TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025069866
公報種別
公開特許公報(A)
公開日
2025-05-01
出願番号
2023179851
出願日
2023-10-18
発明の名称
モータ制御方法
出願人
トヨタ自動車株式会社
代理人
個人
,
個人
,
個人
主分類
H02P
21/06 20160101AFI20250423BHJP(電力の発電,変換,配電)
要約
【課題】磁石温度の変化によらずにトルクを調整することができ、トルク乖離しても所望のトルク出力を得ることができるモータ制御方法を提供する。
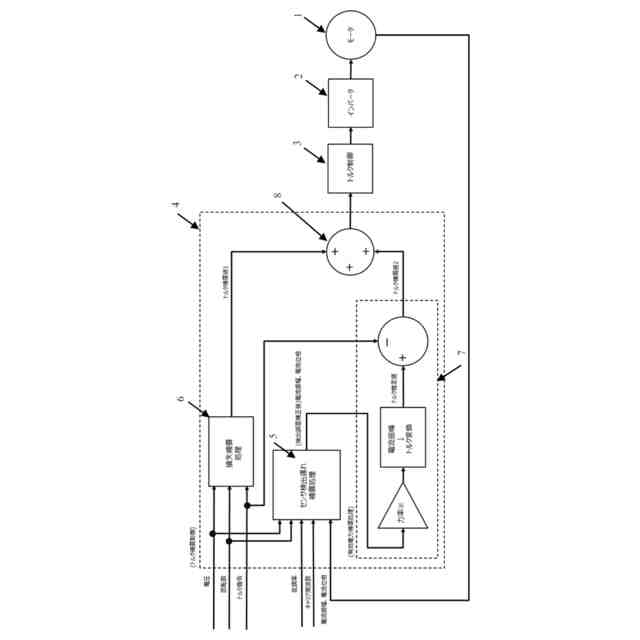
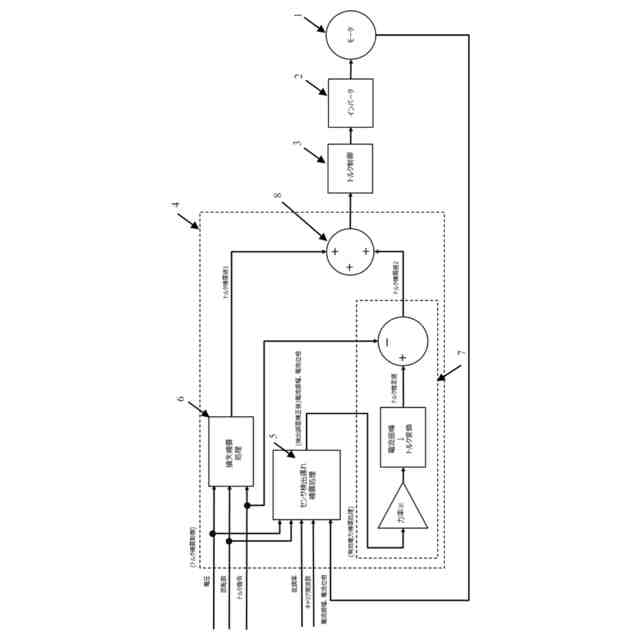
【解決手段】モータ制御方法は、外部から入力する指令に基づいてモータを制御するモータ制御方法であって、トルク指令値算出部と、トルク指令値を補償するトルク補償値を算出するトルク補償値算出部と、を有し、前記トルク補償値算出部は、モータの各センサから取得したから力率と電流振幅を算出し、力率、電流振幅、モータ回転数、電圧から前記トルク補償値を算出し、前記トルク補償値によってトルク指令算出値を補正する。
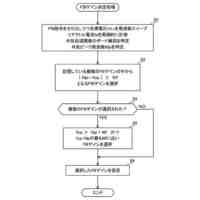
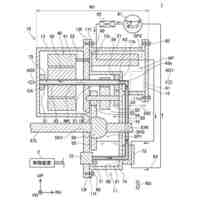
【選択図】図1
特許請求の範囲
【請求項1】
外部から入力する指令に基づいてモータを制御するモータ制御方法であって、
トルク指令値算出部と、
トルク指令値を補償するトルク補償値を算出するトルク補償値算出部と、
を有し、
前記トルク補償値算出部は、
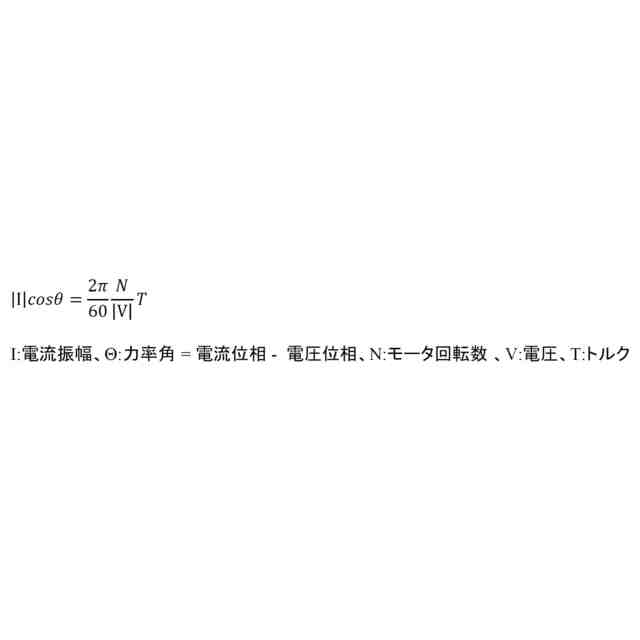
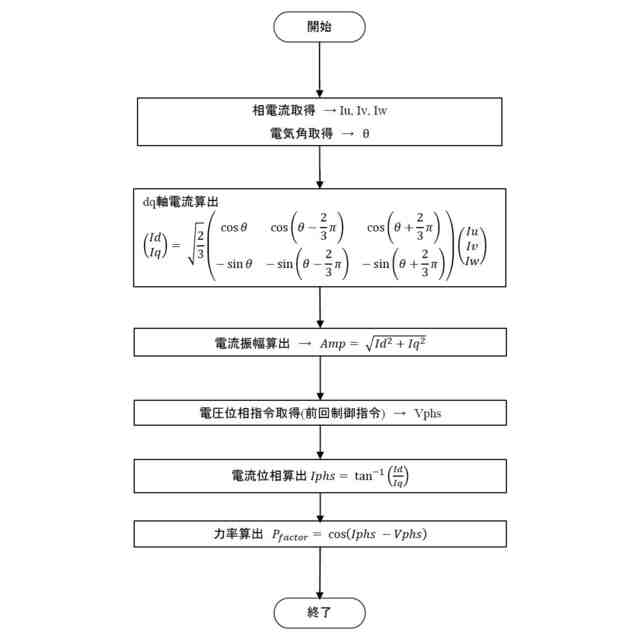
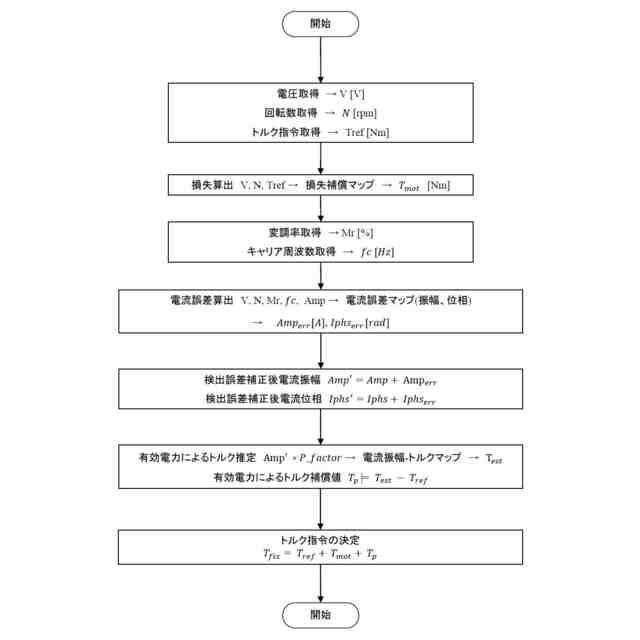
モータの各センサから取得したから力率と電流振幅を算出し、力率、電流振幅、モータ回転数、電圧から前記トルク補償値を算出し、
前記トルク補償値によってトルク指令算出値を補正する、
モータ制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、モータ制御方法に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
永久磁石同期モータの用途は拡大するいっぽうで、そのトルク制御において、所望のトルクを指令どおりに出力する技術が求められている。指令どおりのトルク出力を行うには損失の補償などを行う必要があるためである。また、磁石を使ったモータにおいては、その出力トルクは磁石磁束量に依存し、その磁石磁束量は磁石温度によって変化する。出力トルクを維持するために、例えば、特許文献1には、磁石温度を推定し、トルク指令を補正する技術が提案されている。
【先行技術文献】
【特許文献】
【0003】
特開2020-167870号公報
特開2007-159368号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
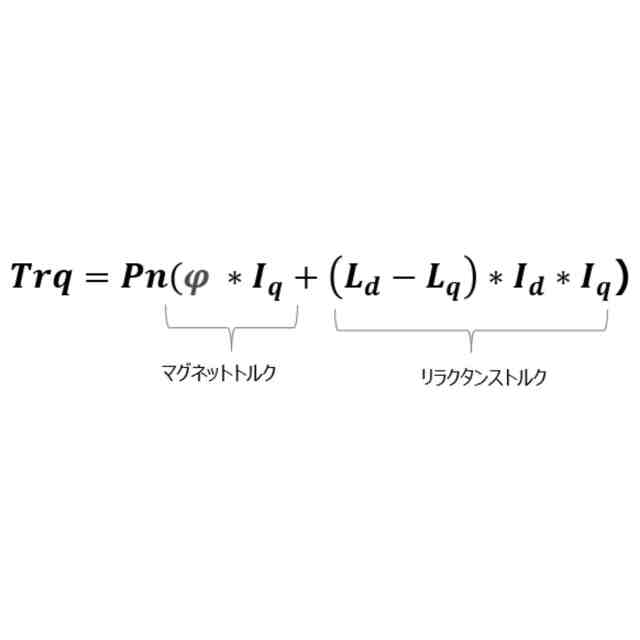
しかしながら、特許文献1に開示されている技術のように、磁石温度を推定するだけでは所望の出力トルクに制御できない。特許文献1の装置は、dq軸電流指令を用いてトルク実現を行う電流ベクトル制御であって、磁石温度を推定し、磁石温度に基づく磁石磁束を算出し、補正すべきトルク指令量を算出している。
【0005】
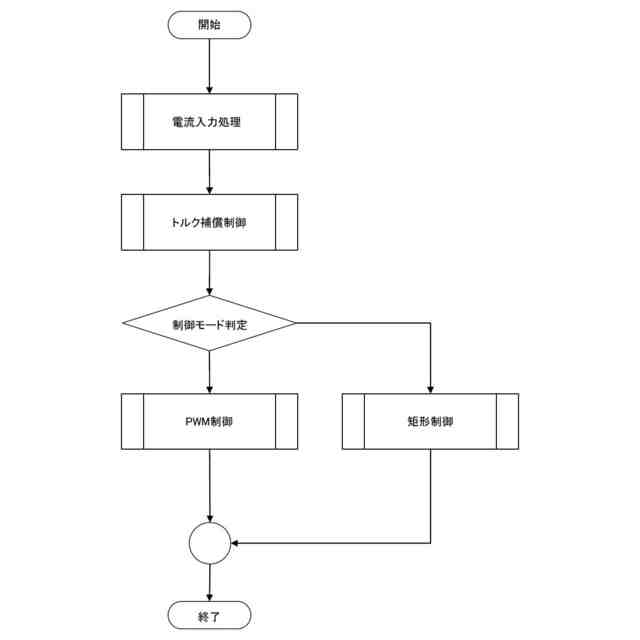
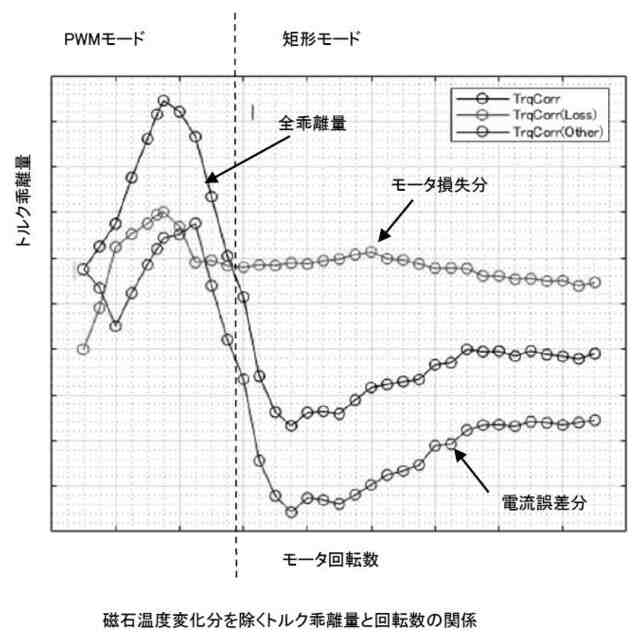
しかるに、モータの出力を使い切るために、電流ベクトル制御以外のさまざまな制御法が提案されている。例えば、特許文献2には、弱め界磁制御として、出力変調率を固定し(最大127%)、電圧位相制御を行う制御が開示されている。モータ駆動システム全体の最適化のため、電流ベクトル制御(以降、PWMモード)、電圧位相制御(以降、矩形モード)をモータの回転速度に合わせて切り替えて使うのが一般的である。
【0006】
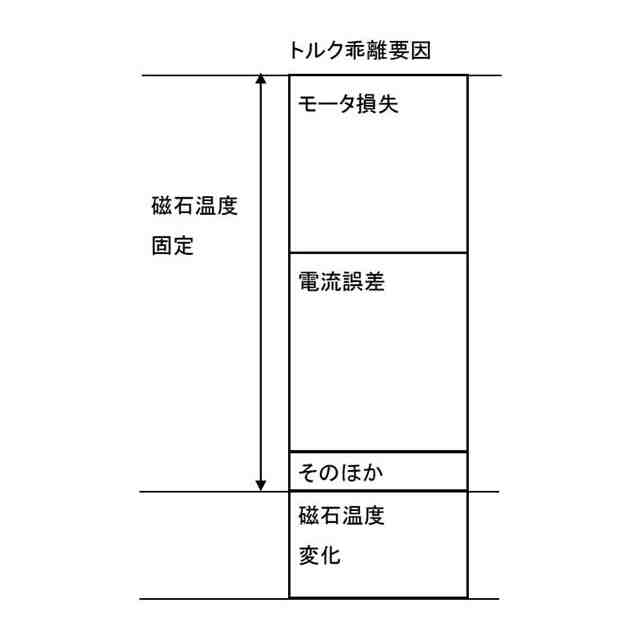
弱め界磁制御をPWMモードで行う場合、その印加電圧は(最大115%に対して)変調率100%程度に留める必要がある。フィードバック制御による振幅変調できる余地を残すためである。その場合、モータ出力は余力を残すことになる。理論的な最大変調率127%出力する矩形波による電圧位相制御を行えば、モータ出力を最大まで引き出すことができる。しかしながら、このような制御では、トルク補償において課題が発生する。電圧位相制御は等トルク指令線上を、誘起電圧に応じて動作点を変えるためである。また、磁石温度変化以外のトルク乖離要因として、センサ遅延による電流誤差があり、とくに矩形モードにおいて動作点が変わることにより単純なトルク値の加減で補償することは困難となる。
【0007】
そのため、特許文献1の磁石温度に基づくトルク変化による補正だけでは、矩形モードにおいて出力トルクを補償することができないという課題がある。さらに、いかなるフィードバック制御を行っていたとしても、トルク出力が変化する要因は、磁石磁束の変化のほかにもあり、補正する必要があるという課題もある。
【0008】
本発明は、かかる課題に鑑みてなされたものであり、磁石温度の変化によらずにトルクを調整することができ、トルク乖離しても所望のトルク出力を得ることができるモータ制御方法を提供することを目的とする。
【課題を解決するための手段】
【0009】
本発明の一態様に係るモータ制御方法は、外部から入力する指令に基づいてモータを制御するモータ制御方法であって、トルク指令値算出部と、トルク指令値を補償するトルク補償値を算出するトルク補償値算出部と、を有し、前記トルク補償値算出部は、モータの各センサから取得したから力率と電流振幅を算出し、力率、電流振幅、モータ回転数、電圧から前記トルク補償値を算出し、前記トルク補償値によってトルク指令算出値を補正する。
【発明の効果】
【0010】
本発明によれば、磁石温度の変化によらずにトルクを調整することができ、トルク乖離しても所望のトルク出力を得ることができるモータ制御方法を提供することができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
車両
8日前
トヨタ自動車株式会社
車両
8日前
トヨタ自動車株式会社
車両
8日前
トヨタ自動車株式会社
方法
4日前
トヨタ自動車株式会社
車両
1日前
トヨタ自動車株式会社
方法
1日前
トヨタ自動車株式会社
電動車
今日
トヨタ自動車株式会社
自動車
8日前
トヨタ自動車株式会社
組電池
4日前
トヨタ自動車株式会社
電動車
1日前
トヨタ自動車株式会社
充電器
9日前
トヨタ自動車株式会社
ロータ
15日前
トヨタ自動車株式会社
製造方法
9日前
トヨタ自動車株式会社
駆動装置
今日
トヨタ自動車株式会社
制御装置
8日前
トヨタ自動車株式会社
電動車両
15日前
トヨタ自動車株式会社
電動車両
9日前
トヨタ自動車株式会社
判定装置
10日前
トヨタ自動車株式会社
電動車両
2日前
トヨタ自動車株式会社
駆動装置
今日
トヨタ自動車株式会社
制御装置
10日前
トヨタ自動車株式会社
配車装置
今日
トヨタ自動車株式会社
検査装置
2日前
トヨタ自動車株式会社
表示装置
今日
トヨタ自動車株式会社
電源装置
今日
トヨタ自動車株式会社
ステータ
今日
トヨタ自動車株式会社
充電装置
今日
トヨタ自動車株式会社
触媒装置
今日
トヨタ自動車株式会社
電池パック
10日前
トヨタ自動車株式会社
電気自動車
9日前
トヨタ自動車株式会社
電池パック
10日前
トヨタ自動車株式会社
電池パック
8日前
トヨタ自動車株式会社
全固体電池
8日前
トヨタ自動車株式会社
電池パック
10日前
トヨタ自動車株式会社
電池冷却器
2日前
トヨタ自動車株式会社
シール構造
今日
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ