TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025085119
公報種別
公開特許公報(A)
公開日
2025-06-05
出願番号
2023198774
出願日
2023-11-24
発明の名称
ライン引きシステム
出願人
三菱電機エンジニアリング株式会社
代理人
弁理士法人ぱるも特許事務所
主分類
G05D
1/244 20240101AFI20250529BHJP(制御;調整)
要約
【課題】ライン引き装置に依存せず、ラインを引くことができるライン引きシステムを提供する。
【解決手段】ライン引き装置3と、撮影装置2と、撮影装置2が撮影するリアルタイムの撮影データ111上に、ラインデータ112を重ねてイメージデータ113を作成する処理端末1とを備え、ライン引き装置3は、処理端末1からの指示を実行する制御部32と、自身の位置および処理領域101における姿勢を特定するための基準マーク300とを有し、処理端末1は、開始位置にライン引き装置3の基準マーク300が到達するようにライン引き装置3に移動および姿勢を指示し、イメージデータ113およびライン引き装置3の基準マーク300に基づいてライン引き装置3の位置を確認しながら、ライン引き装置3の移動およびライン引き装置3からラインを引くための材料の排出および排出の停止を指示する。
【選択図】図1
特許請求の範囲
【請求項1】
ライン引き装置と、
ラインを引くための処理領域および前記処理領域内の前記ライン引き装置を撮影する撮影装置と、
前記撮影装置が撮影するリアルタイムの撮影データ上に、前記ラインを引くためのラインデータを重ねてイメージデータを作成する処理端末とを備えたライン引きシステムであって、
前記ライン引き装置は、前記処理端末からの指示を実行する制御部と、自身の位置および前記処理領域における姿勢を特定するための基準マークとを有し、
前記処理端末は、
前記イメージデータの前記ラインを引く開始位置に前記ライン引き装置の前記基準マークが到達するように前記ライン引き装置に移動を指示するとともに、前記開始位置にて前記ライン引き装置の姿勢を指示し、
前記イメージデータおよび前記ライン引き装置の前記基準マークに基づいて前記ライン引き装置の位置を確認しながら、前記ライン引き装置の移動および前記ライン引き装置から前記ラインを引くための材料の排出および排出の停止を指示するライン引きシステム。
続きを表示(約 690 文字)
【請求項2】
前記処理端末は、前記イメージデータと前記ライン引き装置の前記基準マークとから前記ライン引き装置の姿勢を確認し、前記ライン引き装置の姿勢があらかじめ設定された姿勢閾値から外れていると判定すると、前記ライン引き装置に当該姿勢の修正を指示する請求項1に記載のライン引きシステム。
【請求項3】
前記ライン引き装置は、引いた後の前記ラインの不良を検知する検知部を備え、
前記制御部は、前記検知部が引いた後の前記ラインのライン不良を検知すると前記ライン引き装置を停止するとともに前記処理端末に前記ライン不良を送信し、
前記処理端末は、前記ライン引き装置を前記ライン不良が発生した位置に戻して、再度前記ラインを引く指示を行う請求項1または請求項2に記載のライン引きシステム。
【請求項4】
前記ライン引き装置は、前記材料を貯留する貯留部を備え、
前記制御部は、前記貯留部の前記材料の貯留量があらかじめ設定された量よりも低下すると貯留量低下であると判定し、前記ライン引き装置を停止するとともに前記処理端末に前記貯留量低下が発生したことを送信する請求項1または請求項2に記載のライン引きシステム。
【請求項5】
前記ライン引き装置は、自身を駆動するための充電部を備え、
前記制御部は、前記充電部の充電量があらかじめ設定された量よりも低下すると充電量低下であると判定し、前記ライン引き装置を停止するとともに前記処理端末に前記充電量低下したことを送信する請求項1または請求項2に記載のライン引きシステム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、ライン引きシステムに関するものである。
続きを表示(約 2,600 文字)
【背景技術】
【0002】
従来のライン引き装置は、ラインカー内に動力源として、バッテリーおよび駆動モーターを取り付け、ラインカー内に設定されたライン情報をラインカー内にて記憶し、現在の位置を開始位置と設定することで、その場所から記憶しているライン情報を元に自律的にラインを引く機能を搭載する自律走行型のラインカーである。
【先行技術文献】
【特許文献】
【0003】
特開2008-243166号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来のライン引き装置は、ライン引き装置の開始位置と方向が正確でないと、想定したラインを引くことができず、ライン引きをライン引き装置に依存してるという問題点があった。
【0005】
本開示は、上記のような課題を解決するための技術を開示するものであり、ライン引き装置に依存せず、ラインを引くことができるライン引きシステムを提供することを目的とする。
【課題を解決するための手段】
【0006】
本開示のライン引きシステムは、
ライン引き装置と、
ラインを引くための処理領域および前記処理領域内の前記ライン引き装置を撮影する撮影装置と、
前記撮影装置が撮影するリアルタイムの撮影データ上に、前記ラインを引くためのラインデータを重ねてイメージデータを作成する処理端末とを備えたライン引きシステムであって、
前記ライン引き装置は、前記処理端末からの指示を実行する制御部と、自身の位置および前記処理領域における姿勢を特定するための基準マークとを有し、
前記処理端末は、
前記イメージデータの前記ラインを引く開始位置に前記ライン引き装置の前記基準マークが到達するように前記ライン引き装置に移動を指示するとともに、前記開始位置にて前記ライン引き装置の姿勢を指示し、
前記イメージデータおよび前記ライン引き装置の前記基準マークに基づいて前記ライン引き装置の位置を確認しながら、前記ライン引き装置の移動および前記ライン引き装置から前記ラインを引くための材料の排出および排出の停止を指示するものである。
【発明の効果】
【0007】
本開示のライン引きシステムによれば、ライン引き装置に依存せずラインを引くことができる。
【図面の簡単な説明】
【0008】
図1Aは、実施の形態1によるライン引きシステムの構成を示す図である。図1Bは、図1Aに示したライン引きシステムの処理領域を示す図である。
図1に示したライン引きシステムのライン引き装置の構成を示す斜視図である。
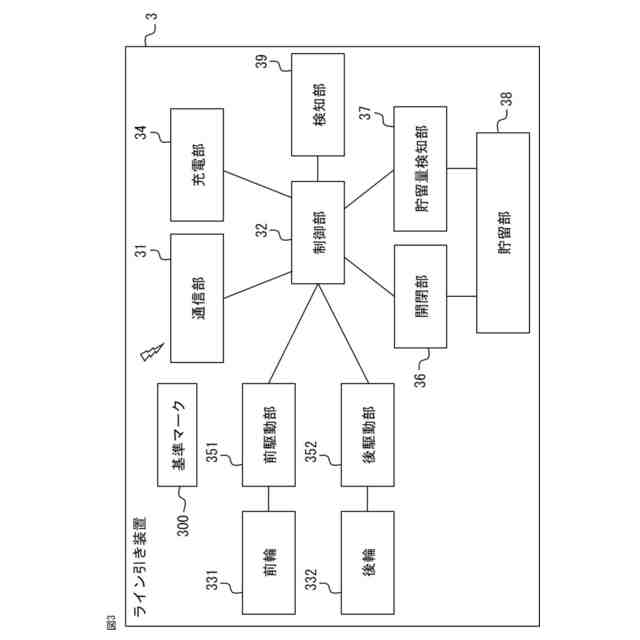
図2に示したライン引き装置の構成を示すブロック図である。
図2に示したライン引き装置の貯留部の構成を示す図である。
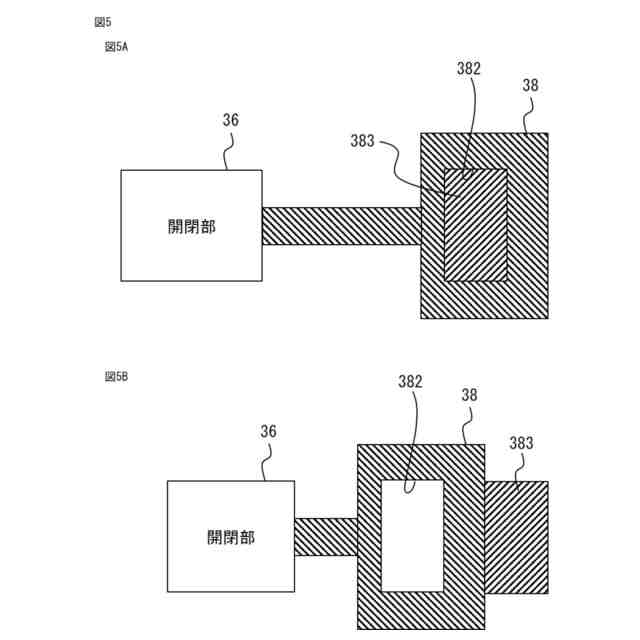
図5Aは、図4に示したライン引き装置の開閉部による閉状態の動作を説明するための平面図である。図5Bは、図4に示したライン引き装置の開閉部による開状態の動作を説明するための平面図である。
図2に示したライン引き装置の駆動部分の構成を示す平面図である。
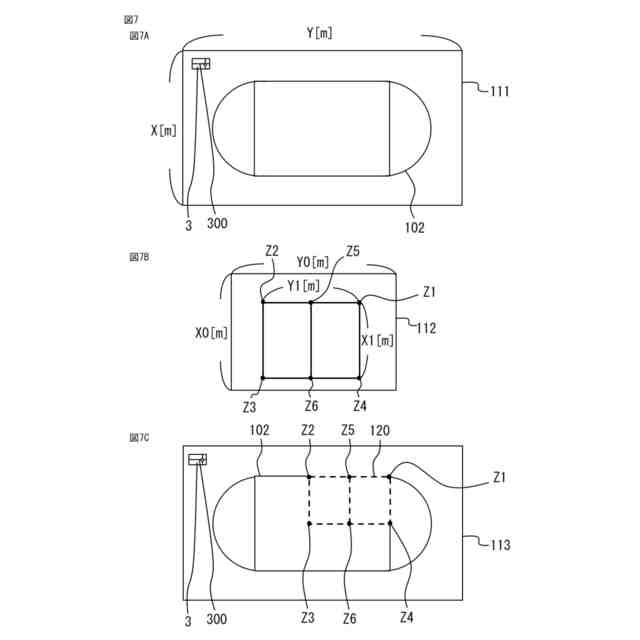
図7Aは、図1Bに示したライン引きシステムの撮影データを示す図である。図7Bは、図1に示したライン引きシステムで使用するラインデータを示す図である。図7Cは、図7Aに示した撮影データと、図7Bに示したラインデータとから作成されるイメージデータを示す図である。
図8Aは、図1に示したライン引きシステムのライン引き方法を説明する平面図である。図8Bは、図1に示したライン引きシステムのライン引き方法を説明する平面図である。
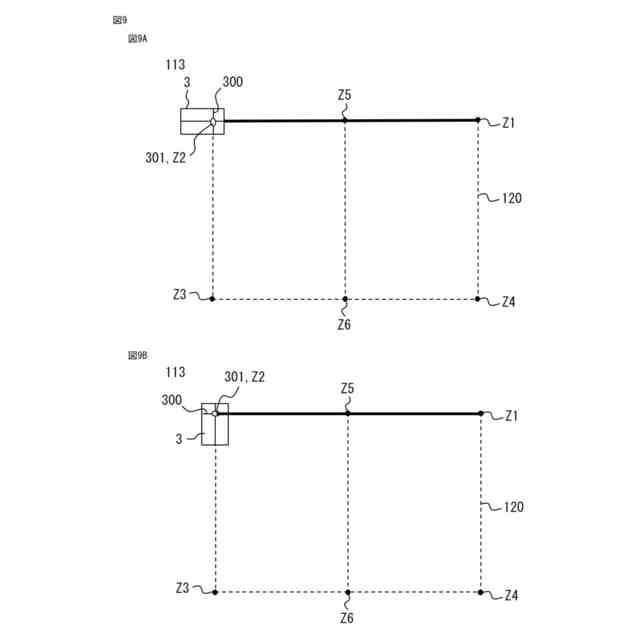
図9Aは、図1に示したライン引きシステムのライン引き方法を説明する平面図である。図9Bは、図1に示したライン引きシステムのライン引き方法を説明する平面図である。
図1に示したライン引きシステムのライン引き方法を説明する平面図である。
図11Aは、図1に示したライン引きシステムのライン引き方法を説明する平面図である。図11Bは、図1に示したライン引きシステムのライン引き方法を説明する平面図である。
図1に示したライン引きシステムのライン引き方法を示すフローチャートである。
図1に示したライン引きシステムのライン引き方法を示すフローチャートである。
図1に示したライン引きシステムのライン引き方法を示すフローチャートである。
実施の形態1による他のライン引きシステムの構成を示す図である。
図16Aは、図15に示したライン引きシステムの撮影データを示す図である。図16Bは、図15に示したライン引きシステムで使用するラインデータを示す図である。図16Cは、図16Aに示した撮影データと、図16Bに示したラインデータとから作成されるイメージデータを示す図である。
図1および図2に示した処理端末および制御部のハードウエアを示すブロック図である。
【発明を実施するための形態】
【0009】
実施の形態1.
図1Aは、実施の形態1によるライン引きシステムの構成を示す図である。図1Bは、図1Aに示したライン引きシステムの処理領域を示す図である。図2は、図1に示したライン引きシステムのライン引き装置の構成を示す斜視図であり、一部を透視した図である。図3は、図2に示したライン引き装置の構成を示すブロック図である。図4は、図2に示したライン引き装置の貯留部の構成を示す図である。図5Aは、図4に示したライン引き装置の開閉部による閉状態の動作を説明するための平面図である。図5Bは、図4に示したライン引き装置の開閉部による開状態の動作を説明するための平面図である。
【0010】
図6は、図2に示したライン引き装置の駆動部分の構成を示す平面図である。図7Aは、図1Bに示したライン引きシステムの撮影データを示す図である。図7Bは、図1に示したライン引きシステムで使用するラインデータを示す図である。図7Cは、図7Aに示した撮影データと、図7Bに示したラインデータとから作成されるイメージデータを示す図である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
エイブリック株式会社
基準電圧回路
1か月前
株式会社クボタ
作業車
2か月前
ローム株式会社
半導体集積回路
2か月前
株式会社ダイフク
搬送車
2か月前
トヨタ自動車株式会社
ペダル機構
16日前
三栄ハイテックス株式会社
基準電圧回路
2日前
エイブリック株式会社
ボルテージレギュレータ
1か月前
株式会社ダイフク
搬送設備
17日前
三菱電機株式会社
自己位置推定装置
26日前
トヨタ自動車株式会社
工作機械の制御装置
2か月前
トヨタ自動車株式会社
工作機械の制御装置
2か月前
株式会社ダイフク
物品搬送設備
2か月前
株式会社やまびこ
走行制御装置
1か月前
トヨタ自動車株式会社
移動体、及び制御方法
24日前
株式会社タブチ
減圧弁
1か月前
WHILL株式会社
電動モビリティ
25日前
株式会社計数技研
移動体、及びプログラム
17日前
日本信号株式会社
自走式装置
1か月前
株式会社ダイヘン
搬送車
1か月前
株式会社ダイヘン
搬送車
1か月前
ローム株式会社
半導体装置
5日前
株式会社ダイヘン
搬送車
1か月前
株式会社ダイヘン
搬送車
1か月前
株式会社ダイヘン
搬送車
24日前
株式会社ダイヘン
移動体、及び誘導線検出装置
9日前
井関農機株式会社
作業車両
1か月前
株式会社デンソー
診断装置
1か月前
株式会社ダイヘン
移動体、及び誘導線検出装置
9日前
株式会社アイシン
自律移動体
1か月前
株式会社アイシン
自律移動体
1か月前
オルガノ株式会社
運転管理方法及び運転管理装置
2か月前
株式会社アイシン
自律移動体
1か月前
ミツミ電機株式会社
多方向入力装置
2か月前
ミツミ電機株式会社
多方向入力装置
2か月前
ミツミ電機株式会社
多方向入力装置
2か月前
ミツミ電機株式会社
多方向入力装置
2か月前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ


































