TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025081143
公報種別
公開特許公報(A)
公開日
2025-05-27
出願番号
2023194715
出願日
2023-11-15
発明の名称
工作機械の制御システム
出願人
オークマ株式会社
代理人
弁理士法人YKI国際特許事務所
主分類
G05B
19/416 20060101AFI20250520BHJP(制御;調整)
要約
【課題】ワークをインポジション範囲で位置決めできる工作機械の制御システムを提供する。
【解決手段】積載ユニットを駆動する第一モータ18と、前記積載ユニットに積載された被積載ユニットを駆動する第二モータ14と、前記被積載ユニットに設けられるクランプ機構15と、制御装置と、を備え、前記制御装置は、前記被積載ユニットの位置決めが完了した後、前記クランプ機構15をアンクランプ状態からクランプ状態に状態切り替えし、前記制御装置は、前記クランプ機構の状態切り替え期間中に、前記積載ユニットを位置決めする場合、前記状態切り替え期間中における前記積載ユニットの加速度上限を、通常時の加速度上限よりも下げる。
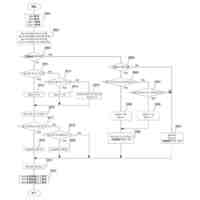
【選択図】図3
特許請求の範囲
【請求項1】
積載ユニットを駆動する第一モータと、
前記積載ユニットに積載された被積載ユニットを駆動する第二モータと、
前記積載ユニットおよび前記被積載ユニットの一方に設けられるクランプ機構と、
前記第一モータと、前記第二モータと、前記クランプ機構と、の駆動を制御する制御装置と、
を備え、
前記制御装置は、前記積載ユニットおよび前記被積載ユニットの一方である先行ユニットの位置決めが完了した後、前記先行ユニットに設けられた前記クランプ機構をアンクランプ状態からクランプ状態に状態切り替えし、
前記制御装置は、前記クランプ機構の状態切り替え期間中に、前記積載ユニットおよび前記被積載ユニットの他方である後続ユニットを位置決めする場合、前記状態切り替え期間中における前記後続ユニットの加速度上限を、通常時の加速度上限よりも下げる、
ことを特徴とする工作機械の制御システム。
続きを表示(約 3,100 文字)
【請求項2】
請求項1に記載の工作機械の制御システムであって、
前記被積載ユニットは、並進運動をする並進ユニットまたは回転運動をする回転ユニットであり、
前記積載ユニットは、並進運動をする並進ユニットまたは回転運動をする回転ユニットである、
ことを特徴とする工作機械の制御システム。
【請求項3】
請求項1に記載の工作機械の制御システムであって、
前記クランプ機構の状態切り替え期間は、前記クランプ機構へのクランプ指令のオンへの立ち上がりから、前記クランプ機構によるクランプが完了するまでの期間である、ことを特徴とする工作機械の制御システム。
【請求項4】
請求項1に記載の工作機械の制御システムであって、
前記被積載ユニットは、回転ユニットであり、
前記制御装置は、前記被積載ユニットの回転中心軸から前記被積載ユニットの重心までの距離が大きいほど、前記状態切り替え期間中における前記後続ユニットの加速度上限を下げる、
ことを特徴とする工作機械の制御システム。
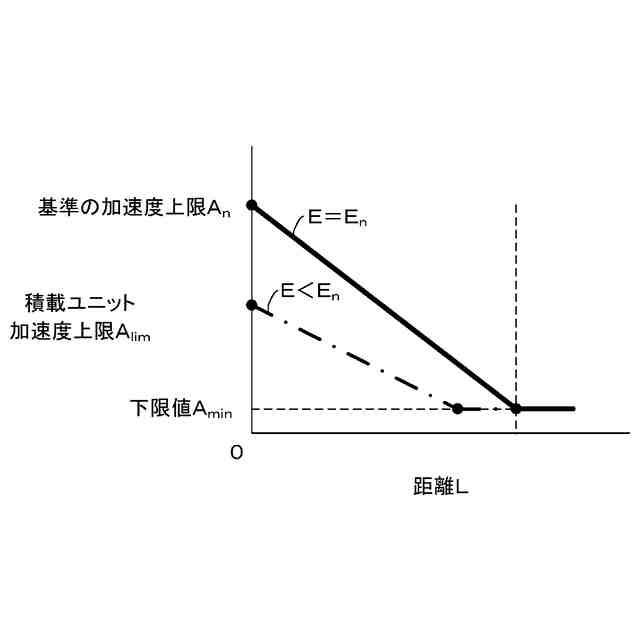
【請求項5】
請求項4に記載の工作機械の制御システムであって、
前記制御装置は、
複数の引数のうち最大値を返す関数をMAX()とし、
正の定数をk
1
とし、
前記被積載ユニットの回転中心軸から前記被積載ユニットの重心までの距離をLとし、
前記後続ユニットの基準となる加速度上限をA
n
とし、
前記被積載ユニットの基準となるインポジション範囲をE
n
とし、
前記被積載ユニットの実際のインポジション範囲をEとし、
前記後続ユニットの加速度下限値をA
min
とした場合、
前記状態切り替え期間中における前記後続ユニットの加速度上限A
lim
を
A
lim
=MAX((-k
1
L+A
n
)E/E
n
,A
min
)
により算出する、ことを特徴とする工作機械の制御システム。
【請求項6】
請求項1に記載の工作機械の制御システムであって、
前記被積載ユニットは、回転ユニットであり、
前記制御装置は、
前記被積載ユニットの回転中心軸から前記被積載ユニットの重心までの位置ベクトルと、前記積載ユニットの移動方向の単位ベクトルと、の外積を算出し、
前記外積が大きいほど、前記状態切り替え期間中における前記後続ユニットの加速度上限を下げる、
ことを特徴とする工作機械の制御システム。
【請求項7】
請求項6に記載の工作機械の制御システムであって、
前記制御装置は、
複数の引数のうち最大値を返す関数をMAX()とし、
正の定数をk
1
とし、
前記外積の大きさをL’とし、
前記後続ユニットの基準となる加速度上限をA
n
とし、
前記被積載ユニットの基準となるインポジション範囲をE
n
とし、
前記被積載ユニットの実際のインポジション範囲をEとし、
前記後続ユニットの加速度下限値をA
min
とした場合、
前記状態切り替え期間中における前記後続ユニットの加速度上限A
lim
を
A
lim
=MAX((-k
1
L’+A
n
)E/E
n
,A
min
)
により算出する、ことを特徴とする工作機械の制御システム。
【請求項8】
請求項1に記載の工作機械の制御システムであって、
前記積載ユニットおよび前記被積載ユニットは、いずれも並進ユニットであり、
前記制御装置は、
複数の引数のうち最大値を返す関数をMAX()とし、
正の定数をk
1
とし、
前記後続ユニットの基準となる加速度上限をA
n
とし、
前記被積載ユニットの基準となるインポジション範囲をE
n
とし、
前記被積載ユニットの実際のインポジション範囲をEとし、
前記後続ユニットの加速度下限値をA
min
とした場合、
前記状態切り替え期間中における前記後続ユニットの加速度上限A
lim
を
A
lim
=A
n
E/E
n
により算出する、ことを特徴とする請求項1に記載の工作機械の制御システム。
【請求項9】
請求項1に記載の工作機械の制御システムであって、
前記積載ユニットは、回転ユニットであり、
前記被積載ユニットは、並進ユニットであり、
前記制御装置は、
複数の引数のうち最大値を返す関数をMAX()とし、
正の定数をk
1
とし、
前記積載ユニットの回転中心軸から前記積載ユニットの重心までの距離をLとし、
前記後続ユニットの基準となる加速度上限をA
n
とし、
前記被積載ユニットの基準となるインポジション範囲をE
n
とし、
前記被積載ユニットの実際のインポジション範囲をEとし、
前記後続ユニットの加速度下限値をA
min
とした場合、
前記状態切り替え期間中における前記後続ユニットの加速度上限A
lim
を
A
lim
=MAX((-k
1
L+A
n
)E/E
n
,A
min
)
により算出する、ことを特徴とする工作機械の制御システム。
【請求項10】
請求項1に記載の工作機械の制御システムであって、
前記被積載ユニットは、回転ユニットであり、
前記制御装置は、
前記積載ユニットの移動方向の単位ベクトルに平行、かつ、前記被積載ユニットの回転中心軸を含む平面をPとし、
前記平面Pと、前記被積載ユニットの重心と、の距離をL’’とし、
複数の引数のうち最大値を返す関数をMAX()とし、
正の定数をk
1
とし、
前記後続ユニットの基準となる加速度上限をA
n
とし、
前記被積載ユニットの基準となるインポジション範囲をE
n
とし、
前記被積載ユニットの実際のインポジション範囲をEとし、
前記後続ユニットの加速度下限値をA
min
とした場合、
前記状態切り替え期間中における前記後続ユニットの加速度上限A
lim
を
A
lim
=MAX((-k
1
L’’+A
n
)E/E
n
,A
min
)
により算出する、
ことを特徴とする工作機械の制御システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本明細書は、モータ駆動ユニット上に積載されるモータ駆動ユニットを制御する機能を備える工作機械の制御システムに関する。
続きを表示(約 2,600 文字)
【背景技術】
【0002】
工作機械は、一般に、工具とワークの相対位置を決定し、種々の加工を行うために、モータにより駆動する駆動ユニットを備える。更に、高い自由度で加工を行うために、一つの駆動ユニット上に、追加の駆動ユニットを備える機械構造も存在する。以下では、一つの駆動ユニットを「積載ユニット」、当該積載ユニットに積載される追加の駆動ユニットを「被積載ユニット」と呼ぶ。マシニングセンタにおいて、積載ユニットと被積載ユニットとを備える構成例としては、円テーブルやトラニオンユニット等がある。円テーブルは、並進ユニットの上に回転ユニットを積載し、ワークを固定するテーブルを備える装置である。トラニオンユニットは、円テーブルと並進ユニットの間にチルト機構を備える装置である。
【0003】
これらの回転ユニットは、加工負荷によって位置がずらされないようにクランプ機構を備えるものがある。回転ユニットを割り出す場合、クランプ機構がアンクランプした後に回転ユニットを割り出し、再度クランプすることで割り出しを完了する。
【0004】
特許文献1には、ワークを固定するワークテーブルと、ワークテーブルを傾斜および旋回の2軸方向に回転させる回転ユニットと、工具を取り付ける主軸を並進3軸方向に移動させる主軸ユニットと、を備える5軸工作機械が開示されている。特許文献1では、この5軸工作機械において、ワーク位置決め時にワーク位置ずれが閾値を越えた場合にアンクランプし、位置決めをし直す。
【先行技術文献】
【特許文献】
【0005】
特許第06303357号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
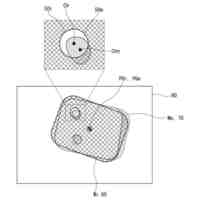
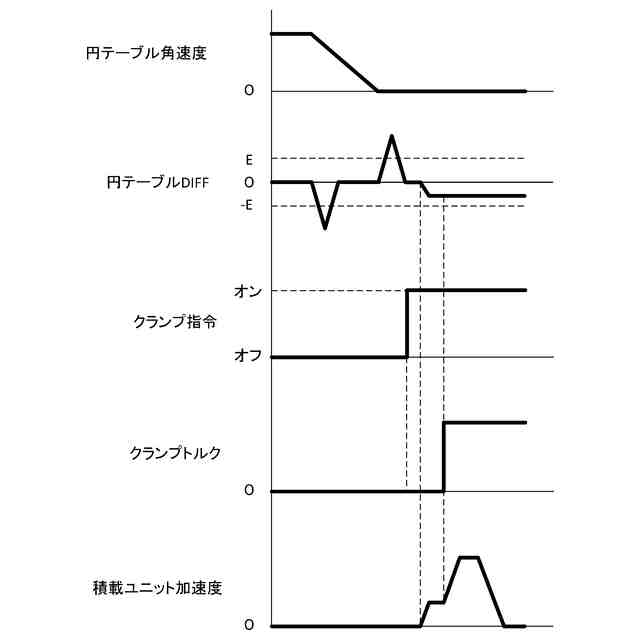
以下では、円テーブルを例にとって説明する。図1は、円テーブルを上から見た模式図である。この図1に示すように、ワーク2を含む円テーブル1全体の重心が円テーブル1の回転中心軸からずれている場合について考える。積載ユニット4は、円テーブル1を積載し、並進移動する並進ユニットである。この積載ユニット4が加減速すると、慣性力により円テーブル1を回転させるトルクが発生する。円テーブル1を割り出した後に積載ユニット4が加速する場合、図2に示すように円テーブル1の角速度(1段目)が0になった後、クランプ指令(3段目)がオンし、その直後に積載ユニット4が加速する(5段目)。ここで、クランプ指令(3段目)がオンになってから、クランプトルク(4段目)が発生するまでには機械的な遅れがある。そのため、円テーブル1のクランプ完了前(すなわちクランプトルク発生前)に慣性力によるトルクが発生し、円テーブル1が目標の割り出し位置から大きくずらされた状態でクランプされる。従って、円テーブル1の角度追従誤差(以下「DIFF」と呼ぶ、2段目)は、クランプ完了時にインポジション範囲Eの範囲外となる問題がある。
【0007】
特許文献1に記載の工作機械において同様の動作をした場合、位置決め後にずれを検出して位置決めをし直すことでずれを軽減できる。しかし、アンクランプ動作とクランプ動作を行うため、クランプ機構などの摩耗を早める可能性があるという問題がある。
【課題を解決するための手段】
【0008】
本明細書で開示する工作機械の制御システムは、積載ユニットを駆動する第一モータと、前記積載ユニットに積載された被積載ユニットを駆動する第二モータと、前記積載ユニットおよび前記被積載ユニットの一方に設けられるクランプ機構と、前記第一モータと、前記第二モータと、前記クランプ機構と、の駆動を制御する制御装置と、を備え、前記制御装置は、前記積載ユニットおよび前記被積載ユニットの一方である先行ユニットの位置決めが完了した後、前記先行ユニットに設けられた前記クランプ機構をアンクランプ状態からクランプ状態に状態切り替えし、前記制御装置は、前記クランプ機構の状態切り替え期間中に、前記積載ユニットおよび前記被積載ユニットの他方である後続ユニットを位置決めする場合、前記状態切り替え期間中における前記後続ユニットの加速度上限を、通常時の加速度上限よりも下げる、ことを特徴とする。
【発明の効果】
【0009】
本明細書に開示する工作機械の制御システムによれば、クランプ機構の状態切り替え期間中における後続ユニットの加速度上限を、通常時の加速度上限よりも下げているため、位置決め後の先行ユニットの位置ずれを効果的に防止できる。
【図面の簡単な説明】
【0010】
円テーブルの模式的な平面図である。
従来の制御システムにおける制御パラメータの時間応答を示す図である。
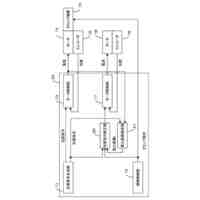
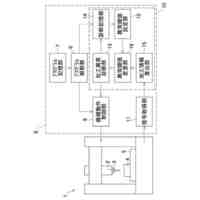
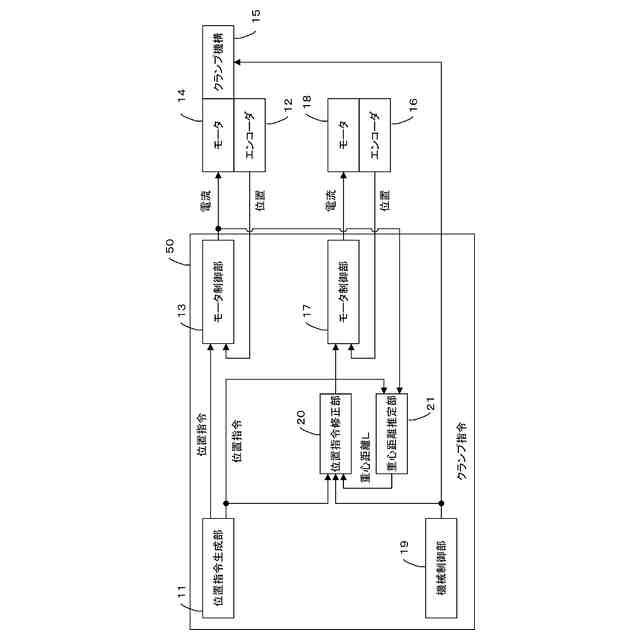
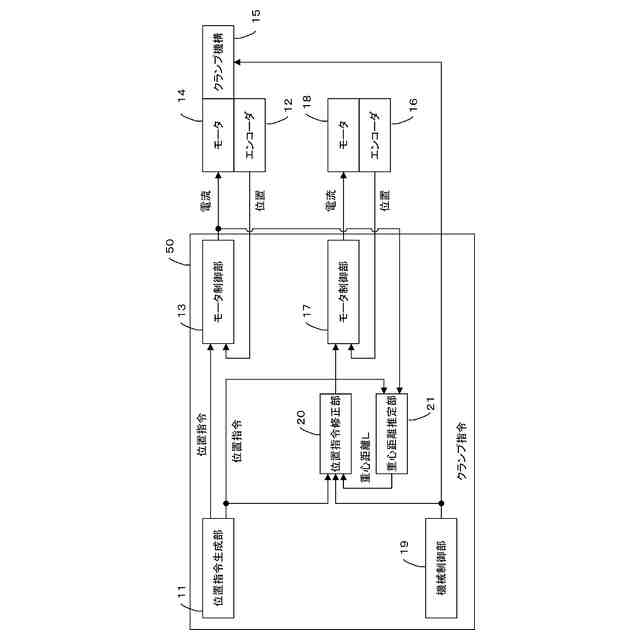
実施例1の制御システムの構成を示すブロック図である。
図3の制御システムにおける制御パラメータの時間応答を示す図である。
距離Lと積載ユニットの加速度上限A
lim
の関係を示す図である。
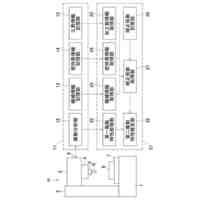
実施例2の制御システムの構成を示すブロック図である。
外積の大きさL’と積載ユニットの加速度上限A
lim
の関係を示す図である。
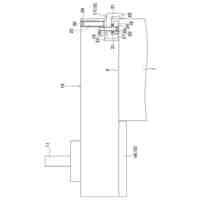
並進機構の模式的な平面図である。
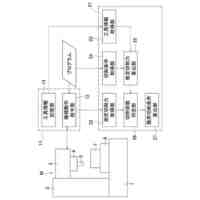
実施例3の制御システムの構成を示すブロック図である。
インポジション範囲Eと積載ユニットの加速度上限A
lim
の関係を示す図である。
U軸加工機構の模式的な平面図である。
円テーブルの模式的な斜視図である。
実施例5の制御システムの構成を示すブロック図である。
距離L’’と積載ユニットの加速度上限A
lim
の関係を示す図である。
円テーブルの模式図である。
実施例6の制御システムの構成を示すブロック図である。
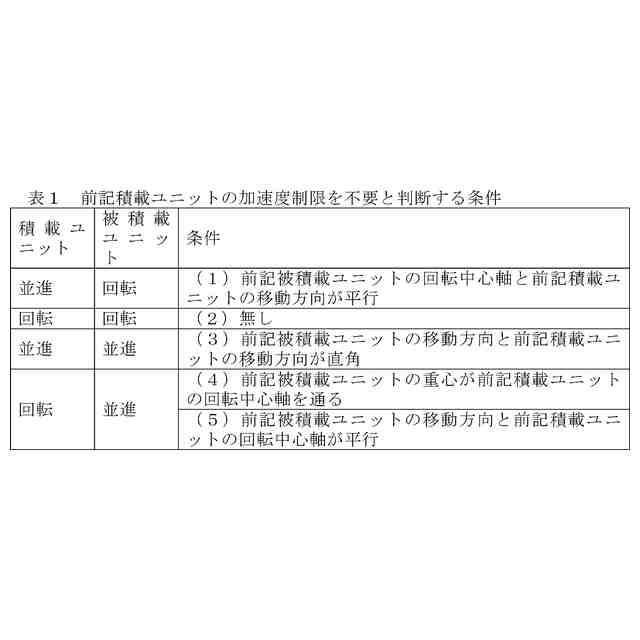
制限要否判定部が積載ユニットの加速度制限を不要と判断する条件を示す図である。
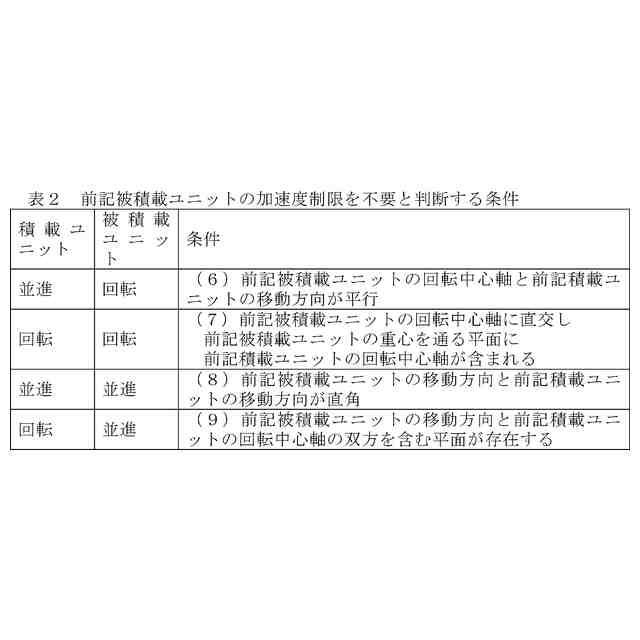
制限要否判定部が被積載ユニットの加速度制限を不要と判断する条件を示す図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
オークマ株式会社
配置特定装置
19日前
オークマ株式会社
工作機械の制御システム
5日前
オークマ株式会社
光学式リニアエンコーダ
16日前
オークマ株式会社
エンコーダ速度監視装置
23日前
オークマ株式会社
工具ホルダの位置決め機構
1か月前
オークマ株式会社
加工異常検知方法及び加工異常検知装置
23日前
オークマ株式会社
情報処理装置、プログラム、および面粗度の算出方法
19日前
オークマ株式会社
工作機械における振動特性推定システム、工作機械及び振動特性推定方法
17日前
オークマ株式会社
工作機械における切削係数同定システム、及び工作機械における切削係数同定方法
9日前
エイブリック株式会社
基準電圧回路
1か月前
株式会社クボタ
作業車
1か月前
ローム株式会社
半導体集積回路
2か月前
株式会社ダイフク
搬送車
1か月前
エイブリック株式会社
ボルテージレギュレータ
1か月前
株式会社ダイフク
搬送設備
10日前
トヨタ自動車株式会社
ペダル機構
9日前
三菱電機株式会社
自己位置推定装置
19日前
トヨタ自動車株式会社
工作機械の制御装置
1か月前
トヨタ自動車株式会社
工作機械の制御装置
1か月前
株式会社ダイフク
物品搬送設備
1か月前
トヨタ自動車株式会社
移動体、及び制御方法
17日前
株式会社やまびこ
走行制御装置
1か月前
株式会社タブチ
減圧弁
1か月前
株式会社計数技研
移動体、及びプログラム
10日前
WHILL株式会社
電動モビリティ
18日前
株式会社ダイヘン
搬送車
1か月前
日本信号株式会社
自走式装置
24日前
株式会社ダイヘン
搬送車
1か月前
株式会社ダイヘン
搬送車
17日前
株式会社ダイヘン
搬送車
1か月前
株式会社ダイヘン
搬送車
1か月前
株式会社ダイヘン
移動体、及び誘導線検出装置
2日前
井関農機株式会社
作業車両
1か月前
株式会社ダイヘン
移動体、及び誘導線検出装置
2日前
株式会社デンソー
診断装置
1か月前
ミツミ電機株式会社
多方向入力装置
1か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ