TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025069056
公報種別
公開特許公報(A)
公開日
2025-04-30
出願番号
2024161034
出願日
2024-09-18
発明の名称
自エージェントを支援するための方法、プログラム、記憶媒体および支援システム、ならびに車両
出願人
本田技研工業株式会社
代理人
弁理士法人クシブチ国際特許事務所
主分類
G08G
1/16 20060101AFI20250422BHJP(信号)
要約
【課題】自エージェントを支援するためのコンピュータ実装方法を提供すること。
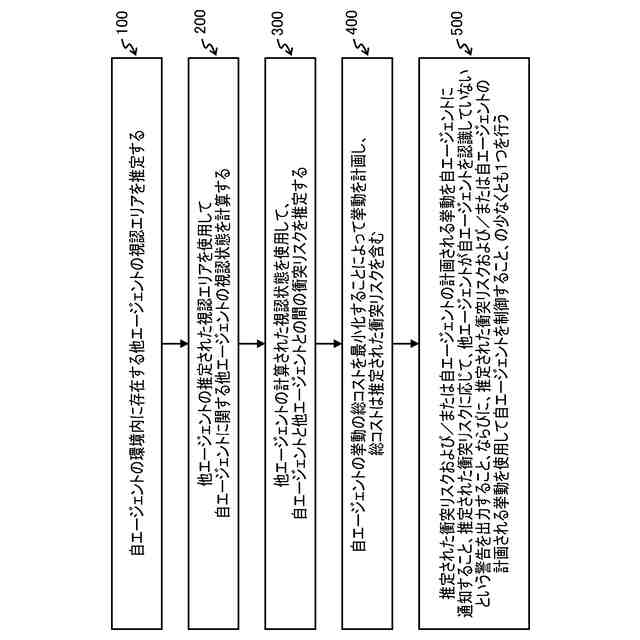
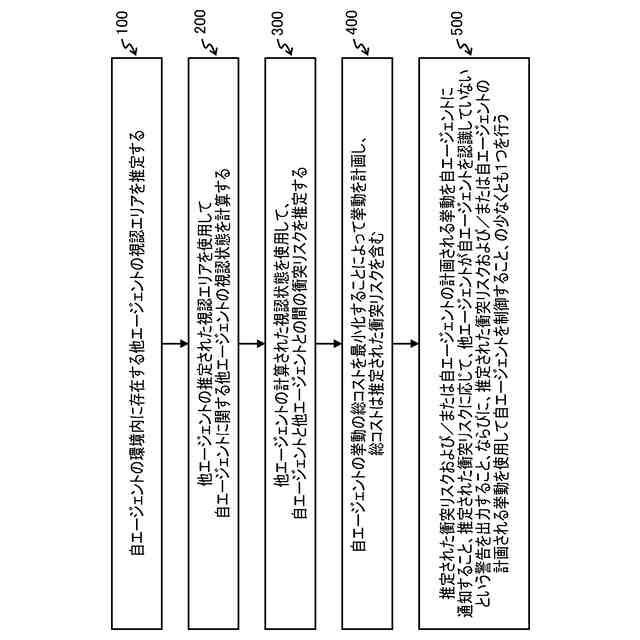
【解決手段】方法は、自エージェントの環境内に存在する他エージェントの視認エリアを推定することと、他エージェントの推定された視認エリアを使用して、自エージェントに関する他エージェントの視認状態を計算することと、自エージェントと他エージェントとの間の衝突リスクを推定することと、自エージェントの挙動の総コストを最小化することによって挙動を計画することであって、総コストは推定された衝突リスクを含む、挙動を計画することと、推定された衝突リスクおよび/または自エージェントの計画される挙動を自エージェントに通知すること、他エージェントが自エージェントを認識していないという警告を出力すること、推定された衝突リスクおよび/または自エージェントの計画される挙動を使用して自エージェントを制御すること、の少なくとも1つを行うことと、を含む。
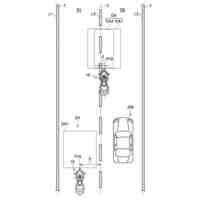
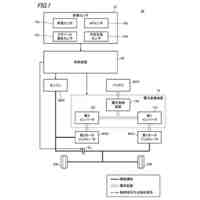
【選択図】図1
特許請求の範囲
【請求項1】
自エージェントを支援するためのコンピュータ実装方法であって、
前記自エージェントの環境内に存在する他エージェントの視認エリアを推定することと、
前記他エージェントの前記推定された視認エリアを使用して、前記自エージェントに関する前記他エージェントの視認状態を計算することと、
前記他エージェントの前記計算された視認状態を使用して、前記自エージェントと前記他エージェントとの間の衝突リスクを推定することと、
前記自エージェントの挙動の総コストを最小化することによって前記挙動を計画することであって、前記総コストが前記推定された衝突リスクを含む、挙動を計画することと、
前記推定された衝突リスクおよび/または前記自エージェントの前記計画される挙動を前記自エージェントに通知すること、
前記推定された衝突リスクに応じて、前記他エージェントが前記自エージェントを認識していないという警告を出力すること、ならびに、
前記推定された衝突リスクおよび/または前記自エージェントの前記計画される挙動を使用して前記自エージェントを制御すること
の少なくとも1つを行うことと、を含む方法。
続きを表示(約 2,000 文字)
【請求項2】
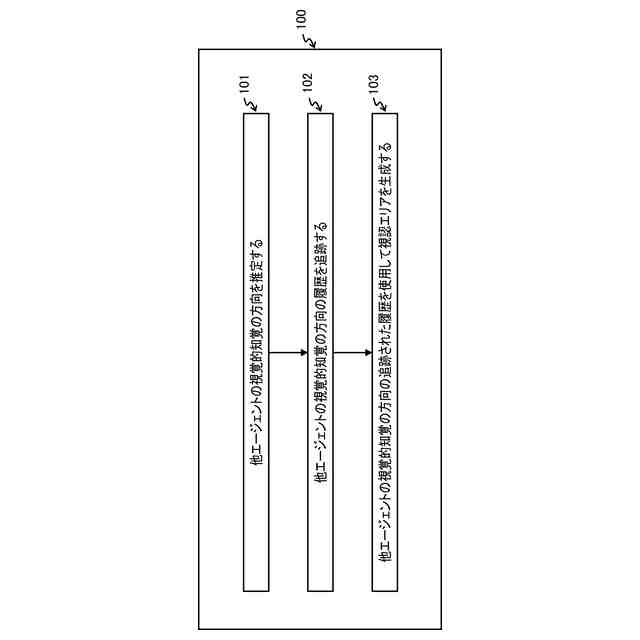
前記他エージェントの前記視認エリアを推定することが、
前記他エージェントの視覚的知覚の方向を推定することと、
前記他エージェントの前記視覚的知覚の方向の履歴を追跡することと、
前記他エージェントの前記視覚的知覚の方向の前記追跡された履歴を使用して、前記視認エリアを生成することと、を含む、請求項1に記載の方法。
【請求項3】
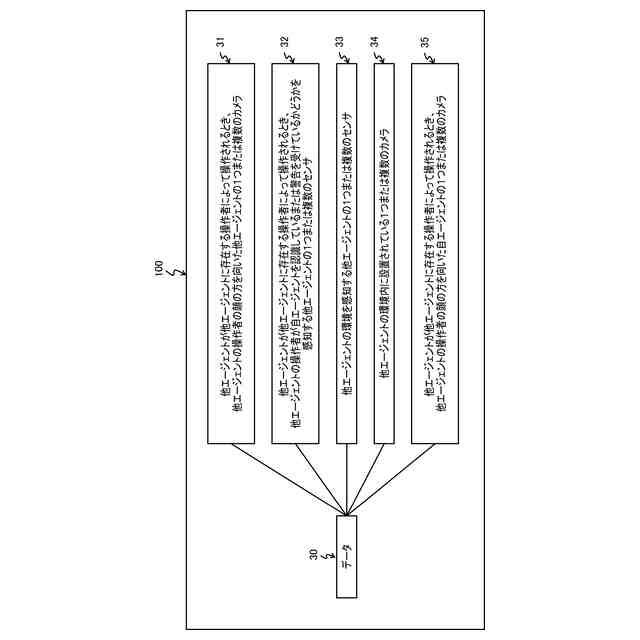
前記他エージェントの前記視認エリアを推定することが、
前記他エージェントが前記他エージェントに存在する操作者によって操作されるとき、前記他エージェントの前記操作者の顔の方を向いた前記他エージェントの1つまたは複数のカメラ、
前記他エージェントが前記他エージェントに存在する操作者によって操作されるとき、前記他エージェントの前記操作者が前記自エージェントを認識しているまたは警告を受けているかどうかを感知する前記他エージェントの1つまたは複数のセンサ、
前記他エージェントの環境を感知する前記他エージェントの1つまたは複数のセンサ、
前記他エージェントの環境内に設置された1つまたは複数のカメラ、および
前記他エージェントが前記他エージェントに存在する操作者によって操作されるとき、前記他エージェントの前記操作者の顔の方を向いた前記自エージェントの1つまたは複数のカメラ
のうちの少なくとも1つのデータを使用することを含む、請求項1に記載の方法。
【請求項4】
前記他エージェントの前記視認エリアを推定することが、
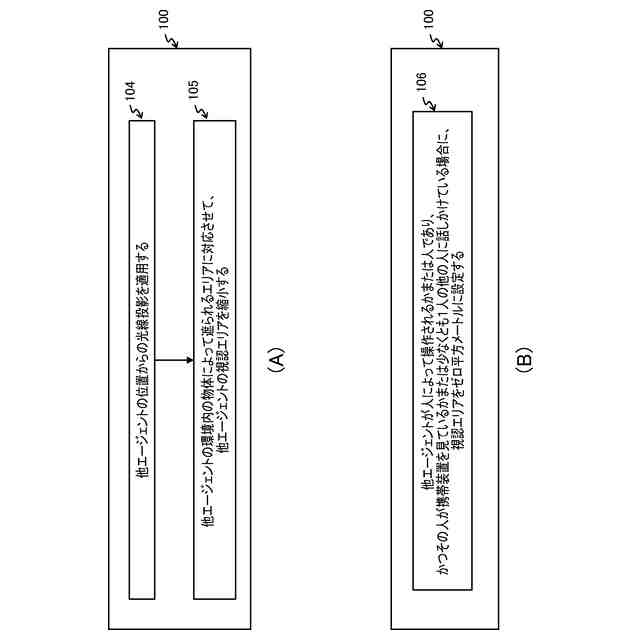
前記他エージェントの位置からの光線投影を適用することと、
前記他エージェントの環境内の物体によって遮られるエリアに対応させて、前記他エージェントの前記視認エリアを縮小することと、を含む、請求項1に記載の方法。
【請求項5】
前記他エージェントの前記視認エリアを推定することが、
前記他エージェントが人によって操作されるかまたは人であり、かつその人が携帯装置を見ているかまたは少なくとも1人の他の人に話しかけている場合に、前記視認エリアをゼロ平方メートルに設定すること、を含む、請求項1に記載の方法。
【請求項6】
前記方法が、
前記自エージェントの視認エリアを推定することと、
前記自エージェントの前記推定された視認エリアを使用して、前記他エージェントに関する前記自エージェントの視認状態を計算することと、
前記他エージェントの前記計算された視認状態および前記自エージェントの前記計算された視認状態を使用して、前記自エージェントと前記他エージェントとの間の前記衝突リスクを推定することと、を含む、請求項1に記載の方法。
【請求項7】
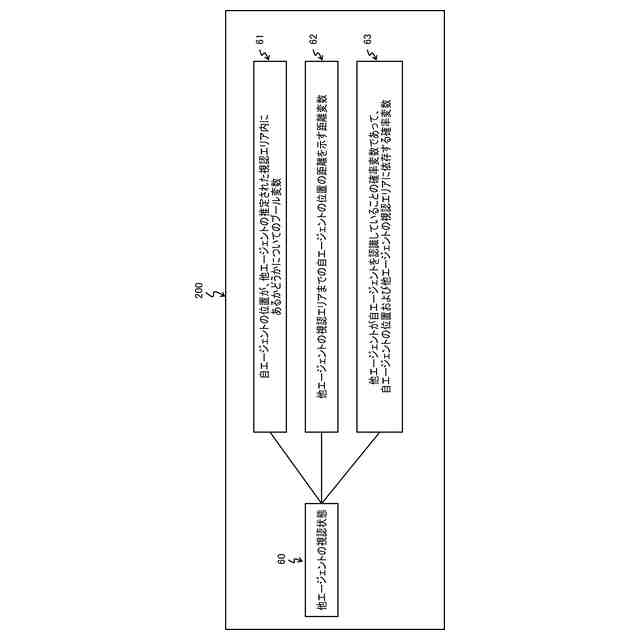
前記他エージェントの前記視認状態が、
前記自エージェントの位置が前記他エージェントの前記推定された視認エリア内にあるかどうかについてのブール変数、
前記他エージェントの前記視認エリアまでの前記自エージェントの位置の距離を示す距離変数、および
前記他エージェントが前記自エージェントを認識していることの確率変数であって、前記自エージェントの前記位置および前記他エージェントの前記視認エリアに依存する確率変数、
の少なくとも1つを含んでよい、請求項1に記載の方法。
【請求項8】
前記他エージェントの前記推定された視認エリアを使用して、前記自エージェントに関する前記他エージェントの視認状態を計算することが、
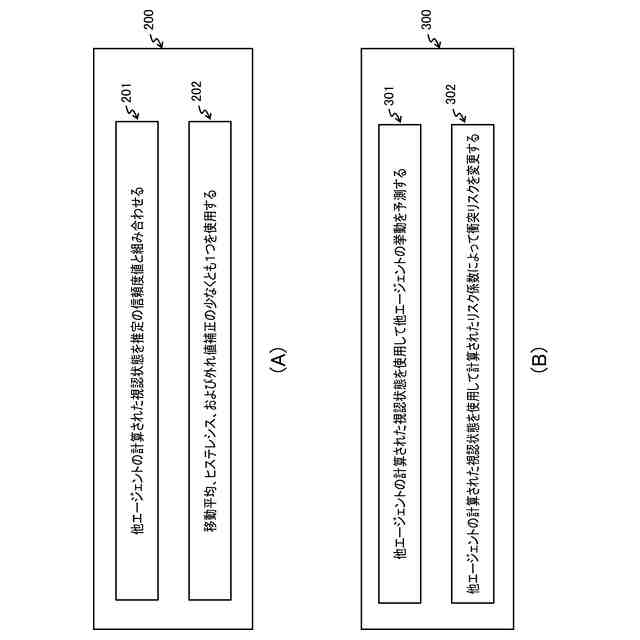
前記他エージェントの前記計算された視認状態を前記推定の信頼度値と組み合わせること、ならびに
移動平均、ヒステレシス、および外れ値補正の少なくとも1つを使用すること、
の少なくとも1つを含む、請求項1に記載の方法。
【請求項9】
前記他エージェントの前記計算された視認状態を使用して、前記自エージェントと前記他エージェントとの間の衝突リスクを推定することが、
前記他エージェントの前記計算された視認状態を使用して前記他エージェントの挙動を予測すること、および、
前記他エージェントの前記計算された視認状態を使用して計算されたリスク係数によって前記衝突リスクを変更すること、
の少なくとも1つを含む、請求項1に記載の方法。
【請求項10】
前記方法が、
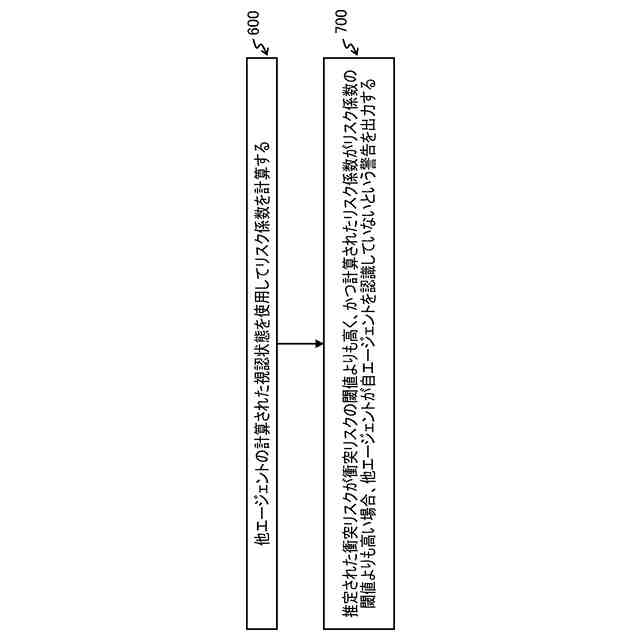
前記他エージェントの前記計算された視認状態を使用してリスク係数を計算することと、
前記推定された衝突リスクが前記衝突リスクの閾値よりも高く、かつ前記計算されたリスク係数が前記リスク係数の閾値よりも高い場合、前記他エージェントが前記自エージェントを認識していないという警告を出力することと、を含む、請求項1に記載の方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、自エージェントを支援する分野に関する。詳細には、自エージェントを支援するための方法、プログラムコードを備えた対応するプログラム、対応する非一時的コンピュータ可読記憶媒体、自エージェントを支援するための支援システム、およびそのような支援システムを備えた車両が提案される。
続きを表示(約 2,700 文字)
【背景技術】
【0002】
文献、米国特許第9,463,797(B2)号は、リスクに基づく交通シーン分析のための方法および高度な運転者支援システムを有する車両を開示する。文献、米国特許第10,627,812(B2)号は、視認性が制限された交差点に接近するためのリスクに基づく運転者支援を開示している。米国特許出願公開第2020/0231149(A1)号は、運転者を支援する方法、運転者支援システム、およびそのような運転者支援システムを備えた車両を開示する。文献、米国特許出願公開第18/190,932号は、知覚された状況を複数のあり得る状況から判定することに基づく運転者支援システムおよびその運転者支援システムを備えた車両を開示する。文献、米国特許出願公開第17/709,420号は、車両の運転者を支援するための高度な運転者支援システムを開示する。
【0003】
特に、文献、米国特許出願公開第17/709,420は、個人のリスク空間を視覚化するためのシステムを開示する。文献、米国特許出願公開第17/709,420号は、車両の運転者を支援するための高度な運転者支援システムを開示する。同システムは、センサユニット、処理ユニット、および表示ユニットを備えている。センサユニットは、車両の環境を感知し、感知出力を処理ユニットに提供するように構成されている。処理ユニットは、その感知出力に基づいて、環境の特徴を少なくとも1つ判定するように構成されている。処理ユニットは、現在時刻における車両の少なくとも1つのパラメータに基づいて、車両の2つ以上の仮想位置の各仮想位置で、その特徴に関するそれぞれのリスクを推定して、2つ以上の仮想位置について2つ以上のリスクを推定すること、および、この2つ以上のリスクに基づいてリスクゾーンを形成することにより、現在時刻についてその特徴のリスクゾーンを判定するように構成される。表示ユニットは、その特徴およびその特徴のリスクゾーンと共に車両の環境を表示するように構成される。
【0004】
言い換えると、文献、米国特許出願公開第17/709,420号は、現在時刻に車両が車両の実際の位置にあるのではなく、仮想の位置にあると仮定して、現在時刻について、現在時刻の車両の少なくとも1つのパラメータに基づき、車両の環境内の検出された特徴に関する理論的リスクを推定するように構成された処理ユニットを開示している。仮想位置は、実際の位置とは異なる車両の仮定位置に対応し、したがって理論的な位置である。詳細には、2つ以上の仮想位置は、互いと異なり、かつ現在時刻の車両の実際の位置と異なる位置からなるかまたはそれらの位置に対応する。
【0005】
リスクゾーンは、車両が現在時刻にあるべきでない危険なエリアを表してよい。特徴のリスクゾーンは、その特徴の個人(すなわち、身体近傍(peripersonal))空間を表してよい。これにより、運転者は、表示された車両の環境、表示された特徴、および表示された特徴のリスクゾーンに基づいて、現在時刻の車両のリスク状況を表示ユニットから直感的に認識することができ、これは、人は誰でも、侵害されたくない自身の個人空間を持っているからである。したがって、特徴の個人空間をリスクゾーンの形で運転者に示すことにより、運転者は、単に、特徴に関する2つ以上の推定リスクに関する情報を特徴のリスクゾーンの表示から受け取るだけでない。運転者は同時に、特徴の個人空間を認識し、その者はその者の心理から直感的にこの個人空間に注意を払うことになる。すなわち、特徴のリスクゾーンは、運転者に、車両が侵入すべきでないエリアを知らせる。
【0006】
文献、米国特許出願公開第17/709,420号の個人のリスク空間を視覚化するシステムは、リスクをどのように視覚化できるかの一例である。本開示、特に視認状態の共有に関する本開示は、文献、米国特許出願公開第17/709,420号の全体的な枠組みに取り入れられてよい。すると、米国特許出願公開第17/709,420号は、車両周辺のリスクゾーンに加えて、本開示の主題である、他の運転者の視認性を視覚化することが可能となる。
【0007】
モビリティの文脈では、環境に関与する種々のエージェントが存在する。例えば、道路に関して、道路のエリア内を移動している1台または複数の車などの種々の陸上車両、1台または複数の自転車、および1人または複数の人(例えば、歩行者)があり得る。用語「道」は、「道路」の同義語として使用されることがある。そのようなエージェントの任意のものを支援するための支援システムは、他エージェントとの衝突のリスクから、各支援対象エージェントに警告するのを助け得る。これに関して、支援されるエージェントは、「自エージェント」と呼ばれることがある。例えば、道路上で運転者によって運転される車の死角システムが、車の死角の1つに存在する道路上の他エージェント(例えば、歩行者、自転車、または別の車)を運転者に警告することができる。車の死角とは、その車を運転している運転者の視認性がゼロである車のエリアである。すなわち、車の死角に存在する物体はいずれも、運転者によって視覚的に知覚される(例えば、直接、またはサイドミラーもしくはバックミラーを介して)ことができない。車の死角は、車の死角エリアを表し得る。
【0008】
しかし、そのような死角システムは、車の環境内に運転者によって視覚的に知覚できないエージェントが存在することを、車の運転者に通知するに過ぎない。すなわち、死角に存在する1つまたは複数のエージェントは、自身が車の死角に存在していることを知ることができず、したがって自身が車の運転者に見えていないことを認識しない可能性がある。
【0009】
人間の運転者が重大な交通関係者を見落とし、人間の運転者間の伝達がないことまたは伝達が誤っていることから、多くの事故が発生する可能性がある。
【発明の概要】
【発明が解決しようとする課題】
【0010】
したがって、本開示の目的は、自エージェントを支援するための改良されたコンピュータ実装方法を提供することである。特に、環境内の自エージェントと他エージェントの間の対話を向上させることが可能な、自エージェントを支援するための改良されたコンピュータ実装方法を提供することが目的であり得る。
【課題を解決するための手段】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
本田技研工業株式会社
ドア
2日前
本田技研工業株式会社
車両
24日前
本田技研工業株式会社
車両
24日前
本田技研工業株式会社
車両
10日前
本田技研工業株式会社
車両
24日前
本田技研工業株式会社
車両
24日前
本田技研工業株式会社
車両
24日前
本田技研工業株式会社
車両
17日前
本田技研工業株式会社
移動体
11日前
本田技研工業株式会社
力センサ
27日前
本田技研工業株式会社
回転電機
20日前
本田技研工業株式会社
回転電機
24日前
本田技研工業株式会社
制御装置
26日前
本田技研工業株式会社
吸着装置
17日前
本田技研工業株式会社
排気装置
24日前
本田技研工業株式会社
触媒構造
24日前
本田技研工業株式会社
排気装置
24日前
本田技研工業株式会社
加工装置
2日前
本田技研工業株式会社
電動車両
24日前
本田技研工業株式会社
鞍乗型車両
24日前
本田技研工業株式会社
鞍乗型車両
26日前
本田技研工業株式会社
全固体電池
2日前
本田技研工業株式会社
車両用灯体
11日前
本田技研工業株式会社
車両制御装置
24日前
本田技研工業株式会社
フレーム構造
24日前
本田技研工業株式会社
鞍乗り型車両
24日前
本田技研工業株式会社
放射冷却装置
10日前
本田技研工業株式会社
鞍乗り型車両
24日前
本田技研工業株式会社
車両制御装置
25日前
本田技研工業株式会社
車体後部構造
26日前
本田技研工業株式会社
鞍乗り型車両
26日前
本田技研工業株式会社
鞍乗り型車両
26日前
本田技研工業株式会社
温度検出装置
27日前
本田技研工業株式会社
鞍乗り型車両
24日前
本田技研工業株式会社
車体前部構造
2日前
本田技研工業株式会社
車体前部構造
2日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ