TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025082993
公報種別
公開特許公報(A)
公開日
2025-05-30
出願番号
2023196601
出願日
2023-11-20
発明の名称
無人搬送車
出願人
三菱ロジスネクスト株式会社
代理人
弁理士法人みのり特許事務所
主分類
G05D
1/24 20240101AFI20250523BHJP(制御;調整)
要約
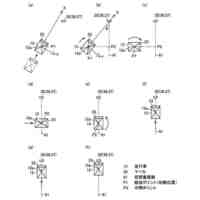
【課題】通常走行モードと横行モードとを切り替える際に車体の姿勢変化を抑制できる無人搬送車を提供する。
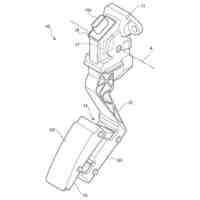
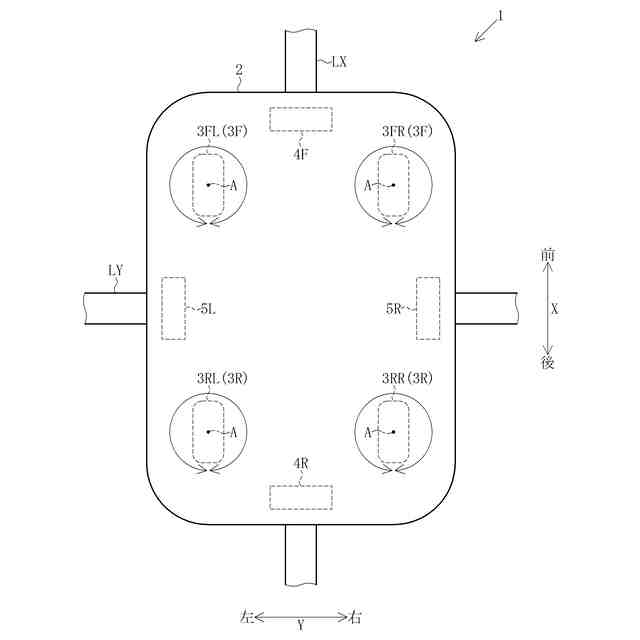
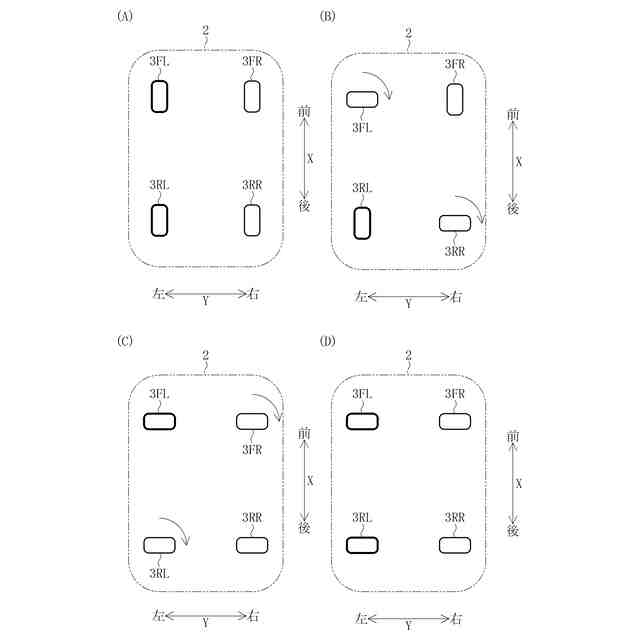
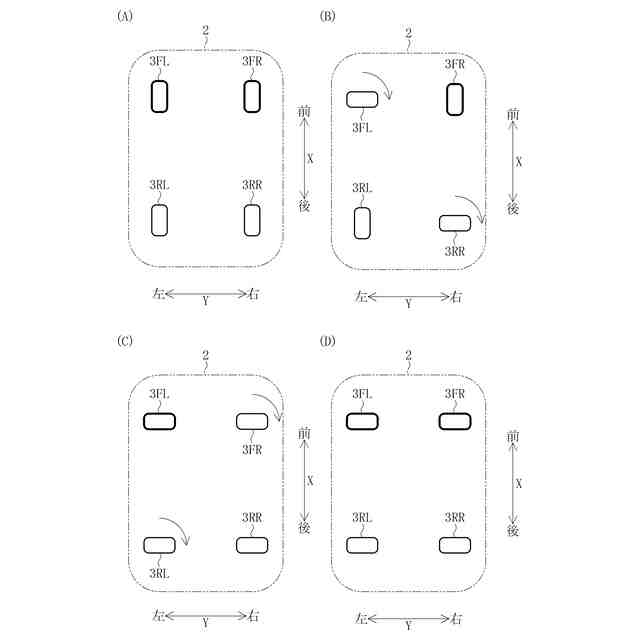
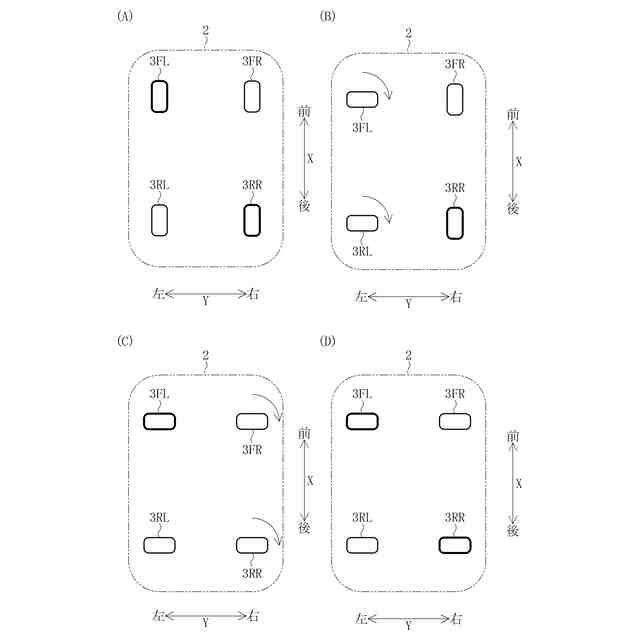
【解決手段】前後方向Xに直進走行可能な通常走行モードと左右方向Yに直進走行可能な横行モードとを切り替え可能な無人搬送車は、複数の車輪(左前輪3FL、右前輪3FR、左後輪3RL、および右後輪3RR)と、左前輪3FLおよび左後輪3RLの転動を制限する駆動ユニットと、複数の車輪の向きを変える操舵装置と、制御装置とを備える。制御装置は、通常走行モードと横行モードとを切り替える際に、左前輪3FLおよび右後輪3RRの向きを変えた後に右前輪3FRおよび左後輪3RLの向きを変えるように操舵装置を制御し、さらに、左前輪3FLおよび右後輪3RRの向きを変える際に左後輪3RLの転動を制限し、右前輪3FRおよび左後輪3RLの向きを変える際に左前輪3FLの転動を制限するように駆動ユニットを制御する。
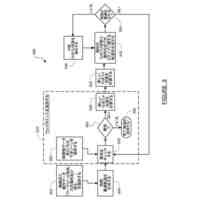
【選択図】図4
特許請求の範囲
【請求項1】
前後方向に直進走行可能な通常走行モードと左右方向に直進走行可能な横行モードとを切り替え可能な無人搬送車であって、
前後方向および左右方向に間隔を空けて設けられた複数の車輪を備え、
少なくとも2つの前記車輪の転動を制限する制動装置と、
複数の前記車輪の向きを変える操舵装置と、
前記制動装置および前記操舵装置を制御する制御装置とを備え、
前記制御装置は、
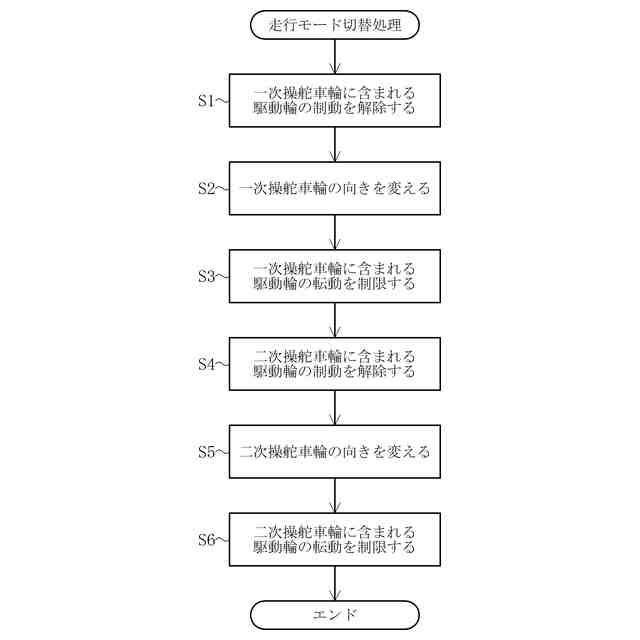
複数の前記車輪のうち、1組の前記車輪を一次操舵車輪とし、他の1組の前記車輪を二次操舵車輪として、通常走行モードと横行モードとを切り替える際に、一次操舵車輪の向きを変えた後に二次操舵車輪の向きを変えるように前記操舵装置を制御し、
さらに、一次操舵車輪の向きを変える際に二次操舵車輪に含まれる少なくとも1つの前記車輪の転動を制限し、二次操舵車輪の向きを変える際に一次操舵車輪に含まれる少なくとも1つの前記車輪の転動を制限するように前記制動装置を制御する
ことを特徴とする無人搬送車。
続きを表示(約 720 文字)
【請求項2】
前記車輪として前後方向に間隔を空けて設けられた前輪および後輪を備え、
前記前輪は、左右方向に間隔を空けて設けられた左前輪および右前輪により構成され、前記後輪は、左右方向に間隔を空けて設けられた左後輪および右後輪により構成され、
前記左前輪および前記右後輪の1組、ならびに、前記右前輪および前記左後輪の1組のうち、一方が一次操舵車輪であり、他方が二次操舵車輪である
ことを特徴とする請求項1に記載の無人搬送車。
【請求項3】
前記左前輪および前記左後輪の1組、前記右前輪および前記右後輪の1組、前記左前輪および前記右前輪の1組、ならびに、前記左後輪および前記右後輪の1組のうち、いずれか1組の転動が前記制動装置により制限される
ことを特徴とする請求項2に記載の無人搬送車。
【請求項4】
前記車輪として前後方向に間隔を空けて設けられた前輪および後輪を備え、
前記前輪は、左右方向に間隔を空けて設けられた左前輪および右前輪により構成され、前記後輪は、左右方向に間隔を空けて設けられた左後輪および右後輪により構成され、
前記左前輪および前記左後輪の1組、前記右前輪および前記右後輪の1組、前記左前輪および前記右前輪の1組、または、前記左後輪および前記右後輪の1組が、一次操舵車輪である
ことを特徴とする請求項1に記載の無人搬送車。
【請求項5】
前記左前輪および前記右後輪の1組、ならびに、前記右前輪および前記左後輪の1組のうち、一方の転動が前記制動装置により制限される
ことを特徴とする請求項4に記載の無人搬送車。
発明の詳細な説明
【技術分野】
【0001】
本発明は、通常走行モードと横行モードとを切り替え可能な無人搬送車に関するものである。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
前後方向に直進走行可能な通常走行モードと左右方向に直進走行可能な横行モードとを切り替え可能な無人搬送車が知られている(例えば特許文献1参照)。通常走行モードと横行モードとの切り替えは、車輪の向きを変えることによって行われる。
【0003】
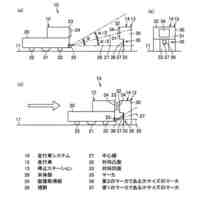
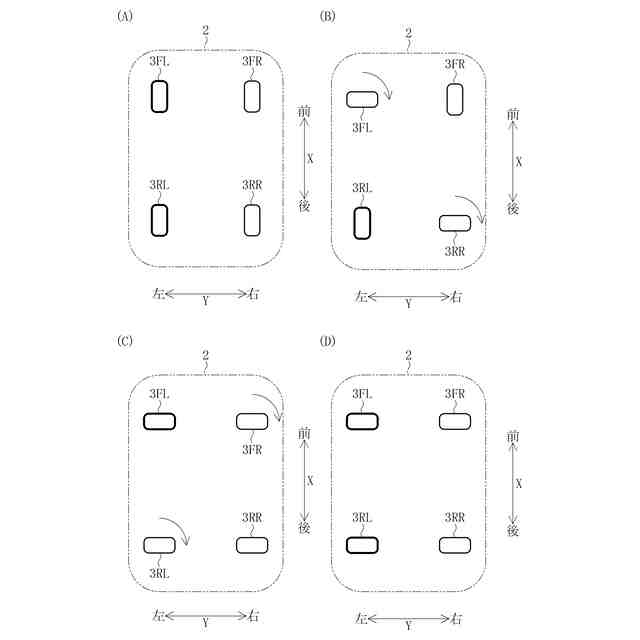
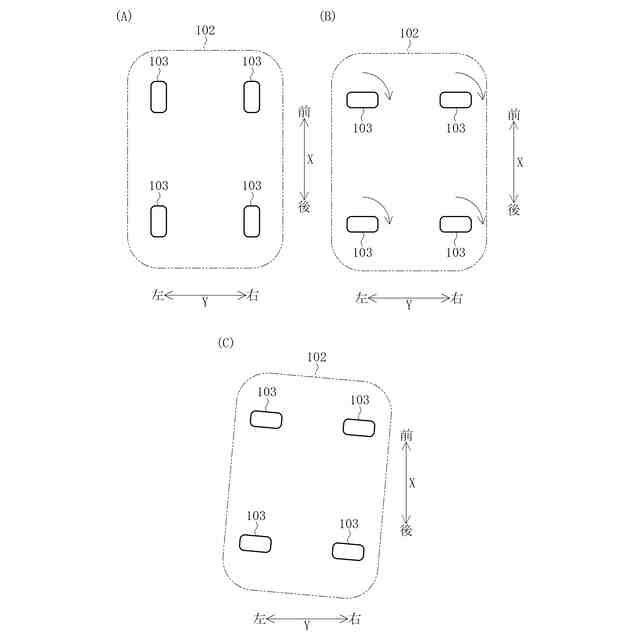
図8は、車体102と複数の車輪103とを備えた従来の無人搬送車を例示している。図8(A)に示すように、通常走行モードの無人搬送車は、車輪103が前後方向Xを向いている。通常走行モードから横行モードに切り替えるとき、図8(B)に示すように、車輪103が左右方向Yを向くように、操舵装置(図示略)が車輪103の向きを変える。このとき、路面の凹凸状態や車輪103の接地状態によって、図8(C)に示すように、車体102の姿勢が変化するという問題があった。そこで、特許文献1に記載されるように、走行に伴って車体の姿勢変化を修正することが行われている。
【0004】
しかしながら、走行に伴って車体の姿勢変化を修正するとき、通常走行モードと横行モードとを切り替えて走行を開始してから停止するまでの距離が短い場合は、車体の姿勢変化を十分に修正することができないという問題がある。
【先行技術文献】
【特許文献】
【0005】
特開2007-328442号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明は、上記事情に鑑みてなされたものであって、通常走行モードと横行モードとを切り替える際に車体の姿勢変化を抑制できる無人搬送車を提供することを課題とする。
【課題を解決するための手段】
【0007】
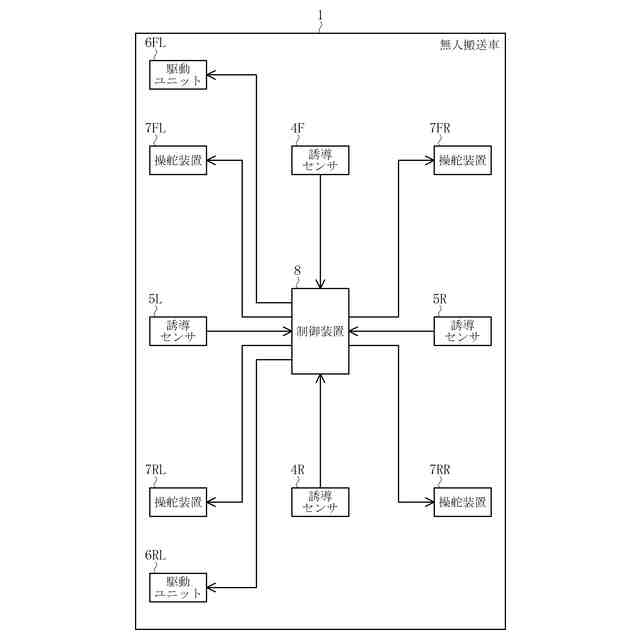
上記課題を解決するため、本発明の無人搬送車は、前後方向に直進走行可能な通常走行モードと左右方向に直進走行可能な横行モードとを切り替え可能な無人搬送車であって、前後方向および左右方向に間隔を空けて設けられた複数の車輪を備え、少なくとも2つの前記車輪の転動を制限する制動装置と、複数の前記車輪の向きを変える操舵装置と、前記制動装置および前記操舵装置を制御する制御装置とを備え、前記制御装置は、複数の前記車輪のうち、1組の前記車輪を一次操舵車輪とし、他の1組の前記車輪を二次操舵車輪として、通常走行モードと横行モードとを切り替える際に、一次操舵車輪の向きを変えた後に二次操舵車輪の向きを変えるように前記操舵装置を制御し、さらに、一次操舵車輪の向きを変える際に二次操舵車輪に含まれる少なくとも1つの前記車輪の転動を制限し、二次操舵車輪の向きを変える際に一次操舵車輪に含まれる少なくとも1つの前記車輪の転動を制限するように前記制動装置を制御することを特徴とする。
【0008】
また、前記車輪として前後方向に間隔を空けて設けられた前輪および後輪を備え、前記前輪は、左右方向に間隔を空けて設けられた左前輪および右前輪により構成され、前記後輪は、左右方向に間隔を空けて設けられた左後輪および右後輪により構成され、前記左前輪および前記右後輪の1組、ならびに、前記右前輪および前記左後輪の1組のうち、一方が一次操舵車輪であり、他方が二次操舵車輪であることが好ましい。
【0009】
また、前記左前輪および前記左後輪の1組、前記右前輪および前記右後輪の1組、前記左前輪および前記右前輪の1組、ならびに、前記左後輪および前記右後輪の1組のうち、いずれか1組の転動が前記制動装置により制限されることが好ましい。
【0010】
また、前記車輪として前後方向に間隔を空けて設けられた前輪および後輪を備え、前記前輪は、左右方向に間隔を空けて設けられた左前輪および右前輪により構成され、前記後輪は、左右方向に間隔を空けて設けられた左後輪および右後輪により構成され、前記左前輪および前記左後輪の1組、前記右前輪および前記右後輪の1組、前記左前輪および前記右前輪の1組、または、前記左後輪および前記右後輪の1組が、一次操舵車輪であることが好ましい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
エイブリック株式会社
基準電圧回路
1か月前
株式会社ダイフク
搬送設備
14日前
トヨタ自動車株式会社
ペダル機構
13日前
三菱電機株式会社
自己位置推定装置
23日前
株式会社やまびこ
走行制御装置
1か月前
トヨタ自動車株式会社
移動体、及び制御方法
21日前
株式会社タブチ
減圧弁
1か月前
株式会社計数技研
移動体、及びプログラム
14日前
WHILL株式会社
電動モビリティ
22日前
株式会社ダイヘン
搬送車
21日前
日本信号株式会社
自走式装置
28日前
ローム株式会社
半導体装置
2日前
株式会社デンソー
診断装置
1か月前
株式会社ダイヘン
移動体、及び誘導線検出装置
6日前
株式会社ダイヘン
移動体、及び誘導線検出装置
6日前
井関農機株式会社
作業車両
1か月前
FCLコンポーネント株式会社
電源回路および検出装置
1か月前
株式会社アイシン
自律移動体
28日前
株式会社アイシン
自律移動体
28日前
株式会社アイシン
自律移動体
28日前
株式会社アイシン
自律移動体
28日前
株式会社マキタ
作業ロボット
1か月前
株式会社ダイヘン
情報処理装置
21日前
横河電機株式会社
電流出力装置
15日前
株式会社東海理化電機製作所
ペダル装置
9日前
株式会社東海理化電機製作所
ペダル装置
9日前
オークラ輸送機株式会社
走行車および自律走行方法
2日前
三菱電機株式会社
状態推定装置及び移動体制御装置
24日前
株式会社東海理化電機製作所
ペダル装置
9日前
ファナック株式会社
機械プログラミング方法
1か月前
ファナック株式会社
工作機械の迅速な移動計画
1か月前
オークラ輸送機株式会社
走行車および走行車システム
2日前
個人
自動搬送車
22日前
三菱電機株式会社
移動体制御システム
24日前
三菱電機株式会社
飛行体制御装置および飛行体制御方法
21日前
ACTN株式会社
接点監視ユニット及び遠隔接点監視システム
22日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ