TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025076985
公報種別
公開特許公報(A)
公開日
2025-05-16
出願番号
2024119595
出願日
2024-07-25
発明の名称
逆運動学的計算時間の短縮
出願人
ザ・ボーイング・カンパニー
代理人
個人
,
個人
,
個人
主分類
B25J
9/16 20060101AFI20250509BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】時間を短縮しながらも所望の精度で逆運動学的解決を提供すること。
【解決手段】ロボットタイプのツール中心点の所望の箇所を達成するための関節パラメータの解析解を生成するために、解析ソルバがロボットタイプの設計値に基づいて使用され、ロボットアームは、ロボットタイプを有する。関節パラメータの解析解は、ロボットタイプのロボットアームの数値ソルバにシード値として提供される。数値解は、数値ソルバ及びシード値を使用して決定され、数値解は、ロボットアームのツール中心点の所望の箇所を達成するためのロボットアームの関節パラメータを含む。
【選択図】図4
特許請求の範囲
【請求項1】
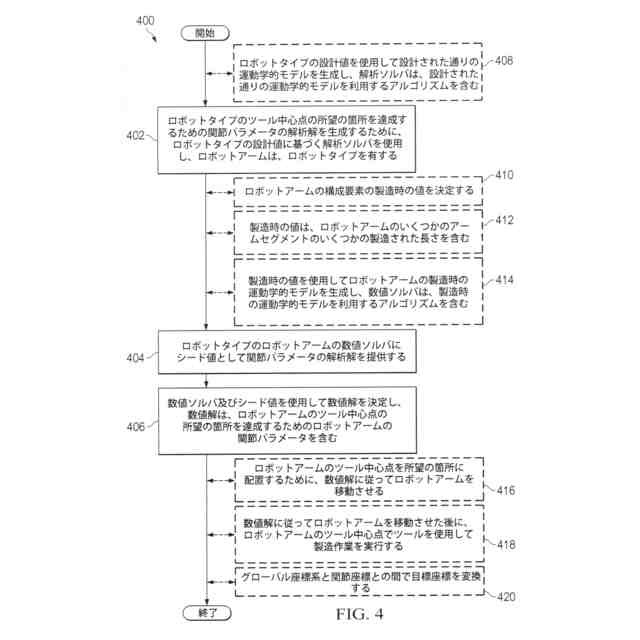
ロボットアーム(202)に対する逆運動学(248)の計算時間を短縮する方法(400)であって、
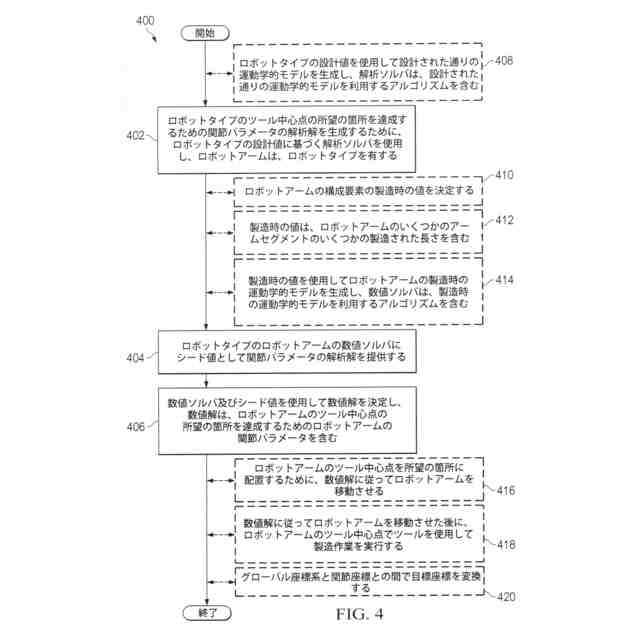
ロボットタイプ(204)の設計値(205)に基づく解析ソルバ(250)を、前記ロボットタイプ(204)のツール中心点(206)の所望の箇所(226)を達成するための関節パラメータの解析解(254)を生成するために使用するステップ(402)であって、前記ロボットアーム(202)が、前記ロボットタイプ(204)を有する、ステップ(402)と、
前記ロボットタイプ(204)の前記ロボットアーム(202)の数値ソルバ(252)にシード値(260)として前記関節パラメータの解析解(254)を提供するステップ(404)と、
前記数値ソルバ(252)及び前記シード値(260)を使用して数値解(262)を決定するステップ(406)であって、前記数値解(262)が、前記ロボットアーム(202)のツール中心点(206)の前記所望の箇所(226)を達成するための前記ロボットアーム(202)の関節パラメータ(268)を含む、ステップ(406)と、
を含む、方法(400)。
続きを表示(約 1,500 文字)
【請求項2】
前記ロボットアーム(202)の構成要素(208)の製造時の値(218)を決定するステップ(410)をさらに含む、請求項1に記載の方法(400)。
【請求項3】
前記製造時の値(218)が、前記ロボットアーム(202)の複数のアームセグメント(212)の複数の製造された長さ(216)を含む(412)、請求項2に記載の方法(400)。
【請求項4】
前記製造時の値(218)を使用して前記ロボットアーム(202)の製造時の運動学的モデル(264)を生成するステップ(414)をさらに含み、前記数値ソルバ(252)が、前記製造時の運動学的モデル(264)を利用するアルゴリズムを含む、請求項2に記載の方法(400)。
【請求項5】
前記ロボットアーム(202)の前記ツール中心点(206)を前記所望の箇所(226)に配置するために、前記数値解(262)に従って前記ロボットアーム(202)を移動させるステップ(416)をさらに含む、請求項1に記載の方法(400)。
【請求項6】
前記数値解(262)に従って前記ロボットアーム(202)を移動させた後に、前記ロボットアーム(202)の前記ツール中心点(206)でツール(222)を使用して製造作業(224)を実行するステップ(418)をさらに含む、請求項5に記載の方法(400)。
【請求項7】
前記ロボットタイプ(204)の前記設計値(205)を使用して設計された通りの運動学的モデル(258)を生成するステップ(408)をさらに含み、前記解析ソルバ(250)が、前記設計された通りの運動学的モデル(258)を利用するアルゴリズムを含む、請求項1に記載の方法(400)。
【請求項8】
前記数値解(262)を決定するステップが、グローバル座標系と関節座標との間で目標座標を変換するステップ(420)を含む、請求項1に記載の方法(400)。
【請求項9】
ロボットアーム(202)に対する逆運動学(248)の計算時間を短縮する方法(500)であって、
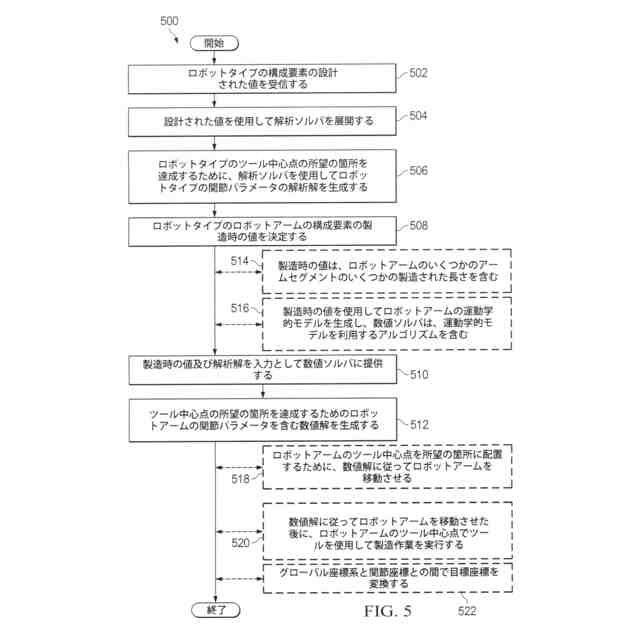
ロボットタイプ(204)の構成要素(208)の設計値(205)を受信するステップ(502)と、
前記設計値(205)を使用して解析ソルバ(250)を展開するステップ(504)と、
前記ロボットタイプ(204)のツール中心点(206)の所望の箇所(226)を達成するために、前記解析ソルバ(250)を使用して前記ロボットタイプ(204)の関節パラメータの解析解(254)を生成するステップ(506)と、
前記ロボットタイプ(204)の前記ロボットアーム(202)の前記構成要素(208)の製造時の値(218)を決定するステップ(508)と、
前記製造時の値(218)及び前記解析解(254)を入力として数値ソルバ(252)に提供するステップ(510)と、
前記ツール中心点(206)の前記所望の箇所(226)を達成するために、前記ロボットアーム(202)の関節パラメータ(268)を含む数値解(262)を生成するステップ(512)と、
を含む、方法(500)。
【請求項10】
前記ロボットアーム(202)の前記ツール中心点(206)を前記所望の箇所(226)に配置するために、前記数値解(262)に従って前記ロボットアーム(202)を移動させるステップ(518)をさらに含む、
請求項9に記載の方法(500)。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、一般に、逆運動学に関し、より具体的には、ロボットアームの逆運動学に対する計算時間を短縮することに関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
ロボットアームの動作計画では、逆運動学の計算を使用する。有意の使用のために、計算はリアルタイム計画を可能にするのに十分な速さでなければならない。しかしながら、各ロボットアームは、計算の精度に影響を及ぼす各ロボットアームのそれぞれの構成要素について、製造時の長さ値の各ロボットアーム独自の集合を有する。製造時の値で較正されたパラメータを用いた逆運動学的解決は、利用可能な解析ソルバよりも桁違いに遅くなり得る。
【発明の概要】
【発明が解決しようとする課題】
【0003】
したがって、上述した問題のうちの少なくともいくつか及び他の可能性のある問題を考慮に入れた方法及び装置を有することが望ましいであろう。例えば、時間を短縮しながらも所望の精度で逆運動学的解決を提供することが望ましいであろう。
【課題を解決するための手段】
【0004】
本開示の一実施形態は、ロボットアームに対する逆運動学の計算時間を短縮する方法を提供する。ロボットタイプのツール中心点の所望の箇所を達成するための関節パラメータの解析解を生成するために、解析ソルバがロボットタイプの設計値に基づいて使用される。ロボットアームは、ロボットタイプを有する。関節パラメータの解析解は、ロボットタイプのロボットアームの数値ソルバにシード値として提供される。数値解は、数値ソルバ及びシード値を使用して決定され、数値解は、ロボットアームのツール中心点の所望の箇所を達成するためのロボットアームの関節パラメータを含む。
【0005】
本開示の別の実施形態は、ロボットアームに対する逆運動学の計算時間を短縮する方法を提供する。ロボットタイプの構成要素の設計値が受信される。解析ソルバが、設計値を使用して展開される。ロボットタイプの関節パラメータの解析解が、ロボットタイプのツール中心点の所望の箇所を達成するために生成される。ロボットタイプのロボットアームの構成要素の製造時の値が決定される。製造時の値及び解析解は、入力として数値ソルバに提供される。ロボットアームの関節パラメータを含む数値解が、ツール中心点の所望の箇所を達成するために生成される。
【0006】
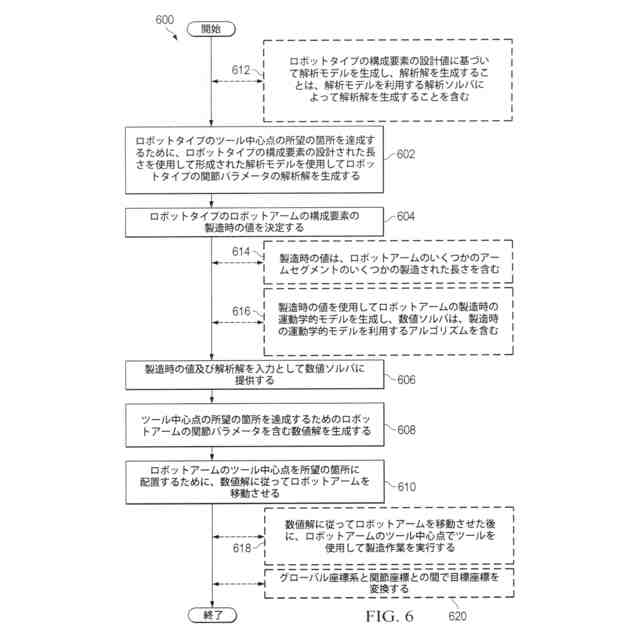
本開示のさらに別の実施形態は、ロボットアームに対する逆運動学の計算時間を短縮する方法を提供する。ロボットタイプの関節パラメータの解析解が、ロボットタイプのツール中心点の所望の箇所を達成するために、ロボットタイプの構成要素の設計された長さを使用して形成された解析モデルを使用して生成される。ロボットタイプのロボットアームの構成要素の製造時の値が決定される。製造時の値及び解析解は、入力として数値ソルバに提供される。ロボットアームの関節パラメータを含む数値解が、ツール中心点の所望の箇所を達成するために生成される。ロボットアームは、ロボットアームのツール中心点を所望の箇所に配置するために数値解に従って移動させられる。
【0007】
形態及び機能は、本開示の様々な実施形態で独立して実現することができ、又はさらなる詳細が下記の説明及び図面を参照して理解することができるさらなる他の実施形態において組み合わされてもよい。
【0008】
例示的な実施形態の特性と考えられる新規の形態は、添付の特許請求の範囲に記載されている。しかしながら、例示的な実施形態、並びにそれらの好ましい使用のモード、さらなる目的、及び形態は、添付の図面と併せて読んだ場合に本開示の例示的な実施形態の以下の詳細な説明を参照することによって、最もよく理解されよう。
【図面の簡単な説明】
【0009】
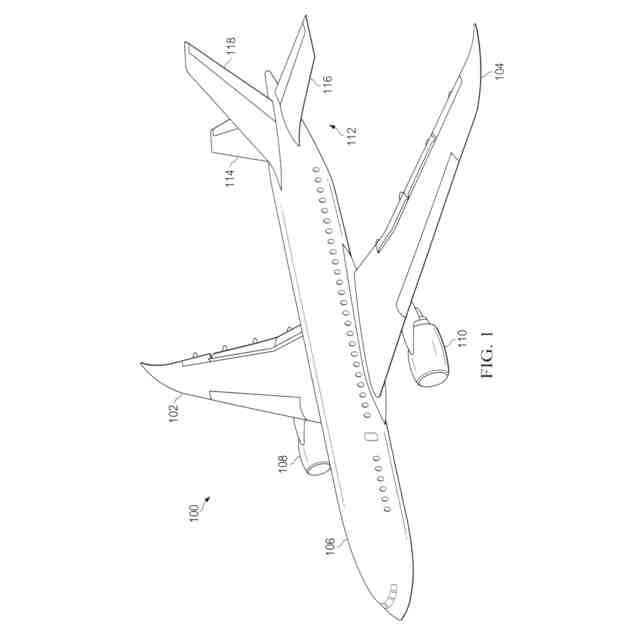
例示的な実施形態による航空機の図である。
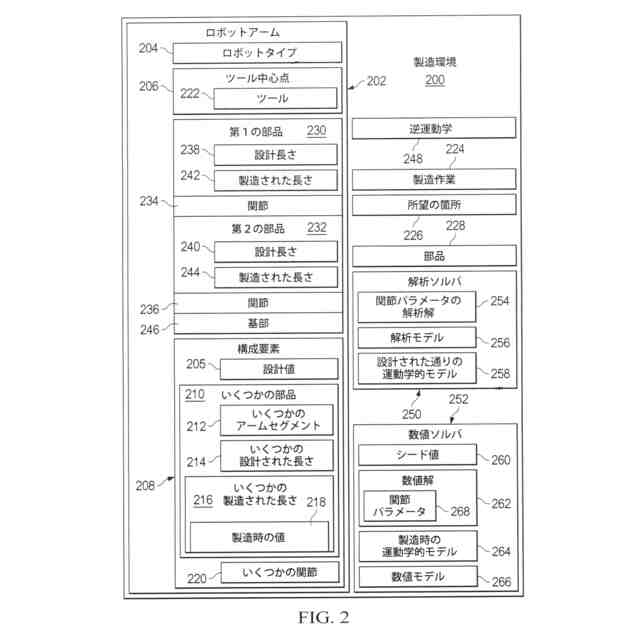
例示的な実施形態による製造環境のブロック図である。
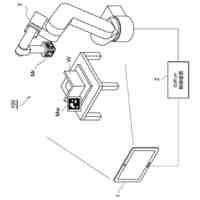
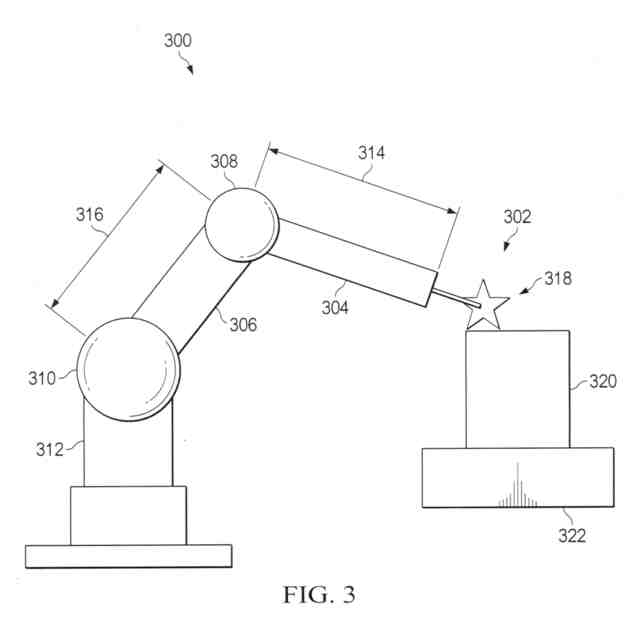
例示的な実施形態による、製造環境におけるロボットアームの図である。
例示的な実施形態による、ロボットアームに対する逆運動学の計算時間を短縮する方法のフローチャートである。
例示的な実施形態による、ロボットアームに対する逆運動学の計算時間を短縮する方法のフローチャートである。
例示的な実施形態による、ロボットアームに対する逆運動学の計算時間を短縮する方法のフローチャートである。
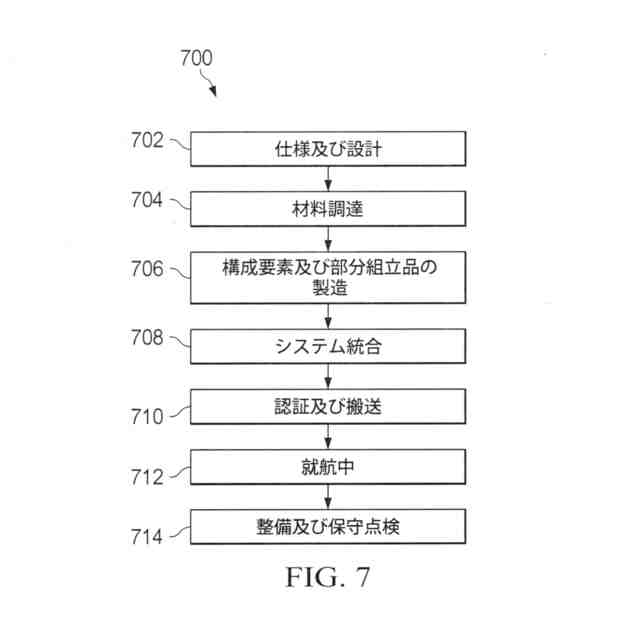
例示的な実施形態による、ブロック図の形態の航空機の製造及び保守点検方法の図である。
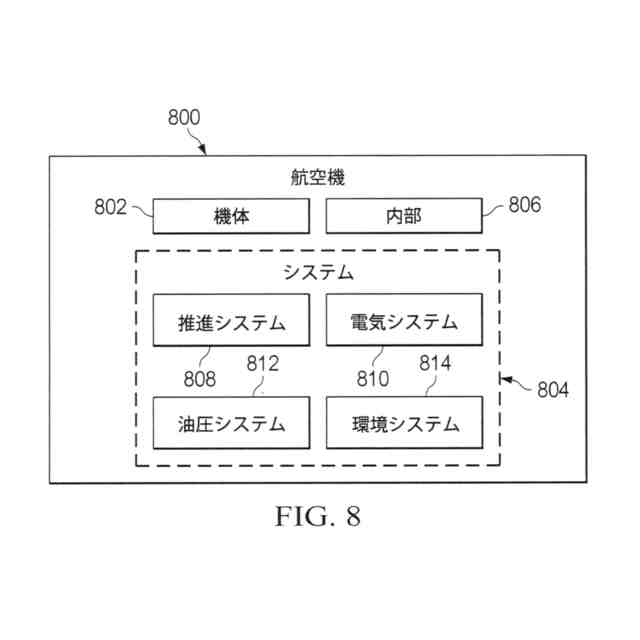
例示的な実施形態が実装され得るブロック図の形態の航空機の図である。
【発明を実施するための形態】
【0010】
例示的な例では、ロボット工学における逆運動学は、所望の先端箇所に到達するために必要な関節の角度を計算するプロセスであることを認識し、考慮に入れている。ロボットアームは、製造時又は「実際の」パラメータ、並びに角度及び関節長さを含むロボットの変数を有する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
OMC株式会社
ロボット
1か月前
株式会社クレスコ
補助吸着具
26日前
株式会社不二越
ロボット
18日前
株式会社エビス
腰ベルト用連結具
1か月前
東京都公立大学法人
対象物把持装置
1日前
工機ホールディングス株式会社
作業機
1か月前
住友重機械工業株式会社
ロボット
12日前
株式会社イノウ
給油口キャップ用開閉具
19日前
庄内機械株式会社
釘打装置
5日前
株式会社アイエイアイ
グリッパー
7日前
川崎重工業株式会社
制動システム
18日前
株式会社不二越
垂直多関節ロボット
19日前
オークラ輸送機株式会社
ハンド装置
今日
トヨタ自動車東日本株式会社
搬送治具
5日前
芝浦機械株式会社
双腕ロボット
11日前
アイホン株式会社
ネジ締めカウントシステム
20日前
トヨタ自動車株式会社
荷姿影響緩和方法
8日前
株式会社デンソーウェーブ
ロボット制御システム
1か月前
パナソニック株式会社
工具
19日前
パナソニック株式会社
工具
19日前
アピュアン株式会社
エアー式衝撃工具
1か月前
株式会社マキタ
電動工具
5日前
住友重機械工業株式会社
ロボット及びカバー
12日前
学校法人法政大学
装着型アシスト装置
1か月前
株式会社ダイヘン
端末装置
5日前
智頭電機株式会社
箱体把持装置、および、箱体把持方法
12日前
住友重機械工業株式会社
アクチュエータ支持部材
11日前
株式会社マキタ
打ち込み工具
20日前
株式会社マキタ
打ち込み工具
5日前
株式会社マキタ
打ち込み工具
5日前
株式会社マキタ
インパクト工具
1か月前
株式会社マキタ
インパクト工具
1か月前
中国電力株式会社
電動ドライバー
1か月前
株式会社不二越
ロボットの教示システム及び教示方法
1か月前
SB C&S株式会社
治具セット
1か月前
オムロン株式会社
モバイルロボット
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ