TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025083433
公報種別
公開特許公報(A)
公開日
2025-05-30
出願番号
2025036870,2022564970
出願日
2025-03-07,2020-11-27
発明の名称
飛行体、プロセッサ、飛行制御方法、プログラム、飛行補助設備
出願人
株式会社エアロネクスト
代理人
主分類
B64U
70/95 20230101AFI20250523BHJP(航空機;飛行;宇宙工学)
要約
【課題】GNSS等を利用して自律飛行する飛行体であって、飛行の信頼性をコストの増加を抑えながら向上し得る飛行体等を提供すること。
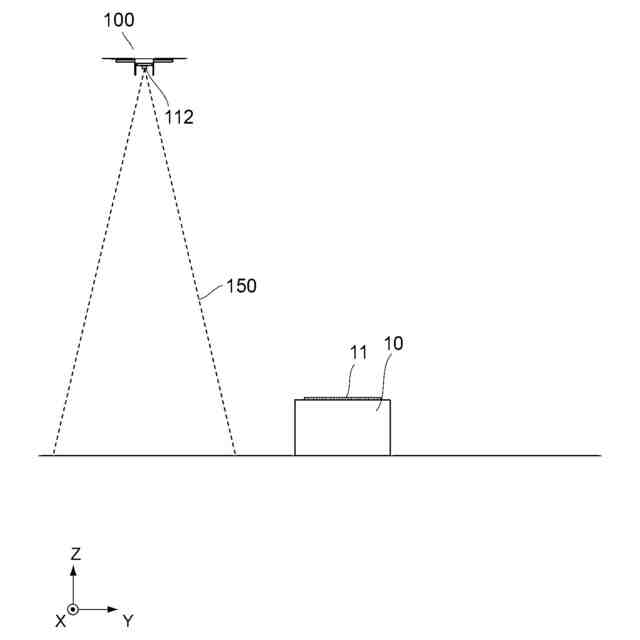
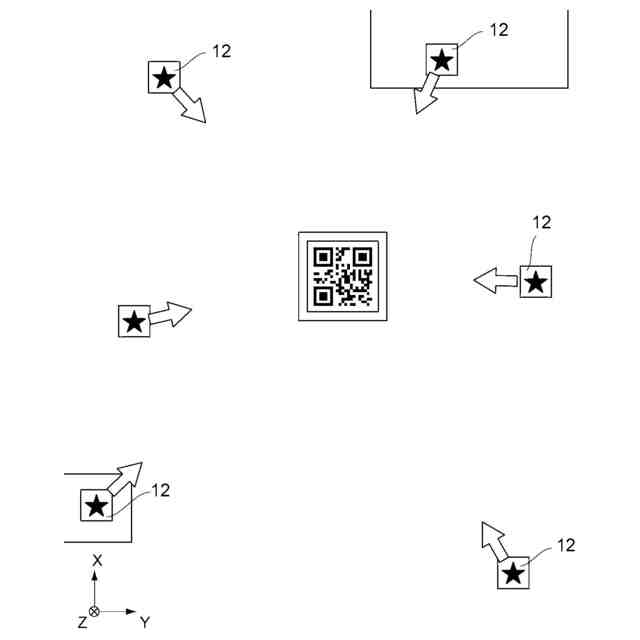
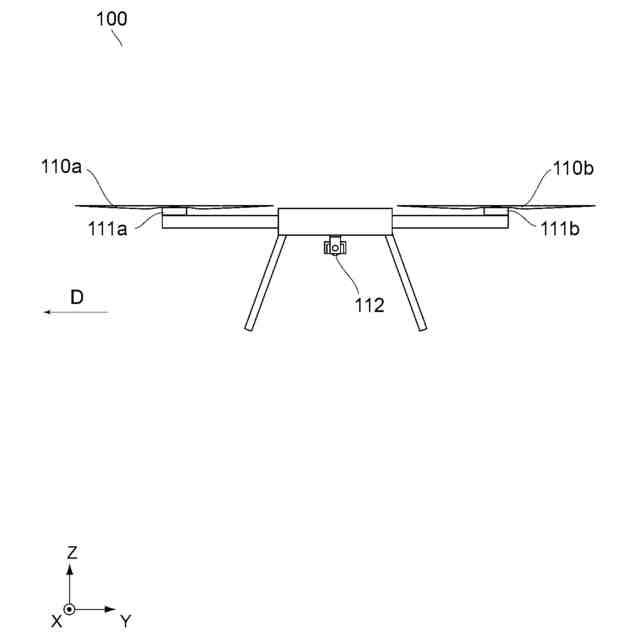
【解決手段】指定航路上を自律飛行する飛行体であって、前記指定航路上での自律飛行を継続していない場合に、外部情報取得装置により外部から取得した着陸地点に関する情報に基づき前記飛行体の飛行制御を行うプロセッサを備える。前記外部情報取得装置は、センサである。前記センサは、画像センサである。前記外部情報取得装置は、ビーコン機器である。前記プロセッサは、前記着陸地点に関する情報を取得するための飛行ルートに基づき飛行制御を行う安全着陸モードを実行する。
【選択図】図2
特許請求の範囲
【請求項1】
指定航路上を自律飛行する飛行体であって、
前記指定航路上での自律飛行を継続していない場合に、外部情報取得装置により外部から取得した着陸地点に関する情報に基づき前記飛行体の飛行制御を行うプロセッサを備える、
ことを特徴とする飛行体。
続きを表示(約 1,100 文字)
【請求項2】
請求項1に記載の飛行体であって、
前記外部情報取得装置は、センサである、
ことを特徴とする飛行体。
【請求項3】
請求項2に記載の飛行体であって、
前記センサは、画像センサである、
ことを特徴とする飛行体。
【請求項4】
請求項1に記載の飛行体であって、
前記外部情報取得装置は、ビーコン機器である、
ことを特徴とする飛行体。
【請求項5】
請求項1ないし4のいずれかに記載の飛行体であって、
前記プロセッサは、前記着陸地点に関する情報を取得するための飛行ルートに基づき飛行制御を行う探索モードを実行する、
ことを特徴とする飛行体。
【請求項6】
請求項1ないし4のいずれかに記載の飛行体であって、
前記プロセッサは、平時においては、前記着陸地点に関する情報を前記指定航路上の着陸地点に関する情報として認識し、
安全着陸モード時においては、前記着陸地点に関する情報を前記指定航路上の着陸地点とは異なる緊急着陸地点に関する情報として認識する、
ことを特徴とする飛行体。
【請求項7】
請求項1ないし6のいずれかに記載の飛行体であって、
前記飛行体は、前記着陸地点に関する情報を他の飛行体または前記飛行体に自律飛行を支持する管理サーバへ送信する、
ことを特徴とする飛行体。
【請求項8】
指定航路上を自律飛行する飛行体に搭載されるプロセッサであって、
前記指定航路上での自律飛行を継続していない場合に、情報取得装置により外部情報取得装置から取得した着陸地点に関する情報に基づき前記飛行体の飛行制御を行う、
ことを特徴とするプロセッサ。
【請求項9】
指定航路上を自律飛行する飛行体の飛行制御方法であって、
前記指定航路上での自律飛行を継続していない場合に、外部情報取得装置により外部から取得した着陸地点に関する情報に基づき前記飛行体の飛行制御を行うステップ、を含む、
ことを特徴とする飛行制御方法。
【請求項10】
指定航路上を自律飛行する飛行体に飛行制御方法を実行させるプログラムであって、
前記飛行制御方法は、
前記指定航路上での自律飛行を継続していない場合に、外部情報取得装置により外部から取得した着陸地点に関する情報に基づき前記飛行体の飛行制御を行うステップ、を含む、
ことを特徴とするプログラム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、飛行体、プロセッサ、飛行制御方法、プログラム、飛行補助設備に関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
近年、ドローン(Drone)や無人航空機(UAV:Unmanned Aerial Vehicle)などの飛行体(以下、「飛行体」と総称する)を用いるサービスの実用化に向けた研究や実証実験が進められている。宅配や検査などのサービス実施においては、飛行や離着陸が自動で行われることが望ましい。このような状況を鑑みて、特許文献1においては、飛行体が自律着陸可能な着陸施設が開示されている。。
【0003】
より具体的には、特許文献1では、飛行体の自律着陸を補助可能なマーカーを備える着陸施設が開示されている。
【先行技術文献】
【特許文献】
【0004】
米国特許出願公開第20160122038号
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1においては、低コストかつ効率的に飛行体の自律着陸を実現可能な着陸設備を提供すること可能となっている。
【0006】
しかし、GNSS等(衛星測位システム)による自律飛行は、常に同じ精度で行えるという保証がない。飛行体と衛星の位置関係や環境によっては衛星の補足数が少なく、正確な自己位置推定が困難であったり、太陽フレアなどの太陽活動により誤差が発生したりする場合がある。このような状況下では、特許文献1の着陸設備を使用した自律着陸において、GNSS等による自律飛行を行う飛行体が、マーカーを認識できる距離まで正確に移動できず、満足に自律着陸を行えない恐れがある。
【0007】
GNSS等による自律飛行が困難な場合の解決方法として、地上からの管制システムによる誘導や、飛行体が備えるライダー等によるリアルタイムマッピングシステムが周知されているが、これらは地上施設の整備や、メンテナンス等による運用コストの増加、飛行体の重量増加につながるため、サービスの実装と継続において最適とは言えない。
【0008】
そこで、本発明は、GNSS等を利用して自律飛行する飛行体であって、飛行の信頼性をコストの増加を抑えながら向上し得る飛行体等を提供することを一つの目的とする。
【課題を解決するための手段】
【0009】
本発明によれば、指定航路上を自律飛行する飛行体であって、前記指定航路上での自律飛行を継続していない場合に、外部情報取得装置により外部から取得した着陸地点に関する情報に基づき前記飛行体の飛行制御を行うプロセッサを備える飛行体を提供することができる。
【発明の効果】
【0010】
本発明によれば、GNSS等を利用して自律飛行する飛行体であって、飛行の信頼性をコストの増加を抑えながら向上し得る飛行体等を提供し得る。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
ドローン
2か月前
個人
着火ドローン
今日
個人
救難消防飛行艇
10日前
個人
ドローンシステム
4か月前
株式会社三圓
浮上装置
8か月前
個人
陸海空用の乗り物
1か月前
個人
連続回転可能な飛行機翼
20日前
個人
ドローンの計測操作方法2
8か月前
個人
ドローンの計測操作方法3
8か月前
個人
飛行艇
10か月前
個人
垂直離着陸機用エンジン改
3か月前
キヤノン電子株式会社
磁気トルカ
9か月前
個人
ドローン消音装置
6か月前
個人
ドローンを自動離着陸する方法
4か月前
個人
空中移動システム
5か月前
トヨタ自動車株式会社
ドローン
2か月前
個人
エアライナー全自動パラシュート
2か月前
株式会社小糸製作所
飛行体ポート
21日前
株式会社セネック
ドローンポート
12か月前
合同会社アドエア
パラシュート射出装置
2か月前
株式会社セネック
ドローンポート
12か月前
合同会社アドエア
飛行体の落下補助装置
5か月前
株式会社ACSL
システム
3か月前
株式会社ACSL
システム
3か月前
個人
垂直離着陸機用ガスタービンエンジン
4か月前
株式会社SUBARU
移動体
5か月前
全日本空輸株式会社
ドーリシステム
7か月前
管清工業株式会社
地中管内の調査装置
13日前
ミネベアミツミ株式会社
無人機
2か月前
川崎重工業株式会社
水素航空機
20日前
HDサービス合同会社
カメラ装着装置
7か月前
ミネベアミツミ株式会社
無人機
2か月前
株式会社SUBARU
構造体の製造方法
9か月前
株式会社SUBARU
構造体の製造方法
9か月前
株式会社小糸製作所
航空機用灯具
9か月前
本田技研工業株式会社
航空機
7か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ