TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025069843
公報種別
公開特許公報(A)
公開日
2025-05-01
出願番号
2023179816
出願日
2023-10-18
発明の名称
車両用自己診断装置
出願人
トヨタ自動車株式会社
代理人
弁理士法人プロスペック特許事務所
主分類
G01P
3/42 20060101AFI20250423BHJP(測定;試験)
要約
【課題】自車両の車輪の単位時間あたりの回転数に基づいて取得された自車両の車速が不正確であることを報知可能な車両用自己診断装置を提供する。
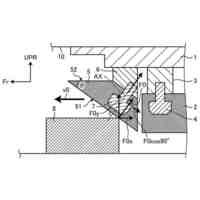
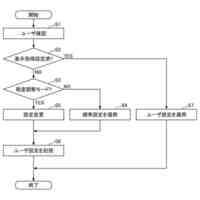
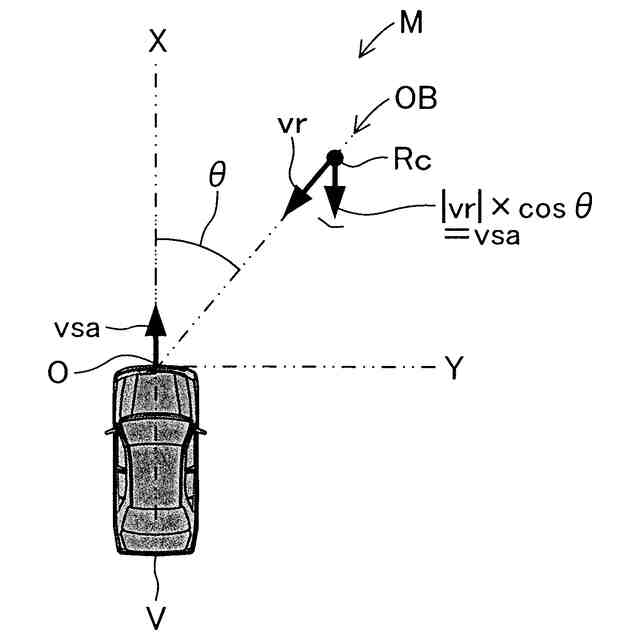
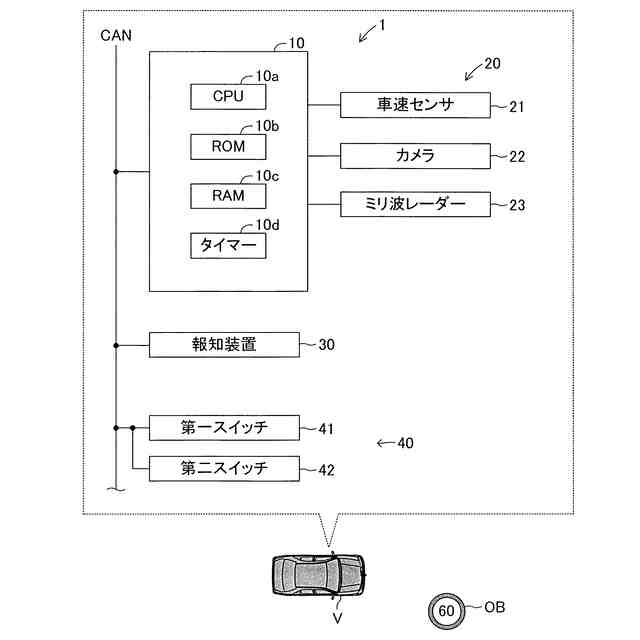
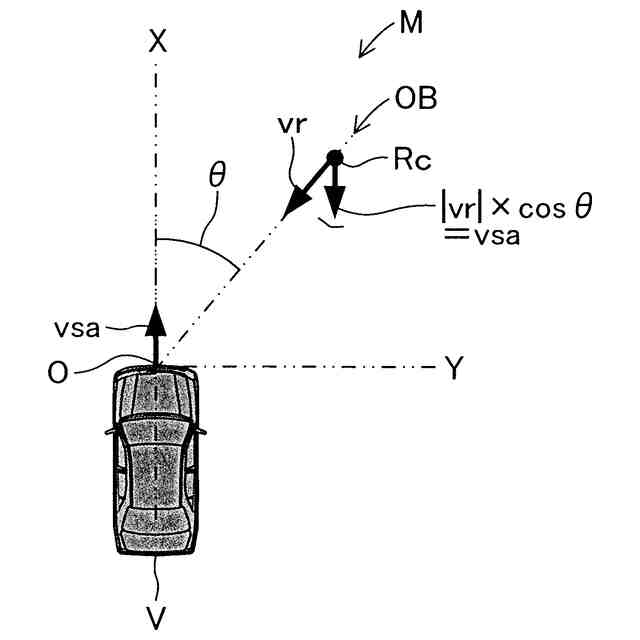
【解決手段】自車両の周辺の所定領域を撮影して得られた画像に関する情報を出力するカメラ22と、自車両に対する立体物の速度である相対速度を取得して出力するミリ波レーダー23と、自車両の車輪の単位時間あたりの回転数Nに基づいて自車両の車速を取得して出力する車速センサ21とを備え、カメラ22情報に基づいて自車両の周辺の静止物OBを特定し、ミリ波レーダー23から自車両に対する前記静止物OBのの速度である相対速度vrを取得し、自車両の進行方向に平行な方向の成分の絶対値を自車両の実車速vsaとして取得し、車速センサ21からの車速vsと実車速vsaとの差の絶対値が閾値を超えている状態の継続時間が閾値を超えた場合に、運転者に対して所定の情報が提供される。
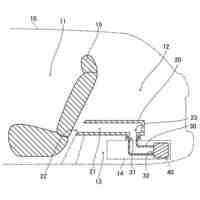
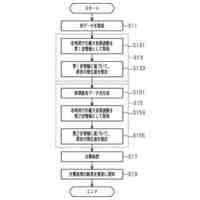
【選択図】図2
特許請求の範囲
【請求項1】
自車両の周辺の所定領域を撮影して得られた画像に関する情報を出力するカメラと、
自車両に対する立体物の速度である相対速度を取得して出力するミリ波レーダーと、
自車両の車輪の単位時間あたりの回転数に基づいて自車両の車速を取得して出力する車速センサと、
前記カメラから取得した情報に基づいて、自車両の周辺の静止物を特定し、前記ミリ波レーダーから、自車両に対する前記静止物の速度である相対速度を取得し、当該静止物の相対速度の成分であって、自車両の進行方向に対して平行な方向の成分の絶対値を自車両の実車速として取得し、さらに、前記車速センサから前記車速を取得し、当該車速と前記実車速との差の絶対値が閾値を超えている状態の継続時間が閾値を超えた場合に、運転者に対して所定の情報が提供されるように報知装置を制御するプロセッサと、
を備えた、車両用自己診断装置。
続きを表示(約 730 文字)
【請求項2】
請求項1に記載の車両用自己診断装置において、
前記プロセッサは、前記車速センサから取得した車速と前記実車速との差の絶対値が閾値を超えている状態の継続時間が閾値を超えた場合に、前記実車速と前記車速センサから取得した車速との比に基づいて前記車速センサから出力された車速を補正する補正処理を実行する、車両用自己診断装置。
【請求項3】
請求項2に記載の車両用自己診断装置において、
前記プロセッサは、前記車速センサから取得した車速と前記実車速との差の絶対値が閾値を超えている状態の継続時間が閾値を超え、且つ自車両の運転者が前記車速を補正することを要求する操作を実行した場合に、前記補正処理を実行する、車両用自己診断装置。
【請求項4】
請求項2に記載の車両用自己診断装置において、
前記プロセッサは、前記車速センサから取得した車速と前記実車速との差の絶対値が閾値を超えている状態の継続時間が閾値を超え、且つ自車両の運転者が前記車速を補正することを要求する操作を実行しなかった場合に、前記補正処理を実行することなく、自車両の車輪に関する情報が運転者に提供されるように前記報知装置を制御する、車両用自己診断装置。
【請求項5】
請求項2に記載の車両用自己診断装置において、
前記プロセッサは、前記車速センサから取得した車速と前記実車速との差の絶対値が閾値を超えている状態の継続時間が閾値を超え、且つ自車両の運転者が前記車速を補正することを要求する操作を実行しなかった場合に、前記補正処理を実行することなく、自車両が備える運転支援機能を一時的に無効化する、車両用自己診断装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、自車両の車輪の単位時間当たりの回転数に基づいて取得された自車両の車速(絶対値)が不正確であることを報知可能な車両用自己診断装置に関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
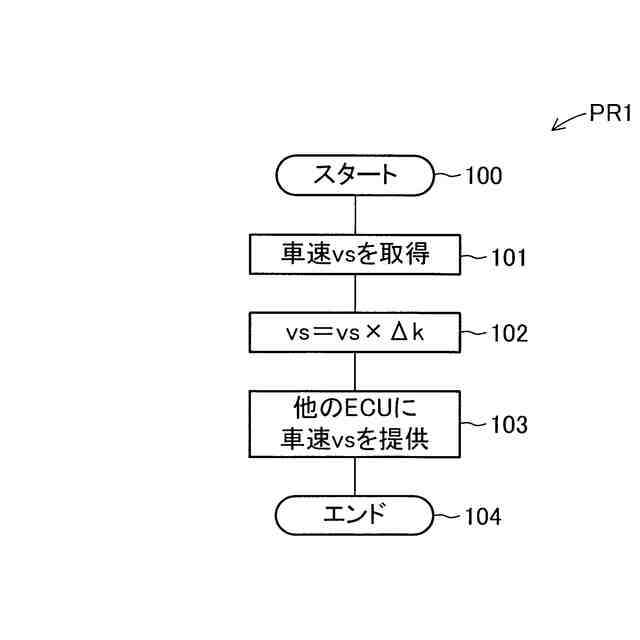
自車両の車速を検知する車速センサは周知である(例えば、下記特許文献1を参照。)。この種の車速センサは、単位時間あたりの車輪の回転数Nを取得し、その回転数Nに車輪の動的負荷半径(係数k)を乗算することにより、自車両の車速vsを取得して出力する。この係数kは、車両の工場出荷時(車両の設計時)に決定され、車速センサの記憶装置(ROM)に記憶されている。すなわち、係数kは固定値(書き換え不能)である。なお、従来の車両において、車速センサから出力された値(車速vs)が、車両のインストゥルメントパネルに設けられた表示器(車速計)に表示される場合がある。また、車速センサから出力された値(車速vs)に基づいて、自車両の制御(運転支援、自動運転)が実行される場合がある。
【先行技術文献】
【特許文献】
【0003】
特開2009-236570号公報
【発明の概要】
【0004】
ところで、車輪の動的負荷半径は、タイヤ空気圧に応じて変化(拡大又は縮小)する。また、ユーザーが、自車両の車輪を交換した場合に、動的負荷半径が変化する場合がある。例えば、交換後の車輪のホイールの外径が、自車両の工場出荷時のホイールの外径よりも大きい場合(インチアップされた場合)、動的負荷半径が拡大する可能性が高い。しかしながら、上記のように、車速センサの係数kは固定値である。そのため、車輪の動的負荷半径の変化に起因して、車速センサから出力された車速vsと実車速vsaとの差(誤差)が比較的大きくなる場合がある。
【0005】
本発明の目的の一つは、自車両の車輪の単位時間当たりの回転数に基づいて取得された自車両の車速が不正確であることを報知可能な車両用自己診断装置を提供することにある。
【0006】
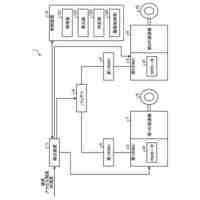
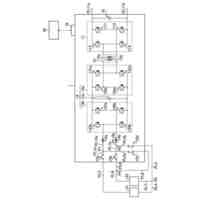
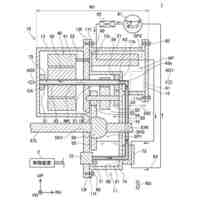
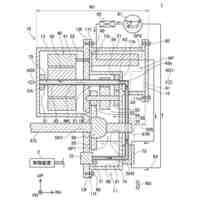
上記課題を解決するために、本発明の車両用自己診断装置(1)は、
自車両の周辺の所定領域を撮影して得られた画像に関する情報を出力するカメラ(22と、
自車両に対する立体物の速度である相対速度を取得して出力するミリ波レーダー(23)と、
自車両の車輪の単位時間あたりの回転数(N)に基づいて自車両の車速(vs)を取得して出力する車速センサ(21)と、
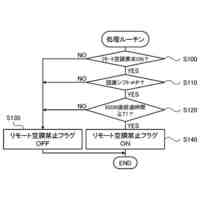
前記カメラから取得した情報に基づいて、自車両の周辺の静止物(OB)を特定し、前記ミリ波レーダーから、自車両に対する前記静止物の速度である相対速度(vr)を取得し、当該静止物の相対速度の成分であって、自車両の進行方向に対して平行な方向の成分の絶対値を自車両の実車速(vsa)として取得し、さらに、前記車速センサから前記車速を取得し、当該車速と前記実車速との差の絶対値(Δvs)が閾値(Δvsth)を超えている状態の継続時間(Δt)が閾値(Δtth)を超えた場合に、運転者に対して所定の情報が提供されるように報知装置(30)を制御するプロセッサ(10)と、
を備える。
【0007】
なお、本明細書において、「速度」は、物体が進行する向き及びその速さ(絶対値)を含む概念(ベクトル)である。一方、「車速」及び「実車速」は、車両の速さ(絶対値)を意味し、車両が進行する向きを含んでいない概念(スカラー)である。
【0008】
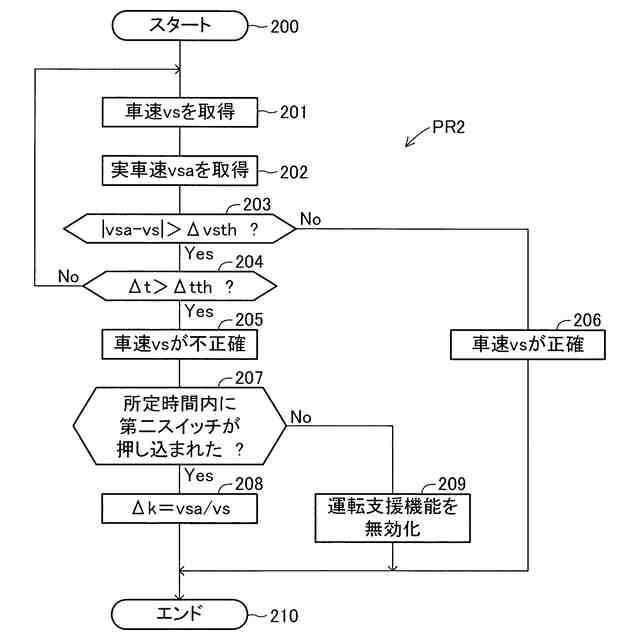
地面に固定されている立体物(静止物)と自車両との相対速度(ベクトル)の成分であって、自車両の進行方向に平行な成分の絶対値(速さ)は、自車両の実車速(絶対値)に一致する。本発明に係る車両用自己診断装置のプロセッサは、カメラから取得した情報に基づいて静止物を特定し、ミリ波レーダーから取得した情報に基づいて、自車両から見た当該静止物の速度である相対速度(ベクトル)の成分であって、自車両の進行方向に対して平行成分の絶対値を自車両の実車速として取得する。これにより、プロセッサは、車速センサとは別の手段を用いて、自車両の実車速を高精度に取得することができる。車速センサから取得した車速と実車速との差の絶対値が閾値を超えている状態の継続時間が閾値を超えた場合、車輪の動的負荷半径の現在値と設計値に対して過大又は過小である可能性が高い。そこで、この場合、プロセッサは、車速センサから出力される車速が不正確であると判定し、運転者に対し、所定の情報(車速センサの出力が不正確であることを示す情報)を提供する。上記のように、本発明に係る車両用自己診断装置は、車速センサから出力された自車両の車速が不正確(信頼度が低い)であることを検知することができる。
【0009】
本発明の一態様に係る車両用自己診断装置において、
前記プロセッサは、前記車速センサから取得した車速と前記実車速との差の絶対値が閾値を超えている状態の継続時間が閾値を超えた場合に、前記実車速と前記車速センサから取得した車速との比に基づいて前記車速センサから出力された車速を補正する補正処理を実行する。
【0010】
これによれば、自車両が備える他のECU(例えば、運転支援を実行するECU、インストゥルメントパネルに設けられた表示装置に車速を表示させるECUなど)は、補正後の車速(正確な値)に基づいて各種処理を実行できる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
方法
4日前
トヨタ自動車株式会社
車両
8日前
トヨタ自動車株式会社
車両
8日前
トヨタ自動車株式会社
方法
1日前
トヨタ自動車株式会社
車両
1日前
トヨタ自動車株式会社
車両
8日前
トヨタ自動車株式会社
自動車
8日前
トヨタ自動車株式会社
電動車
1日前
トヨタ自動車株式会社
組電池
4日前
トヨタ自動車株式会社
充電器
9日前
トヨタ自動車株式会社
電動車
今日
トヨタ自動車株式会社
製造方法
9日前
トヨタ自動車株式会社
触媒装置
今日
トヨタ自動車株式会社
電動車両
9日前
トヨタ自動車株式会社
電動車両
2日前
トヨタ自動車株式会社
検査装置
2日前
トヨタ自動車株式会社
電動車両
15日前
トヨタ自動車株式会社
表示装置
今日
トヨタ自動車株式会社
駆動装置
今日
トヨタ自動車株式会社
駆動装置
今日
トヨタ自動車株式会社
判定装置
10日前
トヨタ自動車株式会社
充電装置
今日
トヨタ自動車株式会社
制御装置
8日前
トヨタ自動車株式会社
配車装置
今日
トヨタ自動車株式会社
制御装置
10日前
トヨタ自動車株式会社
ステータ
今日
トヨタ自動車株式会社
電源装置
今日
トヨタ自動車株式会社
電池冷却器
2日前
トヨタ自動車株式会社
電池パック
8日前
トヨタ自動車株式会社
電池パック
10日前
トヨタ自動車株式会社
電池パック
10日前
トヨタ自動車株式会社
全固体電池
8日前
トヨタ自動車株式会社
電池パック
10日前
トヨタ自動車株式会社
電気自動車
9日前
トヨタ自動車株式会社
シール構造
今日
トヨタ自動車株式会社
音源推定方法
今日
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ