TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025071274
公報種別
公開特許公報(A)
公開日
2025-05-02
出願番号
2025026812,2021020731
出願日
2025-02-21,2021-02-12
発明の名称
溶接装置および方法並びにプログラム
出願人
三菱重工業株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
B25J
13/08 20060101AFI20250424BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】溶接装置および方法並びにプログラムにおいて、溶接精度の向上を図る。
【解決手段】第1の部材と第2の部材と第3の部材とが直交するように連結されて構成される溶接対象物の溶接装置であって、溶接ロボットと、溶接ロボットを制御する制御装置と、を備え、制御装置は、第1の部材における第1の方向の位置と前記第1の方向に直交する第2の方向の傾きを有する第1の3次元計測データを算出し、第1の部材における第2の方向の位置を有する第2の3次元計測データを算出し、第2の部材における第1の方向および第2の方向に直交する第3の方向の位置と前記第2の方向の傾きを有する第3の3次元計測データを算出し、溶接対象物の3次元設計データと第1の3次元計測データと第2の3次元計測データと第3の3次元計測データとに基づいて溶接ロボットにおける基準点に対する溶接対象物の3次元座標を規定し、溶接対象物の3次元座標に基づいて溶接ロボットを制御して溶接を行う。
【選択図】図3
特許請求の範囲
【請求項1】
第1の部材と第2の部材と第3の部材とが直交するように連結されて構成される溶接対象物の溶接装置であって、
溶接ロボットと、
前記溶接ロボットを制御する制御装置と、
を備え、
前記制御装置は、
前記第1の部材における第1の方向の位置と前記第1の方向に直交する第2の方向の傾きを有する第1の3次元計測データを算出し、
前記第1の部材における前記第2の方向の位置を有する第2の3次元計測データを算出し、
前記第2の部材における前記第1の方向および前記第2の方向に直交する第3の方向の位置と前記第2の方向の傾きを有する第3の3次元計測データを算出し、
前記溶接対象物の3次元設計データと前記第1の3次元計測データと前記第2の3次元計測データと前記第3の3次元計測データとに基づいて溶接ロボットにおける基準点に対する前記溶接対象物の3次元座標を規定し、
前記溶接対象物の3次元座標に基づいて前記溶接ロボットを制御して溶接を行う、
溶接装置。
続きを表示(約 1,700 文字)
【請求項2】
タッチプローブを前記第1の方向に移動して前記第1の部材に当接させることで前記第2の方向の2か所で前記第1の部材における前記第1の方向の2つの位置座標を求め、前記制御装置は、前記第1の部材における前記第1の方向の位置および前記第2の方向の傾きを算出し、
タッチプローブを前記第2の方向に移動して前記第1の部材に当接させることで前記第1の部材における前記第2の方向の位置座標を求め、前記制御装置は、前記第1の部材における前記第2の方向の位置を算出し、
タッチプローブを前記第3の方向に移動して前記第2の部材に当接させることで前記第2の方向の2か所で前記第2の部材における前記第3の方向の2つの位置座標を求め、前記制御装置は、前記第2の部材における前記第3の方向の位置および前記第2の方向の傾きを算出する、
請求項1に記載の溶接装置。
【請求項3】
前記制御装置は、
前記溶接対象物の3次元設計データと前記第1の3次元計測データと前記第2の3次元計測データと前記第3の3次元計測データとに基づいて前記第1の部材と前記第2の部材と前記第3の部材が連結される角の3次元座標を算出し、
前記角の3次元座標に基づいて前記溶接対象物の中心位置の3次元座標を算出し、
前記溶接対象物の中心位置を原点とした前記溶接対象物の3次元座標を算出する、
請求項1に記載の溶接装置。
【請求項4】
前記制御装置は、前記溶接ロボットの先端部を溶接区画に移動し、タッチプローブにより溶接線をセンシングした後、センシングにより求めた前記溶接線に沿う領域での前記第1の部材と前記第2の部材と前記第3の部材の位置および傾きに基づいて前記溶接線に沿った3次元座標を算出し、前記溶接対象物の3次元座標を補正する、
請求項1に記載の溶接装置。
【請求項5】
第1の部材と第2の部材と第3の部材が連結されて構成される溶接対象物の溶接方法であって、
前記第1の部材における第1の方向の位置と前記第1の方向に直交する第2の方向の傾きを有する第1の3次元計測データを算出するステップと、
前記第1の部材における前記第2の方向の位置を有する第2の3次元計測データを算出するステップと、
前記第2の部材における前記第1の方向および前記第2の方向に直交する第3の方向の位置と前記第2の方向の傾きを有する第3の3次元計測データを算出するステップと、
前記溶接対象物の3次元設計データと前記第1の3次元計測データと前記第2の3次元計測データと前記第3の3次元計測データとに基づいて溶接ロボットにおける基準点に対する前記溶接対象物の3次元座標を規定するステップと、
前記溶接対象物の3次元座標に基づいて溶接ロボット制御して溶接を行うステップと、
を有する溶接方法。
【請求項6】
第1の部材と第2の部材と第3の部材が連結されて構成される溶接対象物の溶接するためのプログラムであって、
前記第1の部材における第1の方向の位置と前記第1の方向に直交する第2の方向の傾きを有する第1の3次元計測データを算出するステップと、
前記第1の部材における前記第2の方向の位置を有する第2の3次元計測データを算出するステップと、
前記第2の部材における前記第1の方向および前記第2の方向に直交する第3の方向の位置と前記第2の方向の傾きを有する第3の3次元計測データを算出するステップと、
前記溶接対象物の3次元設計データと前記第1の3次元計測データと前記第2の3次元計測データと前記第3の3次元計測データとに基づいて溶接ロボットにおける基準点に対する前記溶接対象物の3次元座標を規定するステップと、
前記溶接対象物の3次元座標に基づいて溶接ロボット制御して溶接を行うステップと、
を溶接装置として動作するコンピュータに実行させるプログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、ロボットを用いて溶接を行う溶接装置および方法並びにプログラムに関するものである。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
溶接ロボットを用いて自動溶接作業を実施するとき、溶接対象物を所定の位置に固定し、タッチセンシングなどにより溶接対象物における溶接位置を検出する。そして、溶接ロボットを自動制御することで、溶接トーチを溶接位置に沿って移動して溶接を行う。このような溶接装置としては、例えば、下記特許文献に記載されたものがある。
【先行技術文献】
【特許文献】
【0003】
特許第3355243号公報
特許第4353857号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、溶接対象物の溶接位置に沿って溶接を行うと、溶接対象物に熱歪みが発生する。溶接対象物に熱歪みが発生すると、次に溶接を行う溶接位置がずれ、溶接精度が低下してしまうという課題がある。
【0005】
本開示は、上述した課題を解決するものであり、溶接精度の向上を図る溶接装置および方法並びにプログラムを提供することを目的とする。
【課題を解決するための手段】
【0006】
上記の目的を達成するための本開示の溶接装置は、第1の部材と第2の部材と第3の部材とが直交するように連結されて構成される溶接対象物の溶接装置であって、溶接ロボットと、前記溶接ロボットを制御する制御装置と、を備え、前記制御装置は、前記第1の部材における第1の方向の位置と前記第1の方向に直交する第2の方向の傾きを有する第1の3次元計測データを算出し、前記第1の部材における前記第2の方向の位置を有する第2の3次元計測データを算出し、前記第2の部材における前記第1の方向および前記第2の方向に直交する第3の方向の位置と前記第2の方向の傾きを有する第3の3次元計測データを算出し、前記溶接対象物の3次元設計データと前記第1の3次元計測データと前記第2の3次元計測データと前記第3の3次元計測データとに基づいて溶接ロボットにおける基準点に対する前記溶接対象物の3次元座標を規定し、前記溶接対象物の3次元座標に基づいて前記溶接ロボットを制御して溶接を行う。
【0007】
また、本開示の溶接方法は、第1の部材と第2の部材と第3の部材が連結されて構成される溶接対象物の溶接方法であって、前記第1の部材における第1の方向の位置と前記第1の方向に直交する第2の方向の傾きを有する第1の3次元計測データを算出するステップと、前記第1の部材における前記第2の方向の位置を有する第2の3次元計測データを算出するステップと、前記第2の部材における前記第1の方向および前記第2の方向に直交する第3の方向の位置と前記第2の方向の傾きを有する第3の3次元計測データを算出するステップと、前記溶接対象物の3次元設計データと前記第1の3次元計測データと前記第2の3次元計測データと前記第3の3次元計測データとに基づいて溶接ロボットにおける基準点に対する前記溶接対象物の3次元座標を規定するステップと、前記溶接対象物の3次元座標に基づいて溶接ロボット制御して溶接を行うステップと、を有する。
【0008】
また、本開示のプログラムは、第1の部材と第2の部材と第3の部材が連結されて構成される溶接対象物の溶接するためのプログラムであって、前記第1の部材における第1の方向の位置と前記第1の方向に直交する第2の方向の傾きを有する第1の3次元計測データを算出するステップと、前記第1の部材における前記第2の方向の位置を有する第2の3次元計測データを算出するステップと、前記第2の部材における前記第1の方向および前記第2の方向に直交する第3の方向の位置と前記第2の方向の傾きを有する第3の3次元計測データを算出するステップと、前記溶接対象物の3次元設計データと前記第1の3次元計測データと前記第2の3次元計測データと前記第3の3次元計測データとに基づいて溶接ロボットにおける基準点に対する前記溶接対象物の3次元座標を規定するステップと、前記溶接対象物の3次元座標に基づいて溶接ロボット制御して溶接を行うステップと、を溶接装置として動作するコンピュータに実行させる。
【発明の効果】
【0009】
本開示の溶接装置および方法並びにプログラムによれば、溶接精度の向上を図ることができる。
【図面の簡単な説明】
【0010】
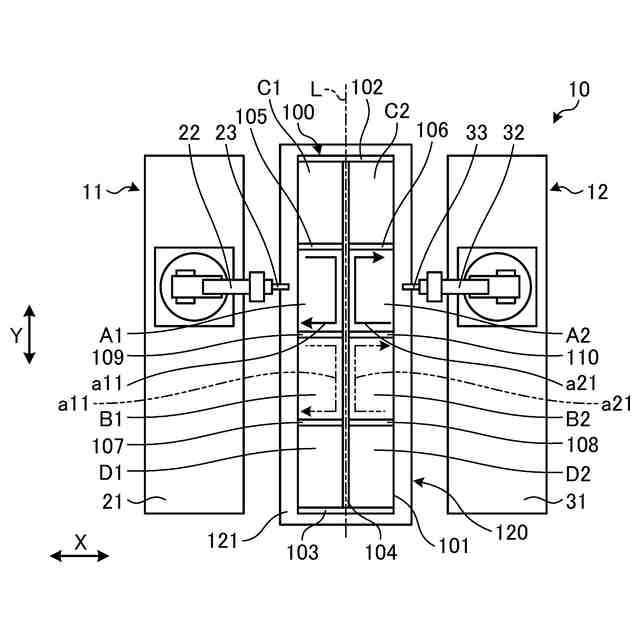
図1は、本実施形態の溶接装置を表す平面概略図である。
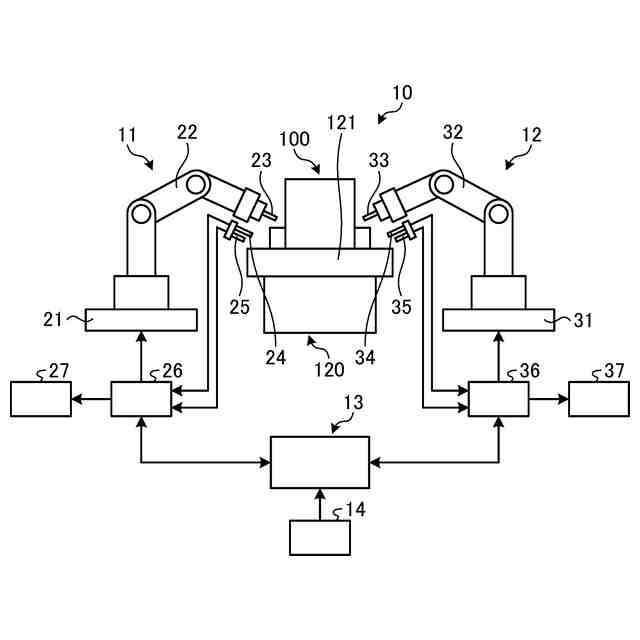
図2は、溶接装置を表す概略構成図である。
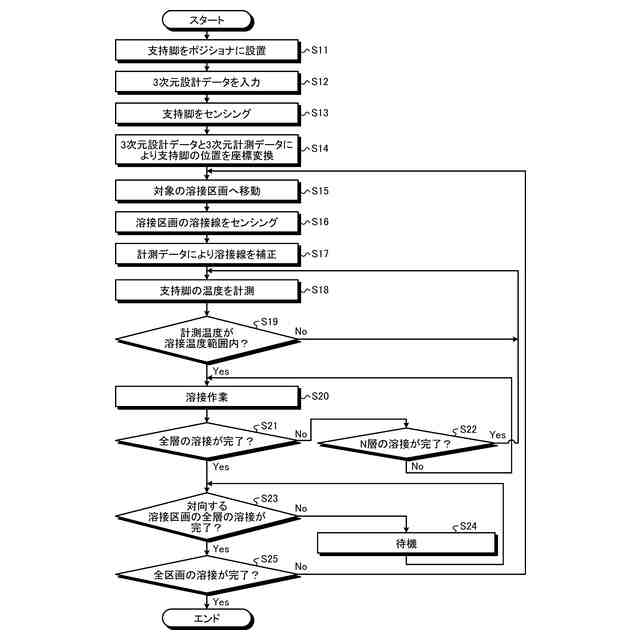
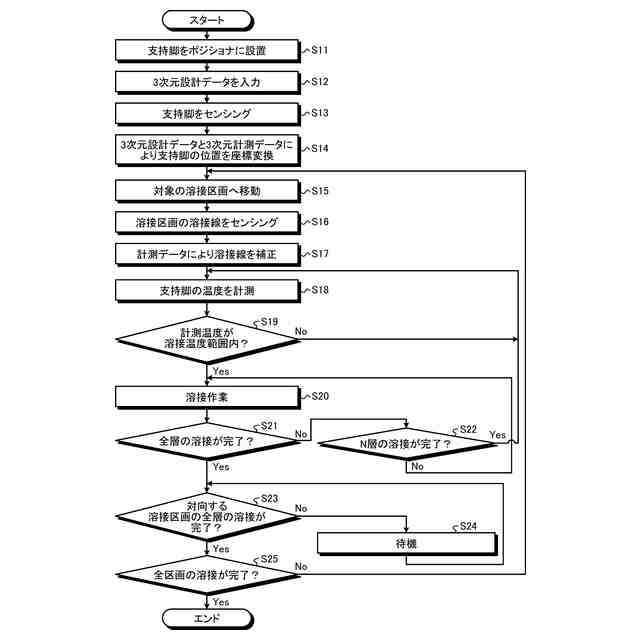
図3は、本実施形態の溶接装置による溶接方法を表すフローチャートである。
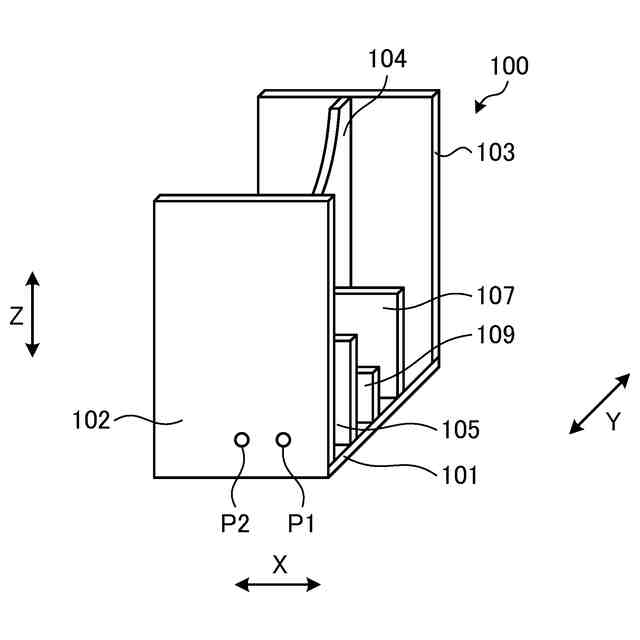
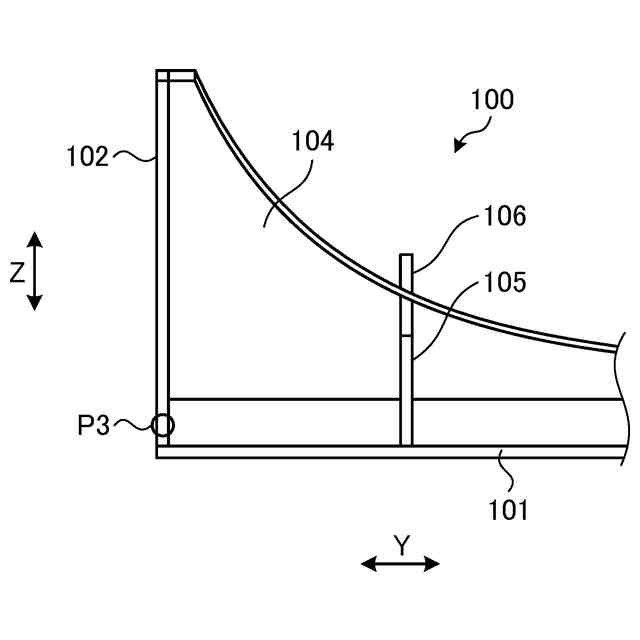
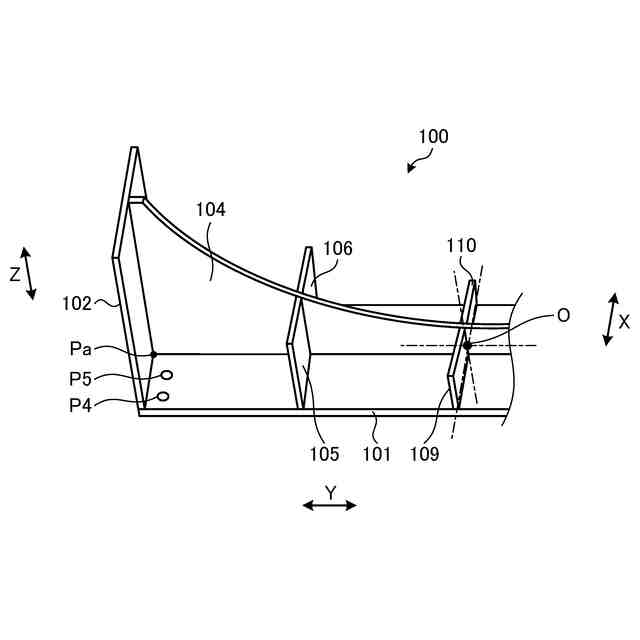
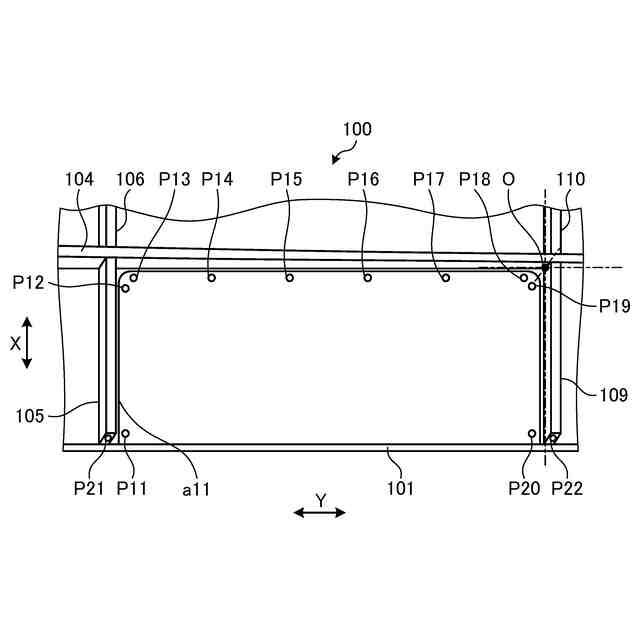
図4は、支持脚の座標設定時におけるセンシング箇所を表す概略図である。
図5は、支持脚の座標設定時におけるセンシング箇所を表す概略図である。
図6は、支持脚の座標設定時におけるセンシング箇所を表す概略図である。
図7は、支持脚の教示位置の補正時におけるセンシング箇所を表す概略図である。
図8は、支持脚の教示位置の補正時におけるセンシング箇所を表す概略図である。
図9は、水平方向に沿う溶接部を表す説明図である。
図10は、鉛直方向に沿う溶接部を表す説明図である。
図11は、支持脚を表す斜視図である。
図12は、支持脚を表す平面図である。
図13は、支持脚のポジショナを表す平面図である。
図14は、支持脚のポジショナを表す側面図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
OMC株式会社
ロボット
17日前
川崎重工業株式会社
ハンド
1か月前
株式会社クレスコ
補助吸着具
10日前
株式会社不二越
ロボット
1か月前
個人
けがき用治具
1か月前
株式会社不二越
ロボット
2日前
個人
深孔スリーブ駆動ロッド構造
1か月前
株式会社エビス
腰ベルト用連結具
17日前
株式会社不二越
ロボット操作装置
1か月前
川崎重工業株式会社
ロボット
1か月前
個人
バール
1か月前
株式会社黒澤鉄工製作所
けがき用治具
1か月前
株式会社デンソー
操縦桿
1か月前
川崎重工業株式会社
ロボットシステム
1か月前
工機ホールディングス株式会社
作業機
25日前
川崎重工業株式会社
制動システム
2日前
梅馨堂合同会社
人協働ロボットシステム
1か月前
株式会社イノウ
給油口キャップ用開閉具
3日前
ARMA株式会社
UI付エンドエフェクタ
1か月前
株式会社不二越
垂直多関節ロボット
3日前
アイホン株式会社
ネジ締めカウントシステム
4日前
パナソニック株式会社
工具
3日前
パナソニック株式会社
工具
3日前
株式会社デンソーウェーブ
ロボット制御システム
23日前
学校法人法政大学
装着型アシスト装置
27日前
アピュアン株式会社
エアー式衝撃工具
20日前
株式会社マキタ
作業機
1か月前
若井ホールディングス株式会社
レンチ構造とその製造方法
1か月前
三菱電機株式会社
トルク締め個所検出システム
1か月前
株式会社マキタ
打ち込み工具
4日前
株式会社マキタ
インパクト工具
18日前
株式会社マキタ
インパクト工具
18日前
高丸工業株式会社
ロボット操作システムの動作方法
1か月前
中国電力株式会社
電動ドライバー
24日前
シブヤパッケージングシステム株式会社
物品移載装置
1か月前
SB C&S株式会社
治具セット
17日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ


































