TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025084401
公報種別
公開特許公報(A)
公開日
2025-06-03
出願番号
2023198279
出願日
2023-11-22
発明の名称
飛行装置
出願人
国立研究開発法人宇宙航空研究開発機構
代理人
個人
,
個人
,
個人
,
個人
主分類
B64B
1/00 20060101AFI20250527BHJP(航空機;飛行;宇宙工学)
要約
【課題】安定したホバリングが可能であり、かつ、飛行中の操縦者が腕を自由に用いることができる飛行装置を提供することを目的とする。
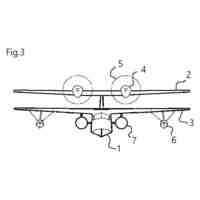
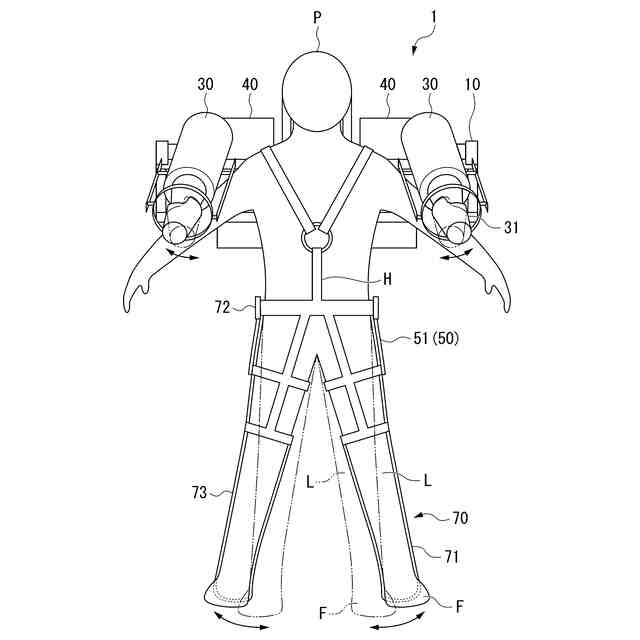
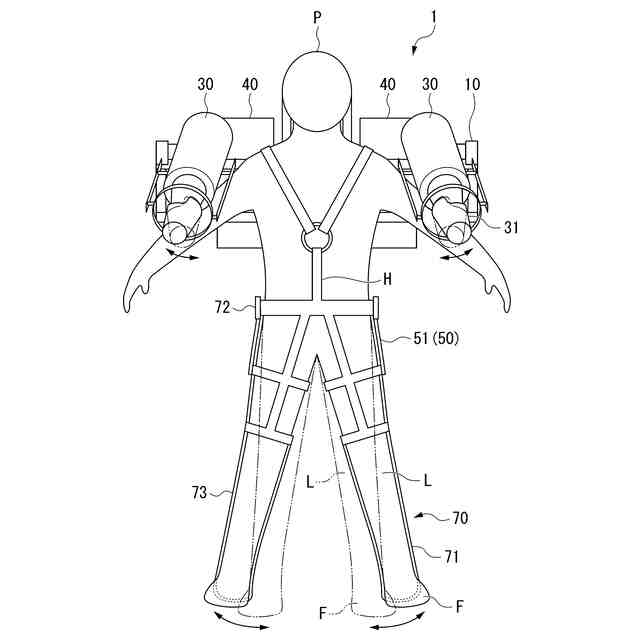
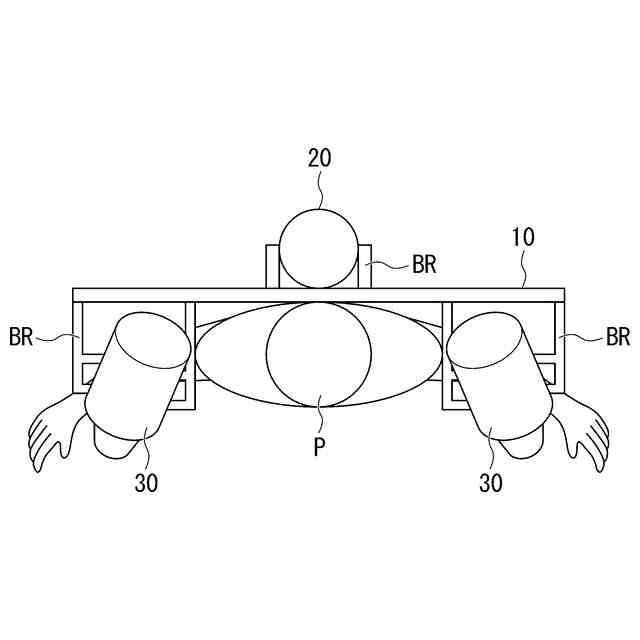
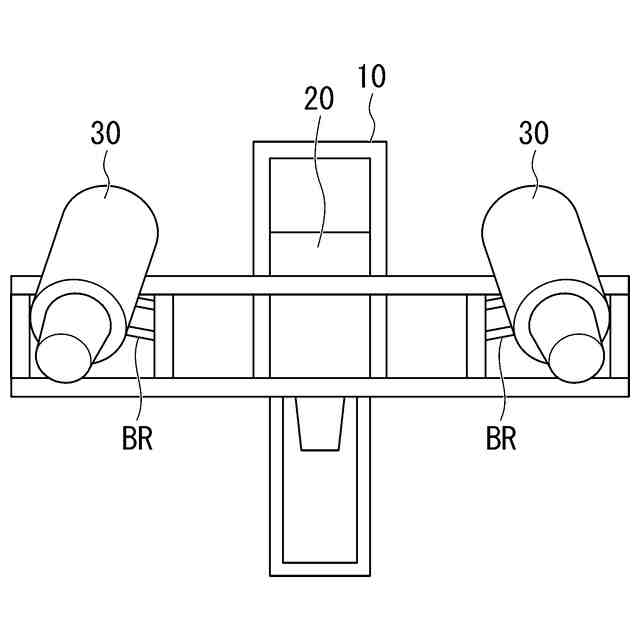
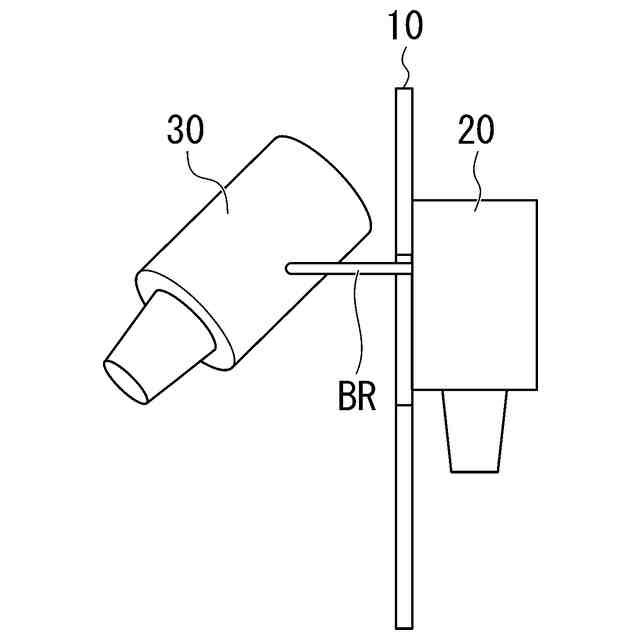
【解決手段】操縦者Pが装着する飛行装置1であって、操縦者Pの胴体に装着される骨格部10と、骨格部10に取り付けられ、骨格部10に対して出力の向きが変更不可である第1推力装置20と、骨格部10に取り付けられ、骨格部10に対して出力の向きが変更可能である第2推力装置30と、を備えることを特徴とする。
【選択図】図1
特許請求の範囲
【請求項1】
操縦者が装着する飛行装置であって、
前記操縦者の胴体に装着される骨格部と、
前記骨格部に取り付けられ、前記骨格部に対して出力の向きが変更不可である第1推力装置と、
前記骨格部に取り付けられ、前記骨格部に対して出力の向きが変更可能である第2推力装置と、
を備える、
ことを特徴とする飛行装置。
続きを表示(約 810 文字)
【請求項2】
前記第1推力装置の出力の向きと、前記第2推力装置の出力の向きとは、一致しない、
ことを特徴とする請求項1に記載の飛行装置。
【請求項3】
前記第1推力装置及び前記第2推力装置は、前記操縦者の肩又は背中に配置される、
ことを特徴とする請求項1に記載の飛行装置。
【請求項4】
前記第1推力装置は前記操縦者の背中に配置され、
前記第2推力装置は前記操縦者の肩の上に配置される、
ことを特徴とする請求項3に記載の飛行装置。
【請求項5】
前記飛行装置は複数の第2推力装置を備え、
前記複数の第2推力装置は前記操縦者の両肩に配置され、
前記複数の第2推力装置の出力の向きは互いに異なる、
ことを特徴とする請求項4に記載の飛行装置。
【請求項6】
前記第2推力装置は、前記第2推力装置の出力の向きを変更可能な偏向ノズルを有する、
ことを特徴とする請求項1に記載の飛行装置。
【請求項7】
前記第1推力装置の出力の大きさ、及び、前記第2推力装置の出力の大きさ及び向きを操作する操作部を更に備える、
ことを特徴とする請求項1に記載の飛行装置。
【請求項8】
前記操作部は、前記操縦者の身体の一部に設けられる、
ことを特徴とする請求項7に記載の飛行装置。
【請求項9】
前記操作部は、前記第1推力装置の出力の大きさ、及び、前記第2推力装置の出力の大きさを、段階的に設定可能である、
ことを特徴とする請求項7に記載の飛行装置。
【請求項10】
前記操作部は、前記第2推力装置の出力の向きを、無段階的に設定可能である、
ことを特徴とする請求項7に記載の飛行装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、飛行装置に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
人間が推進系を装着して飛行する飛行装置が開発されている(例えば、特許文献1、2及び非特許文献1)。当該飛行装置は、例えば、救助活動への貢献を目的として、救助隊員の移動を助ける目的に用いられる。
【先行技術文献】
【特許文献】
【0003】
米国特許第11279482号明細書
米国特許第10112713号明細書
【非特許文献】
【0004】
The first Jetman Yves Rossy, [online]. [Retrieved on 27 September, 2023], Retrieved from the internet : <URL: https://yvesrossy.com/>
【発明の概要】
【発明が解決しようとする課題】
【0005】
上述の各飛行装置は、飛行中のホバリングについて次の課題がある。
例えば、特許文献2及び非特許文献1に係る飛行装置は、推力装置の出力の大きさを調整することでホバリングする。このため、ホバリングの安定性が、操縦者の操作に対する推力装置の反応速度に依存する。特許文献2及び非特許文献1においては、比較的反応速度の低いジェットエンジンを用いていることから、ホバリングの安定性が低い。よって、ホバリングによって高度を安定させることが困難である。
また、特許文献1に係る飛行装置は、操縦者の腕に推力装置が取り付けられている。そして、操縦者が腕を動かすことで推力装置の向きを調整しホバリングする。このため、飛行中において、操縦者の腕を飛行操作以外に用いることができず、飛行中においては腕や上半身を使ったあらゆる作業が不可能である。
【0006】
本発明は、前述した事情に鑑みてなされたものであって、安定したホバリングが可能であり、かつ、飛行中の操縦者が腕を自由に用いることができる飛行装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
<1>本発明の態様1に係る飛行装置は、操縦者が装着する飛行装置であって、前記操縦者の胴体に装着される骨格部と、前記骨格部に取り付けられ、前記骨格部に対して出力の向きが変更不可である第1推力装置と、前記骨格部に取り付けられ、前記骨格部に対して出力の向きが変更可能である第2推力装置と、を備えることを特徴とする。
【0008】
態様1に係る発明によれば、第1推力装置は骨格部に対して変更不可であり、第2推力装置は骨格部に対して変更可能である。これにより、第2推力装置の出力の方向を変更することで、第1推力装置と第2推力装置とにおいて、互いに出力の向きを異ならせることができる。これにより、例えば、第2推力装置の出力の向きを調整することで、飛行姿勢を安定させることができる。あるいは、飛行する方向を操作することができる。また、例えば、第1推力装置の出力の大きさと、第2推力装置の出力の大きさ及び向きと、を調整することで、より確実に飛行姿勢を安定させることができる。あるいは、より確実に飛行する方向を操作することができる。よって、例えば、推力装置の出力の大きさのみを調整する場合と比較して、より安定したホバリングを可能とすることができる。
また、第1推力装置及び第2推力装置が、操縦者の胴体に装着される骨格部に取り付けられることで、操縦者が手を用いて第1推力装置又は第2推力装置を把持することを不要とすることができる。操縦者が、飛行中において腕を自由に用いることができる。また、例えば、第2推力装置の出力の向きを、操縦者の腕によらずに調整する場合には、上述のホバリングを、操縦者の身体能力によらずに行うことができる。
【0009】
<2>本発明の態様2に係る飛行装置は、態様1に係る飛行装置において、前記第1推力装置の出力の向きと、前記第2推力装置の出力の向きとは、一致しないことを特徴とする。
【0010】
態様2に係る発明によれば、第1推力装置の出力の向きと、第2推力装置の出力の向きとは、一致しない。これにより、飛行中の操縦者は、複数の方向からの推力を受けることができる。よって、これらの推力を釣り合わせることで、第1推力装置と第2推力装置とによって、より確実に飛行姿勢を安定させることができる。あるいは、より確実に飛行する方向を操作することができる。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
個人
ドローン
2か月前
個人
着火ドローン
2日前
個人
救難消防飛行艇
12日前
個人
ドローンシステム
4か月前
個人
陸海空用の乗り物
1か月前
個人
連続回転可能な飛行機翼
22日前
株式会社三圓
浮上装置
8か月前
個人
垂直離着陸機用エンジン改
4か月前
個人
飛行艇
10か月前
個人
ドローンの計測操作方法2
8か月前
個人
ドローンの計測操作方法3
8か月前
キヤノン電子株式会社
磁気トルカ
9か月前
個人
ドローン消音装置
7か月前
個人
ドローンを自動離着陸する方法
4か月前
個人
空中移動システム
5か月前
個人
エアライナー全自動パラシュート
2か月前
トヨタ自動車株式会社
ドローン
2か月前
株式会社ACSL
システム
3か月前
株式会社ACSL
システム
3か月前
合同会社アドエア
パラシュート射出装置
2か月前
株式会社セネック
ドローンポート
12か月前
合同会社アドエア
飛行体の落下補助装置
5か月前
株式会社小糸製作所
飛行体ポート
23日前
株式会社セネック
ドローンポート
12か月前
個人
垂直離着陸機用ガスタービンエンジン
4か月前
株式会社SUBARU
移動体
5か月前
全日本空輸株式会社
ドーリシステム
7か月前
川崎重工業株式会社
水素航空機
22日前
ミネベアミツミ株式会社
無人機
2か月前
ミネベアミツミ株式会社
無人機
2か月前
HDサービス合同会社
カメラ装着装置
7か月前
管清工業株式会社
地中管内の調査装置
15日前
株式会社 雲田商会
管路調査用ドローン
11日前
本田技研工業株式会社
航空機
7か月前
株式会社SUBARU
構造体の製造方法
9か月前
株式会社SUBARU
構造体の製造方法
9か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ