TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025072731
公報種別
公開特許公報(A)
公開日
2025-05-12
出願番号
2023182996
出願日
2023-10-25
発明の名称
移動体制御システム
出願人
三菱電機株式会社
代理人
弁理士法人ぱるも特許事務所
主分類
G05D
1/43 20240101AFI20250501BHJP(制御;調整)
要約
【課題】自動運転可能な移動体の異常を検知した場合に、当該移動体を待機状態に遷移させて移動体のバッテリの機能喪失の防止を実現する移動体制御システムを提供する。
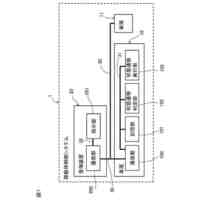
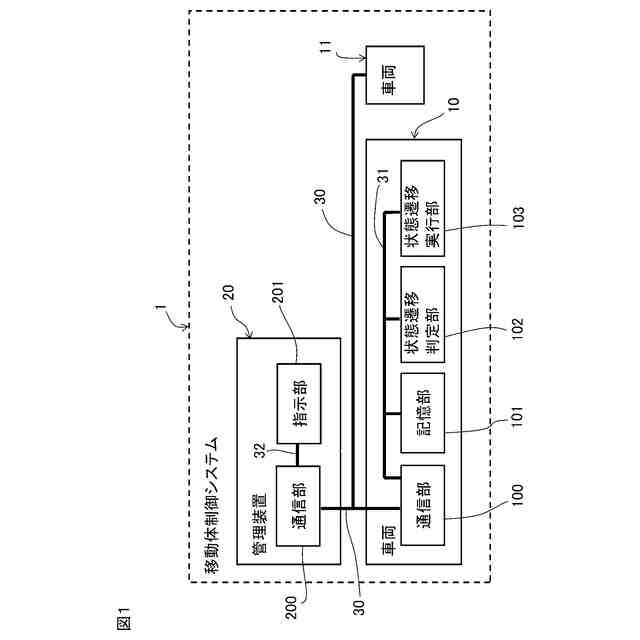
【解決手段】移動体としての車両(10)を自動運転から待機状態へ遷移させる指令を車両(10)に送信する指示部(201)を管理装置(20)に備え、車両(10)は、状態遷移判定部(102)により車両(10)の状態があらかじめ定められた条件を満たすと判定され、かつ管理装置(20)から上記指令を受信したとき、状態遷移実行部(103)により待機状態に遷移してバッテリの機能喪失を抑制するようにした移動体制御システム。
【選択図】図1
特許請求の範囲
【請求項1】
自動運転による走行が可能に構成された移動体と、前記移動体との間で相互に通信を行なうことにより前記移動体を制御する管理装置と、を有する移動体制御システムであって、
前記管理装置は、
前記移動体を前記自動運転から待機状態へ遷移させる指令を、前記通信を介して前記移動体に送信する指示部、
を備え、
前記移動体は、
前記待機状態へ遷移するための条件を記憶する記憶部と、前記条件を前記移動体が満たしているか否かを判定する状態遷移判定部と、前記移動体を前記待機状態へ遷移させる状態遷移実行部と、を備え、
前記移動体は、
前記状態遷移判定部により前記移動体の状態が前記条件を満たすと判定され、かつ前記管理装置から前記指令を前記通信を介して受信したとき、前記状態遷移実行部により前記待機状態に遷移するように構成されている、
ことを特徴とする移動体制御システム。
続きを表示(約 1,700 文字)
【請求項2】
前記移動体は、
前記状態遷移判定部が、前記条件を満たしていると判定したとき、前記管理装置に対して前記指令の送信を要求するように構成され、
前記管理装置は、
前記移動体からの前記要求に基づいて、前記通信を介して前記移動体に前記指令を送信するように構成されている、
ことを特徴とする請求項1に記載の移動体制御システム。
【請求項3】
自動運転による走行が可能に構成された移動体と、前記移動体との間で相互に通信を行なうことにより前記移動体を制御する管理装置と、を有する移動体制御システムであって、
前記管理装置は、
管理装置側の通信部と、前記管理装置側の通信部に通信路を介して相互に通信可能に接続された指示部と、
を備え、
前記移動体は、
前記管理装置側の通信部に、通信路を介して相互に通信可能に接続された移動体側の通信部と、
前記移動体が待機状態へ遷移するための条件を記憶する記憶部と、
前記条件を前記移動体が満たしているか否かを判定する状態遷移判定部と、
前記移動体を前記待機状態へ遷移させる状態遷移実行部と、
を備え、
前記移動体側の通信部と、前記記憶部と、前記状態遷移判定部と、前記状態遷移実行部と、は相互に通信路を介して通信可能に接続され、
前記状態遷移判定部は、
前記移動体の状態が前記記憶部に記憶された前記条件を満たすと判定したとき、前記待機状態への遷移を指示する指令の送信を要求するリクエストメッセージを、前記移動体側の通信路と前記管理装置側の通信路とを介して前記管理装置に送信し、
前記指示部は、
前記リクエストメッセージに応答して、前記指令を含むレスポンスメッセージを前記管理装置側の通信路と前記移動体側の通信路とを介して前記移動体に送信し、
前記状態遷移実行部は、
前記レスポンスメッセージに含まれる前記指令に基づいて、前記移動体を前記待機状態へ遷移させる、
ように構成されている、
ことを特徴とする移動体制御システム。
【請求項4】
前記移動体は、当該移動体が待機する待機場所を選択する待機場所選択部を備え、
前記待機状態に遷移した前記移動体は、前記待機場所選択部により選択された待機場所において待機するように構成されている、
ことを特徴とする請求項1から3のうちの何れか一項に記載の移動体制御システム。
【請求項5】
前記管理装置は、前記移動体が待機する待機場所を選択する待機場所選択部を備え、
前記待機状態に遷移した前記移動体は、前記待機場所選択部により選択された待機場所において待機するように構成されている、
ことを特徴とする請求項1から3のうちの何れか一項に記載の移動体制御システム。
【請求項6】
前記記憶部に記憶された前記条件は、前記移動体の運用を効率的に実施すべく前記移動体を前記待機状態に遷移させる条件を含む、
ことを特徴とする請求項1から3のうちの何れか一項に記載の移動体制御システム。
【請求項7】
前記記憶部に記憶された前記条件は、前記移動体の運用を効率的に実施すべく前記移動体を前記待機状態に遷移させる条件を含む、
ことを特徴とする請求項4に記載の移動体制御システム。
【請求項8】
前記記憶部に記憶された前記条件は、前記移動体の運用を効率的に実施すべく前記移動体を前記待機状態に遷移させる条件を含む、
ことを特徴とする請求項5に記載の移動体制御システム。
【請求項9】
前記記憶部は、前記条件と、前記移動体がとり得る動作状態を記憶するように構成されている、
ことを特徴とする請求項1から3のうちの何れか一項に記載の移動体制御システム。
【請求項10】
前記記憶部は、前記条件と、前記移動体がとり得る動作状態を記憶するように構成されている、ことを特徴とする請求項4に記載の移動体制御システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、移動体制御システムに関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
近年、自動運転、遠隔操作などの技術の進展にともない、無人運転可能な電動台車、フォークリフトなどの移動体としての車両の開発が進められ、当該車両に動作指令を与える制御装置を備えた移動体制御システムが検討されている。このような移動体制御システムにおいては、移動体としての車両に異常が発生した場合は、当該異常を制御装置に報知して車両の異常に対処することが求められる。
【0003】
従来、車両の自動運転中に、当該車両に異常が発生した場合、自動運転車両に搭載際されている電源としてのバッテリの状態に基づいて、自動運転の継続の可能性を予測し、バッテリの機能が完全に喪失する前に、自車両の周囲の他の移動体としての車両に、自車両の異常を報知するようにした装置が開示されている(たとえば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0004】
特許第7091827号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1に開示された従来の装置によれば、自車両である自動運転車両の異常を周囲の他車両に報知して対応するようにしており、自動運転車両のバッテリの機能の喪失を抑制することは考慮されていない。そのため、自動運転車両のバッテリの機能が低下し続けた場合、異常に対処するために必要な自車両の機能を確保できなくなる可能性がある。
【0006】
本開示は、上記のような課題を解決するための技術を開示するものであり、自動運転可能な移動体の異常を検知した場合に、当該移動体を待機状態に遷移させて移動体のバッテリの機能喪失の防止を実現する移動体制御システムを提供することを目的とする。
【課題を解決するための手段】
【0007】
本開示による移動体制御システムは、
自動運転による走行が可能に構成された移動体と、前記移動体との間で相互に通信を行なうことにより前記移動体を制御する管理装置と、を有する移動体制御システムであって、
前記管理装置は、
前記移動体を前記自動運転から待機状態へ遷移させる指令を、前記通信を介して前記移動体に送信する指示部、
を備え、
前記移動体は、
前記待機状態へ遷移するための条件を記憶する記憶部と、前記条件を前記移動体が満たしているか否かを判定する状態遷移判定部と、前記移動体を前記待機状態へ遷移させる状態遷移実行部と、を備え、
前記移動体は、
前記状態遷移判定部により前記移動体の状態が前記条件を満たすと判定され、かつ前記管理装置から前記指令を受信したとき、前記状態遷移実行部により前記待機状態に遷移するように構成されている、
ことを特徴とする。
【0008】
また、本開示による移動体制御システムは、
自動運転による走行が可能に構成された移動体と、前記移動体との間で相互に通信を行なうことにより前記移動体を制御する管理装置と、を有する移動体制御システムであって、
前記管理装置は、
管理装置側の通信部と、前記管理装置側の通信部に通信路を介して相互に通信可能に接続された指示部と、
を備え、
前記移動体は、
前記管理装置側の通信部に、通信路を介して相互に通信可能に接続された移動体側の通信部と、
前記移動体が待機状態へ遷移するための条件を記憶する記憶部と、
前記条件を前記移動体が満たしているか否かを判定する状態遷移判定部と、
前記移動体を前記待機状態へ遷移させる状態遷移実行部と、
を備え、
前記移動体側の通信部と、前記記憶部と、前記状態遷移判定部と、前記状態遷移実行部と、は相互に通信路を介して通信可能に接続され、
前記状態遷移判定部は、
前記移動体の状態が前記記憶部に記憶された前記条件を満たすと判定したとき、前記待機状態への遷移を指示する指令の送信を要求するリクエストメッセージを、前記移動体側の通信路と前記管理装置側の通信路とを介して前記管理装置に送信し、
前記指示部は、
前記リクエストメッセージに応答して、前記指令を含むレスポンスメッセージを前記管理装置側の通信路と前記移動体側の通信路とを介して前記移動体に送信し、
前記状態遷移実行部は、
前記レスポンスメッセージに含まれる前記指令に基づいて、前記移動体を前記待機状態へ遷移させる、
ように構成されている、
ことを特徴とする。
【発明の効果】
【0009】
本開示によれば、自動運転可能な移動体の異常を検知した場合に、当該移動体を待機状態に遷移させて移動体のバッテリの機能喪失の防止を実現する移動体制御システムが得られる。
【図面の簡単な説明】
【0010】
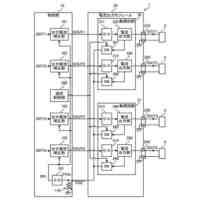
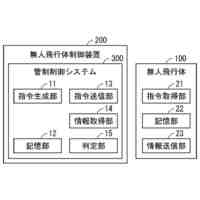
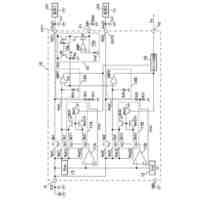
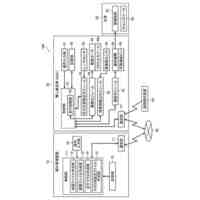
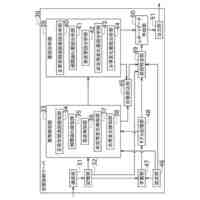
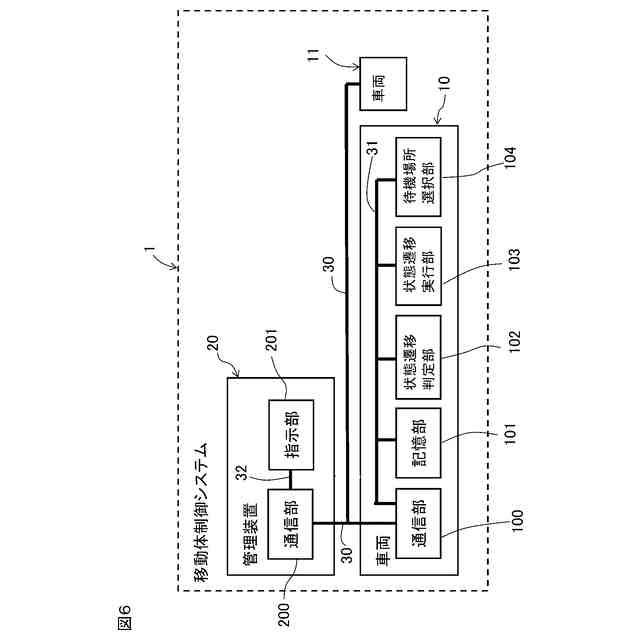
実施の形態1による移動体制御システムの構成を示す構成図である。
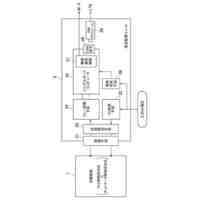
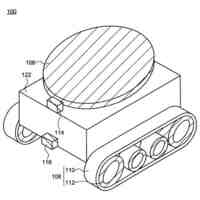
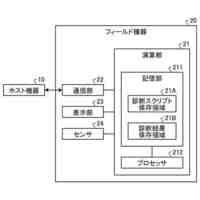
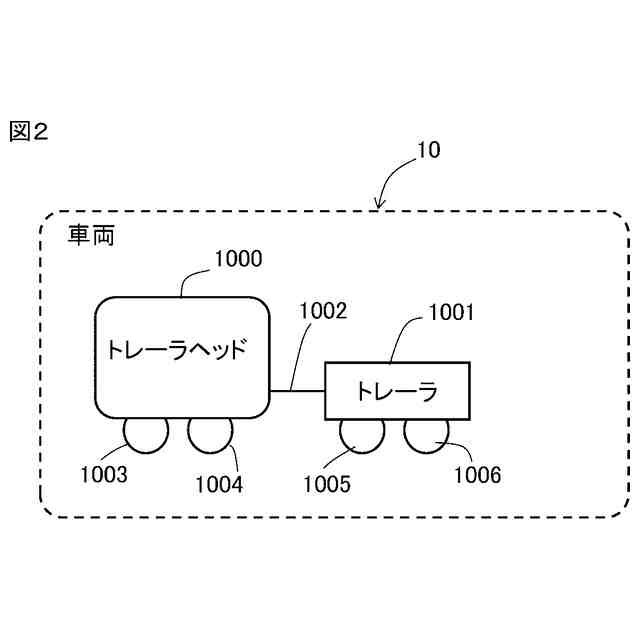
実施の形態1による移動体制御システムにおける、車両の構成を示す構成図である。
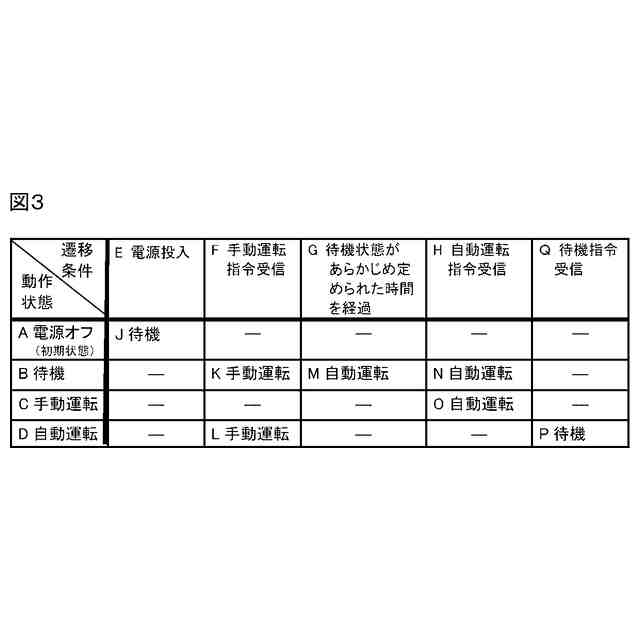
実施の形態1による移動体制御システムにおける、車両の状態遷移を示す説明図である。
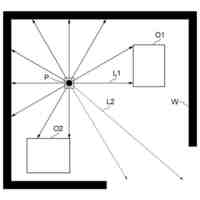
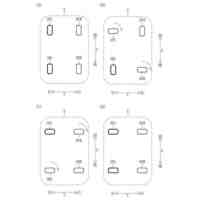
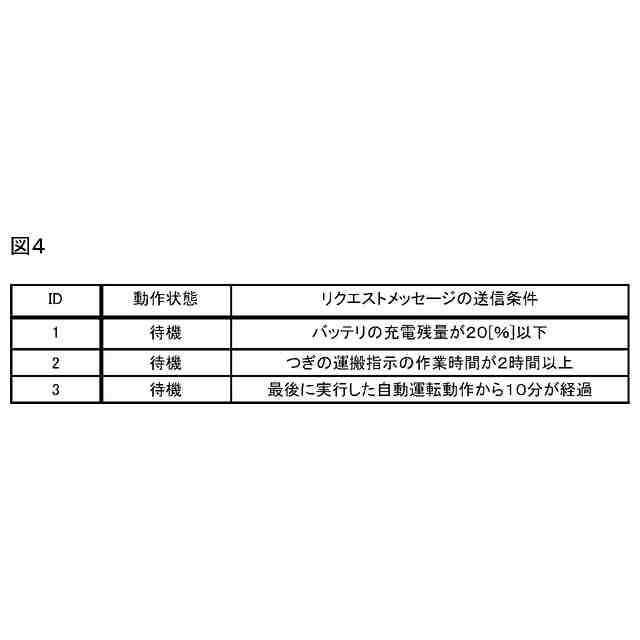
実施の形態1による移動体制御システムにおける、車両がリクエストメッセージを管理装置へ送信するための送信条件を示す説明図である。
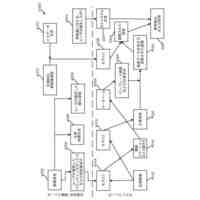
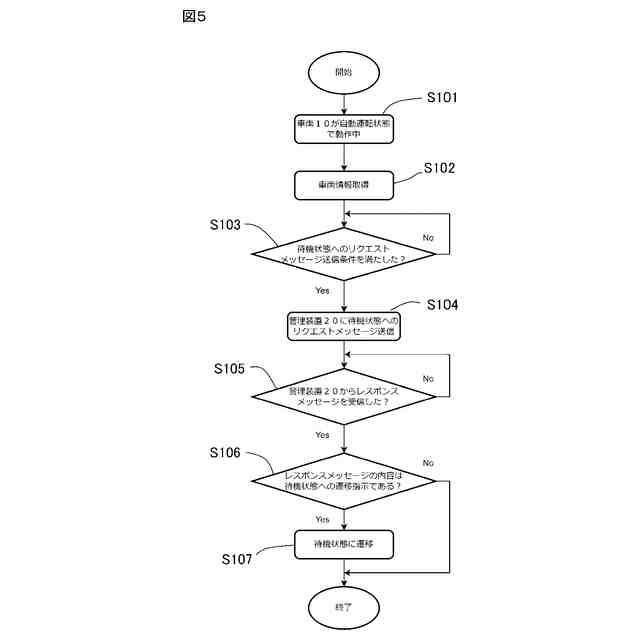
実施の形態1による移動体制御システムにおける、車両の動作を示すフローチャートである。
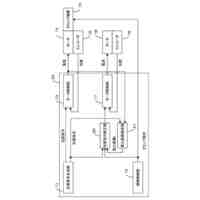
実施の形態2による移動体制御システムの構成を示す構成図である。
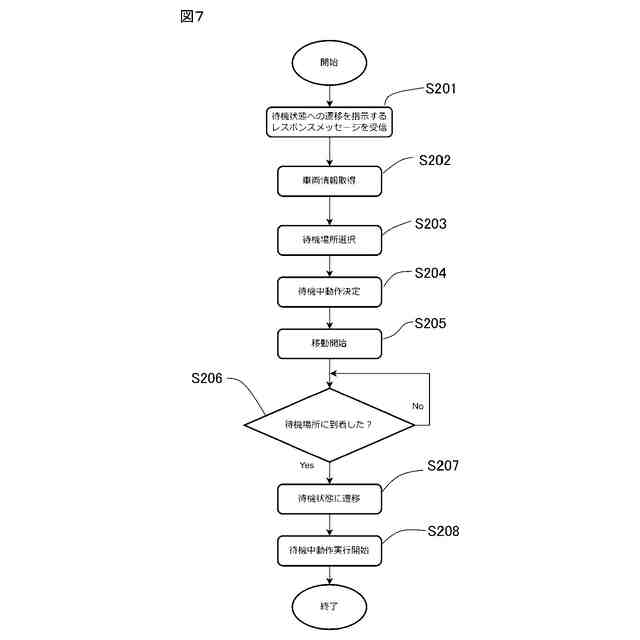
実施の形態2による移動体制御システムにおける、車両の動作を示すフローチャートである。
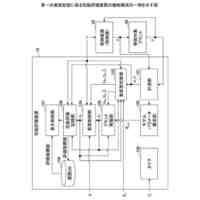
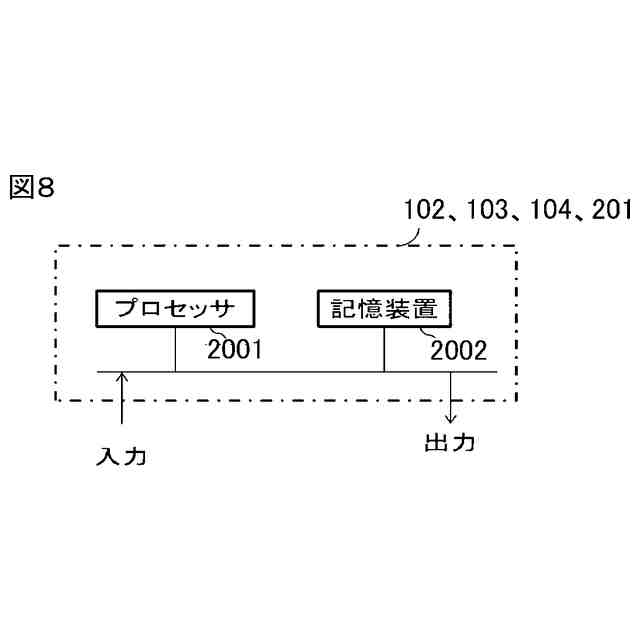
実施の形態1および実施の形態2による移動体制御システムにおける、状態遷移部、状態遷移実行部、待機場所選択部、および指示部のハードウェア構成の例を示すブロック図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
ペダル機構
11日前
株式会社ダイフク
搬送設備
12日前
三菱電機株式会社
自己位置推定装置
21日前
トヨタ自動車株式会社
移動体、及び制御方法
19日前
株式会社計数技研
移動体、及びプログラム
12日前
WHILL株式会社
電動モビリティ
20日前
株式会社ダイヘン
搬送車
19日前
株式会社ダイヘン
移動体、及び誘導線検出装置
4日前
株式会社ダイヘン
移動体、及び誘導線検出装置
4日前
株式会社東海理化電機製作所
ペダル装置
7日前
横河電機株式会社
電流出力装置
13日前
株式会社ダイヘン
情報処理装置
19日前
三菱電機株式会社
状態推定装置及び移動体制御装置
22日前
株式会社東海理化電機製作所
ペダル装置
7日前
株式会社東海理化電機製作所
ペダル装置
7日前
個人
自動搬送車
20日前
三菱電機株式会社
飛行体制御装置および飛行体制御方法
19日前
ACTN株式会社
接点監視ユニット及び遠隔接点監視システム
20日前
三菱電機株式会社
移動体制御システム
22日前
三菱ロジスネクスト株式会社
無人搬送車
4日前
株式会社東海理化電機製作所
ペダル装置
20日前
横河電機株式会社
視点補正を伴う熱イメージング
7日前
シーオス株式会社
無人搬送車および無人搬送車システム
7日前
株式会社フジタ
自動搬送ロボット
8日前
ミツミ電機株式会社
電流検出回路および電源用半導体集積回路
14日前
株式会社フジタ
自動搬送ロボット
18日前
日鉄エンジニアリング株式会社
弁制御装置及び弁制御方法
20日前
北陽電機株式会社
物体検出装置および物体検出装置が搭載される移動体
6日前
オークマ株式会社
工作機械の制御システム
7日前
シグマトロン株式会社
無人搬送システム
4日前
川崎重工業株式会社
異常検知装置、異常検知システム及び異常検知方法
21日前
富士電機株式会社
性能評価装置、性能評価方法、及びプログラム
8日前
横河電機株式会社
フィールド機器及び診断方法
15日前
ジヤトコ株式会社
自動走行システム及び自動走行車両
15日前
ファナック株式会社
センサを使用しない改良されたびびり検出
22日前
オムロン株式会社
解析装置、解析方法およびプログラム
19日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ