角度を、前記目標角度として設定する、
請求項1に記載の作業機械。
【請求項6】
前記制御部は、前記目標角度が設定された後、第3の操作を受け付けている間に、前記旋回操作を受け付けた際に、前記上部旋回体の旋回を前記目標角度で停止させるように制御する、
請求項1又は5に記載の作業機械。
【請求項7】
前記制御部は、前記第3の操作を受け付けている間に、前記旋回操作を受け付けた際に、前記上部旋回体の旋回を開始してから、前記目標角度で旋回を停止させるまでの間、前記上部旋回体の加速と減速とを制御する、
請求項6に記載の作業機械。
【請求項8】
前記目標角度は複数設定される、
請求項1に記載の作業機械。
【請求項9】
前記制御部は、
第1の作業が行われたと判定された時点における旋回角度を、第1の目標角度として設定し、
第2の作業が行われたと判定された時点における旋回角度を、第2の目標角度として設定するように構成されている、
請求項8に記載の作業機械。
【請求項10】
前記制御部は、前記下部走行体で走行した後、前記旋回操作を受け付けた際に、前記上部旋回体の旋回角度が、走行前に設定された前記目標角度に略一致した時に旋回を停止させるように構成されている、
請求項1に記載の作業機械。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業機械、及び作業機械の操作制御システムに関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
従来から、作業機械の動作を制御する技術が提案されている。例えば、作業機械の上部旋回体の旋回を、目標施工面に正対する位置で停止させるようにアクチュエータを動作させる技術が提案されている(例えば特許文献1)。
【先行技術文献】
【特許文献】
【0003】
国際公開第2019/112059号
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来の技術に示されているような、目標施工面に正対する位置以外で上部旋回体を停止させたいという要望がある。この場合、操作者が、停止する位置等を設定する必要があるため、作業負担が大きかった。
【0005】
本発明の一態様は、上部旋回体の旋回を停止させるための制御を容易にすることで、操作性の向上を実現する。
【課題を解決するための手段】
【0006】
本発明の一態様に係る作業機械は、下部走行体と、前記下部走行体に旋回自在の搭載される上部旋回体と、所定の作業が行われたと判定された時点における前記上部旋回体の旋回角度を、目標角度として設定し、旋回操作を受け付けた際、前記上部旋回体の旋回角度が当該目標角度に略一致した時に旋回を停止させるように構成されている制御部と、を備える。
【発明の効果】
【0007】
本発明の一態様によれば、上部旋回体の旋回を停止させるための制御を容易にすることで、操作性の向上を実現する。
【図面の簡単な説明】
【0008】
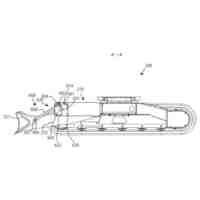
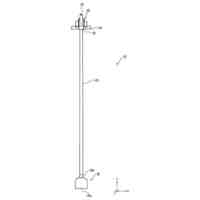
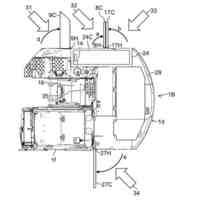
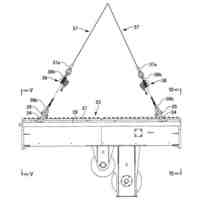
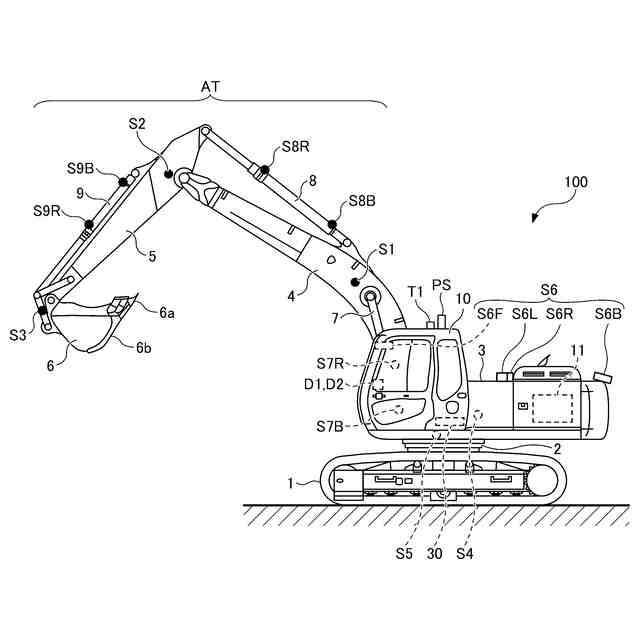
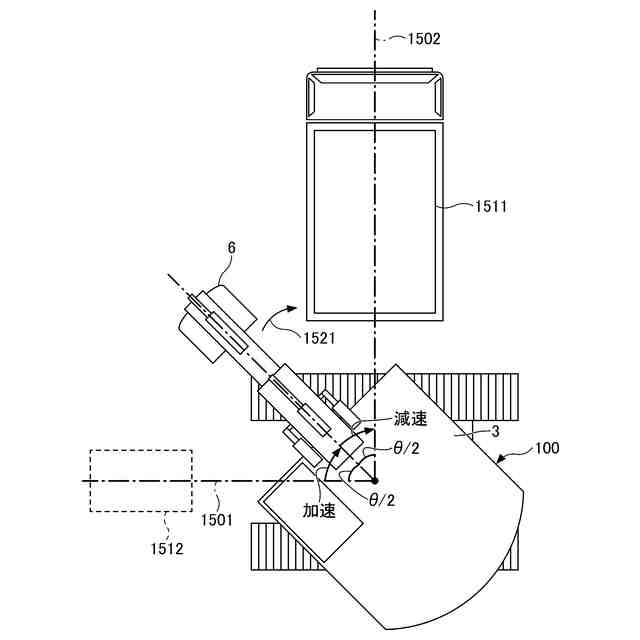
第1の実施形態に係るショベルの側面図である。
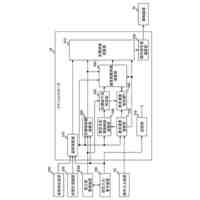
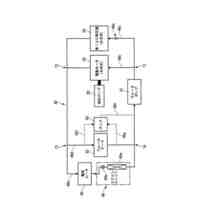
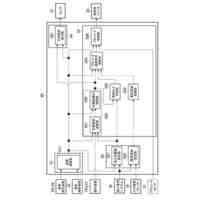
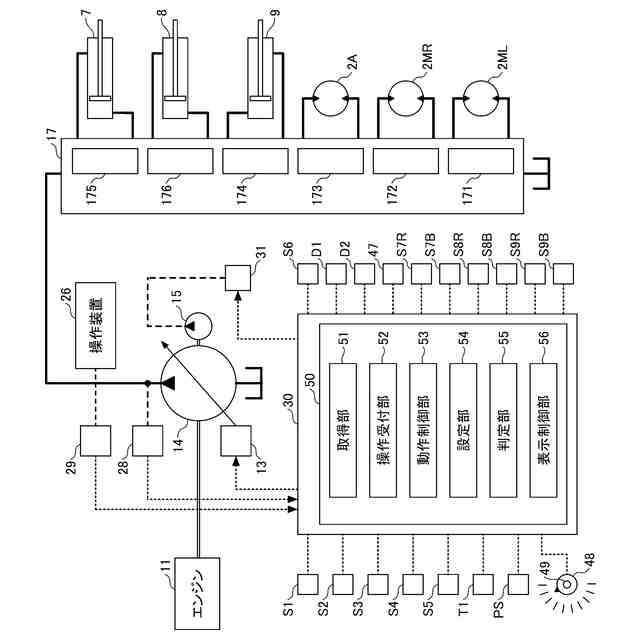
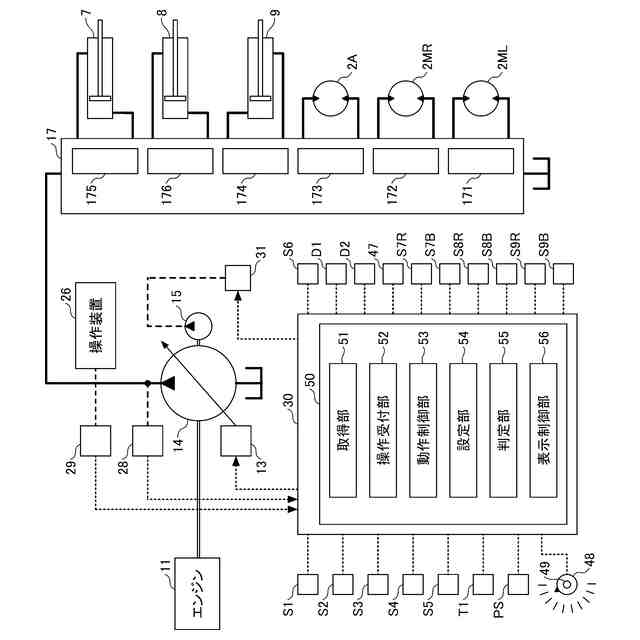
第1の実施形態に係るショベルの構成の一例を示すブロック図である。
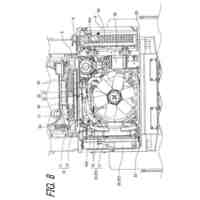
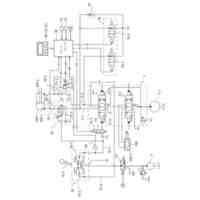
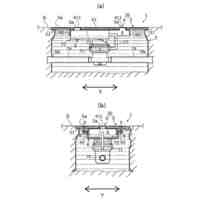
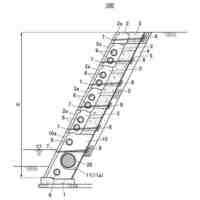
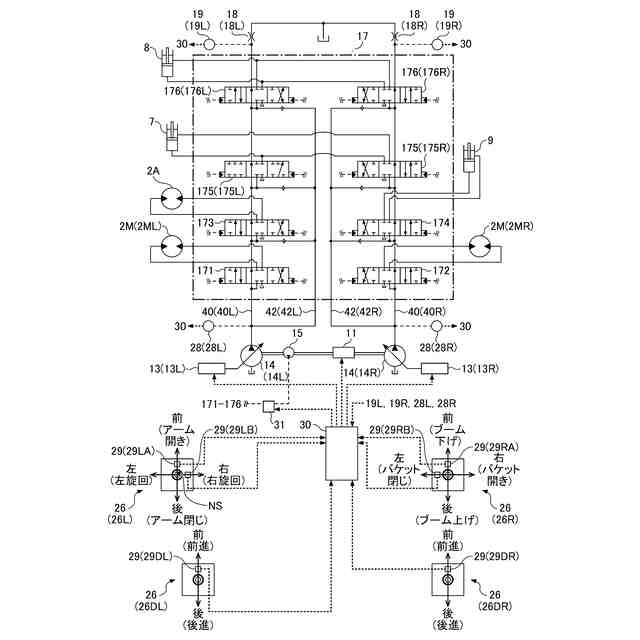
第1の実施形態に係るショベルに搭載される油圧システムの構成例を示す図である。
第1の実施形態に係る旋回油圧モータの操作に関する油圧システム部分を抜き出した図である。
第1の実施形態に係るコントローラにおける上部旋回体の旋回制御を例示した図である。
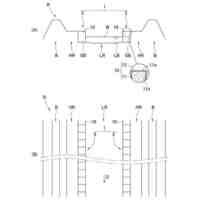
第1の実施形態に係る表示装置が表示する表示画面の一例を示す図である。
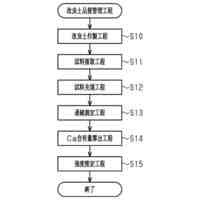
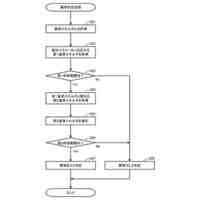
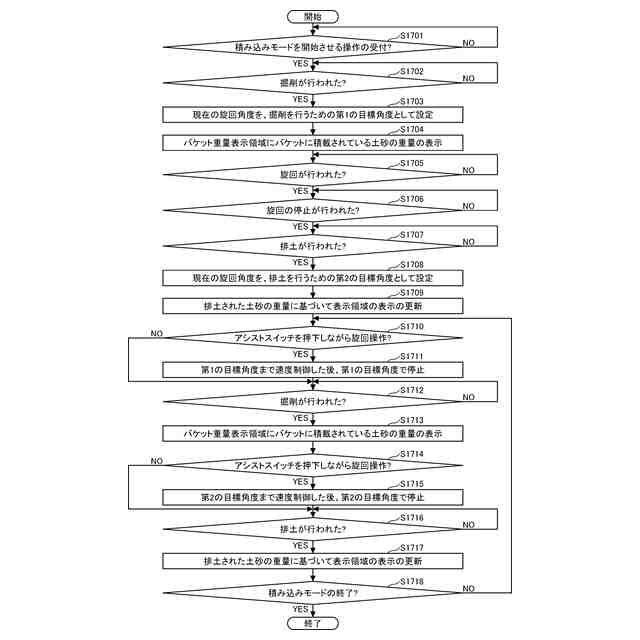
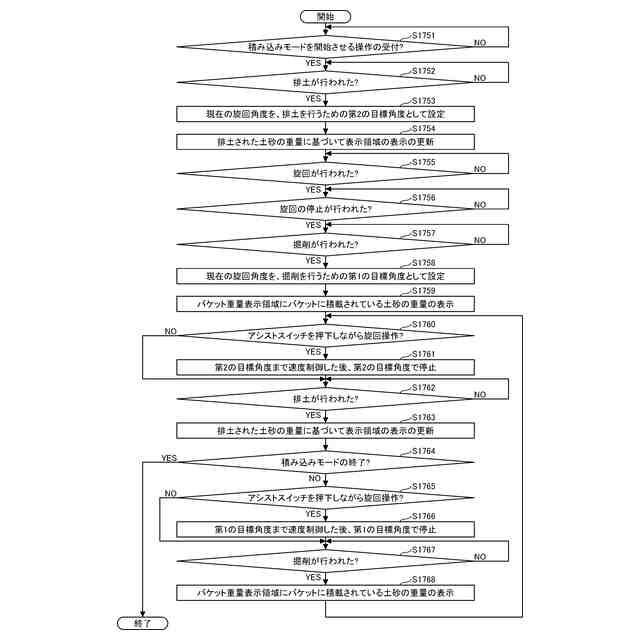
第1の実施形態に係るコントローラが積み込みモードを開始した後に土砂をダンプトラックに積載する処理手順を示したフローチャートである。
第1の実施形態に係るコントローラが積み込みモードを開始した後に土砂をダンプトラックに積載する処理手順を示したフローチャートである。
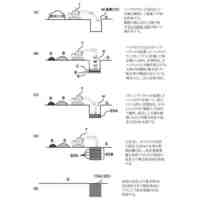
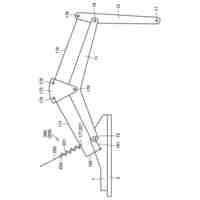
第1の実施形態に係るコントローラによって溝掘りモードが開始された後のショベルの作業を示した概念図である。
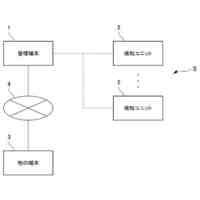
第2の実施形態に係るショベルの遠隔支援システムの構成例を示す概略図である。
【発明を実施するための形態】
【0009】
以下、本発明の実施形態について図面を参照して説明する。また、以下で説明する実施形態は、発明を限定するものではなく例示であって、実施形態に記述される全ての特徴やその組み合わせは、必ずしも発明の本質的なものであるとは限らない。なお、各図面において同一の又は対応する構成には同一の又は対応する符号を付し、説明を省略することがある。
【0010】
以下、本発明の実施形態では、作業機械の一例としてショベルを用いる例について説明するが、ショベルに制限するものではない。建設機械、標準機、応用機、林業機械、又は油圧ショベルをベースとした搬送機械に適用してもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
住友建機株式会社
作業機械及び遠隔支援システム
1か月前
個人
大都市防災設備
12日前
個人
簡易免震構造
1か月前
日立建機株式会社
作業機械
18日前
大成建設株式会社
新設構造物
17日前
個人
水底地盤の天地返し工法と専用作業船
14日前
ヤンマーホールディングス株式会社
作業機械
17日前
日立建機株式会社
作業機械
1か月前
株式会社本久
改良地盤構築方法
25日前
株式会社クボタ
作業車両
1か月前
株式会社クボタ
作業機
24日前
日本車輌製造株式会社
建設機械
1か月前
株式会社大林組
基礎構造
14日前
株式会社久保製作所
河川構造物
1か月前
日立建機株式会社
建設機械
19日前
ヤンマーホールディングス株式会社
作業機械
7日前
株式会社地盤改良堀田
基礎杭の設置方法
11日前
有限会社冨永総業
キャンプ用ペグ抜きハンマー
10日前
住友金属鉱山株式会社
タンク設置用基礎
7日前
株式会社フジタ
建築物とその施工方法
24日前
株式会社大林組
改良土の品質管理方法
19日前
株式会社山幸総建
シートパイルの土砂除去具
12日前
前田工繊株式会社
繊維製布団篭
28日前
日立建機株式会社
電動式建設機械
1か月前
株式会社日立建機ティエラ
建設機械
11日前
ナブテスコ株式会社
建設機械の関節機構
1か月前
日本精機株式会社
施工管理システム及び施工管理方法
28日前
アロン化成株式会社
排水管通気設備
12日前
個人
日本列島都市防災設備又は日本列島大都市防災設備
6日前
日本車輌製造株式会社
建設機械の組立方法
7日前
アクアインテック株式会社
メーターボックスの蓋
17日前
株式会社小松製作所
作業機械
1か月前
株式会社丸和
連結金具セット、及び連結方法
1か月前
日立建機株式会社
作業機械
6日前
株式会社竹中工務店
基礎梁
1か月前
西松建設株式会社
護岸ブロック及び護岸構造物
25日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ