TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025059338
公報種別
公開特許公報(A)
公開日
2025-04-10
出願番号
2023169378
出願日
2023-09-29
発明の名称
車両制御装置
出願人
本田技研工業株式会社
代理人
個人
,
個人
主分類
B60W
30/188 20120101AFI20250403BHJP(車両一般)
要約
【課題】合流地点付近を走行するときの車速を適切に制御する。
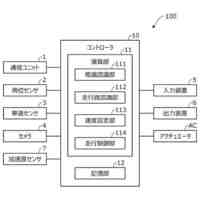
【解決手段】車両制御装置100は、自車両の走行路に対応付けて進行方向前方に設置された道路標識を認識する標識認識部111と、進行方向前方の走行路の曲率に基づいてカーブ路を認識する走行路認識部112と、自車両の目標走行速度を設定する速度設定部113と、設定された目標走行速度で自車両が走行するようにアクチュエータACを制御する走行制御部114と、を備える。速度設定部113は、本線へ合流する合流車線を自車両が走行しているときに走行路認識部112によりカーブ路が認識され、該カーブ路で標識認識部111により道路標識が認識されると、目標走行速度を第1目標走行速度に設定し、自車両が本線に進入するとき、目標走行速度を第1目標走行速度とは異なる第2目標走行速度に設定する。
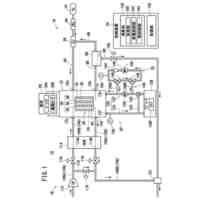
【選択図】図1
特許請求の範囲
【請求項1】
自車両の走行路に対応付けて進行方向前方に設置された道路標識を認識する標識認識部と、
前記進行方向前方の前記走行路の曲率を認識する走行路認識部と、
前記走行路における前記自車両の目標走行速度を設定する速度設定部と、
走行用アクチュエータと、
前記速度設定部により設定された前記目標走行速度で前記自車両が走行するように前記走行用アクチュエータを制御する走行制御部と、を備え、
前記走行路認識部は、さらに、認識した前記走行路の前記曲率に基づいてカーブ路を認識し、
前記速度設定部は、本線へ合流する合流車線を前記自車両が走行しているときに前記走行路認識部により前記カーブ路が認識され、該カーブ路で前記標識認識部により前記道路標識が認識されると、前記目標走行速度を前記道路標識に基づく第1目標走行速度に設定し、前記自車両が前記本線に進入するとき、前記目標走行速度を前記第1目標走行速度とは異なる第2目標走行速度に設定することを特徴とする車両制御装置。
続きを表示(約 1,300 文字)
【請求項2】
請求項1記載の車両制御装置において、
前記速度設定部は、前記走行路認識部により前記カーブ路が認識された後、前記曲率が前記所定値未満である状態が所定時間または所定距離継続すると、前記自車両が前記本線に進入すると判断して、前記目標走行速度を前記第1目標走行速度から前記第2目標走行速度へ変更することを特徴とする車両制御装置。
【請求項3】
請求項1記載の車両制御装置において、
前記走行路認識部はさらに、前記走行路上に設置された料金所を認識し、
前記速度設定部は、前記合流車線を前記自車両が走行しているときに前記標識認識部により前記道路標識が認識されると、前記目標走行速度を前記第1目標走行速度に設定するとともに、前記走行路認識部により前記料金所が認識されたか否かを判定し、前記走行路認識部により前記料金所が認識されているとき、前記料金所を前記自車両が通過すると、前記目標走行速度を前記第1目標走行速度から前記第2目標走行速度へ変更することを特徴とする車両制御装置。
【請求項4】
請求項1記載の車両制御装置において、
前記走行路認識部はさらに、前記走行路の勾配を認識し、
前記速度設定部は、前記合流車線を前記自車両が走行しているときに前記標識認識部により前記道路標識が認識されると、前記目標走行速度を前記第1目標走行速度に設定するとともに、前記走行路認識部により認識された前記走行路の勾配が所定閾値以上であるか否かを判定し、該勾配が前記所定閾値以上であると判定されると、前記本線へ前記自車両が進入するとき、前記目標走行速度を前記第1目標走行速度から前記第2目標走行速度へ変更することを特徴とする車両制御装置。
【請求項5】
請求項1記載の車両制御装置において、
ユーザからの指令を入力する入力装置と、
前記第2目標走行速度の指令値の入力を要求する要求情報を出力する出力装置と、をさらに備え、
前記速度設定部は、
前記合流車線を前記自車両が走行しているときに、前記走行路認識部により認識された前記走行路の前記曲率が前記所定値未満である状態が所定時間または所定距離継続し、かつ、前記標識認識部により新たな道路標識が認識されないとき、前記出力装置を介して前記要求情報を出力し、
前記要求情報の出力に応答して前記入力装置に前記第2目標走行速度の前記指令値が入力されると、前記目標走行速度を前記第1目標走行速度から前記指令値に基づく前記第2目標走行速度へ変更することを特徴とする車両制御装置。
【請求項6】
請求項1記載の車両制御装置において、
地図情報を記憶する記憶部をさらに備え、
前記速度設定部は、前記合流車線を前記自車両が走行しているときに、前記走行路の前記曲率が前記所定値未満である状態が所定時間または所定距離継続し、かつ、前記標識認識部により新たな道路標識が認識されないとき、前記目標走行速度を前記第1目標走行速度から、前記記憶部に記憶された前記地図情報に基づき取得した前記第2目標走行速度に変更することを特徴とする車両制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、合流車線が本線へ合流する地点における自車両の走行を制御する車両制御装置に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
この種の装置として、従来、道路標識や路面標識に表示されている制限速度に基づいて、車速を制御するようにした装置が知られている(例えば特許文献1参照)。特許文献1記載の装置では、自車両前方の撮像画像に基づき道路標識や路面標識に表示されている制限速度を認識し、認識した制限速度に基づいて車速を制御する。
【先行技術文献】
【特許文献】
【0003】
特開2005-128790号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、高速道路の本線に合流する合流地点付近に道路標識が設置されている場合、その道路標識が本線に対応するものであるか否かを撮像画像に基づき判断するのは困難である。したがって、特許文献1記載の装置のように、単に撮像画像に基づき道路標識の情報を認識するだけでは、合流地点付近において車速が適切に制御されないおそれがある。
【課題を解決するための手段】
【0005】
本発明の一態様である車両制御装置は、自車両の走行路に対応付けて進行方向前方に設置された道路標識を認識する標識認識部と、進行方向前方の走行路の曲率を認識する走行路認識部と、走行路における自車両の目標走行速度を設定する速度設定部と、走行用アクチュエータと、速度設定部により設定された目標走行速度で自車両が走行するように走行用アクチュエータを制御する走行制御部と、を備える。走行路認識部は、認識した走行路の曲率に基づいてカーブ路を認識する。速度設定部は、本線へ合流する合流車線を自車両が走行しているときに走行路認識部によりカーブ路が認識され、該カーブ路で標識認識部により道路標識が認識されると、目標走行速度を道路標識に基づく第1目標走行速度に設定し、自車両が本線に進入するとき、目標走行速度を第1目標走行速度とは異なる第2目標走行速度に設定する。
【発明の効果】
【0006】
本発明によれば、合流地点付近を走行するときの車速を適切に制御することができる。
【図面の簡単な説明】
【0007】
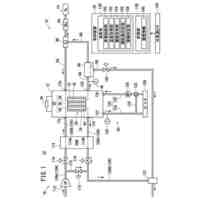
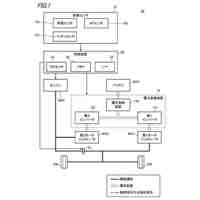
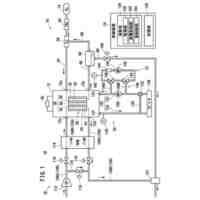
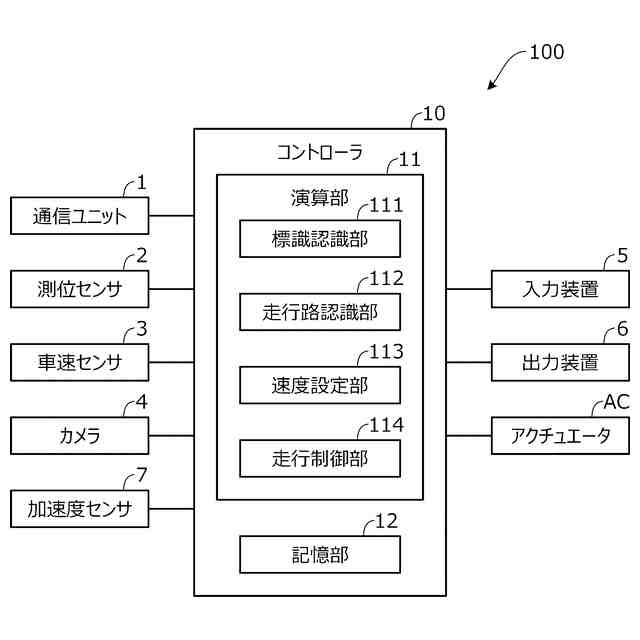
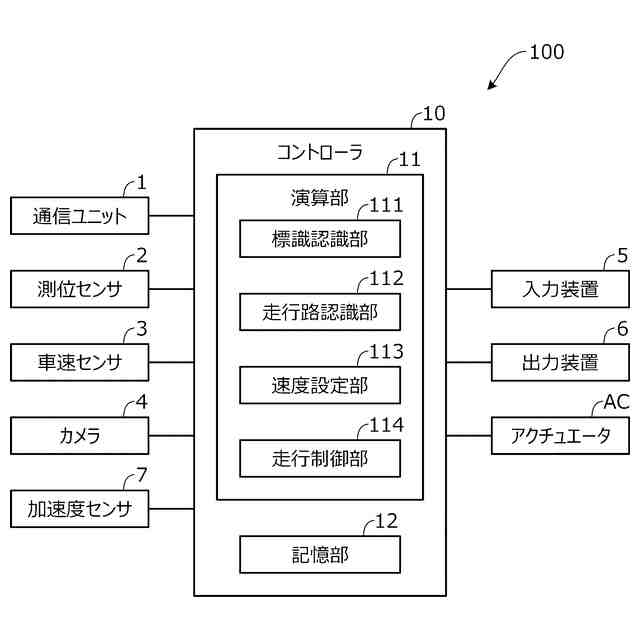
本発明の実施形態に係る車両制御装置の要部構成を概略的に示すブロック図。
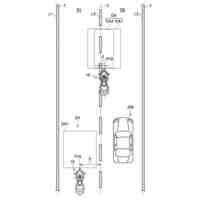
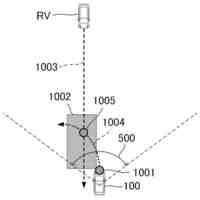
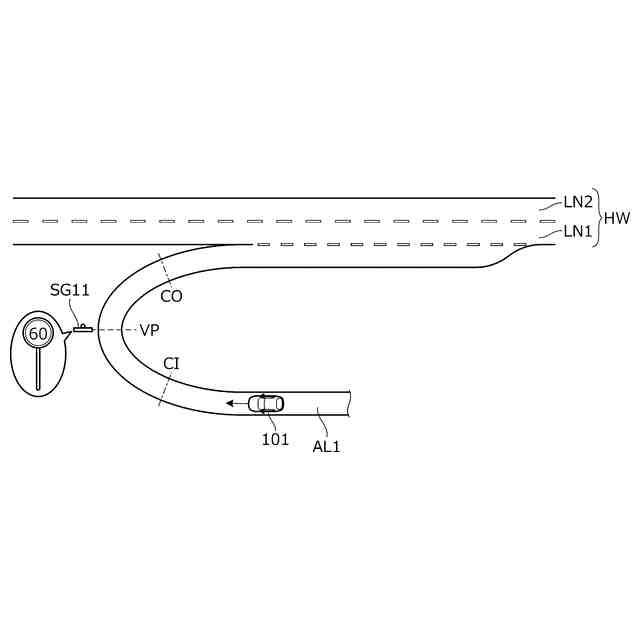
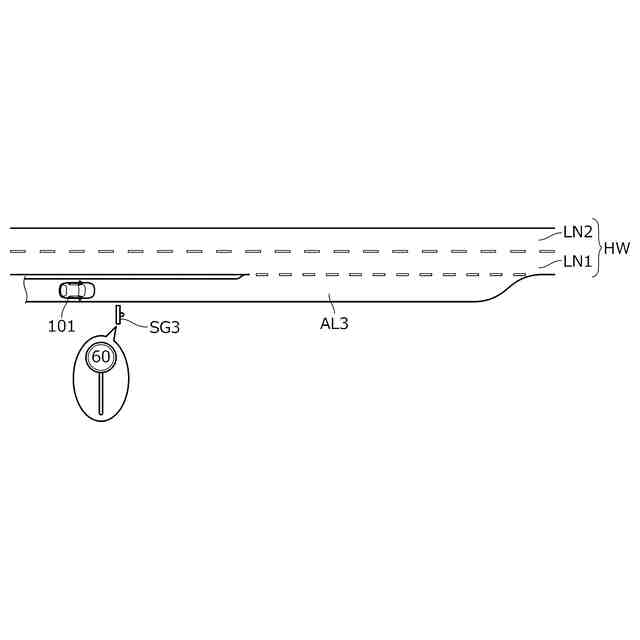
自車両の走行シーンの一例を示す図。
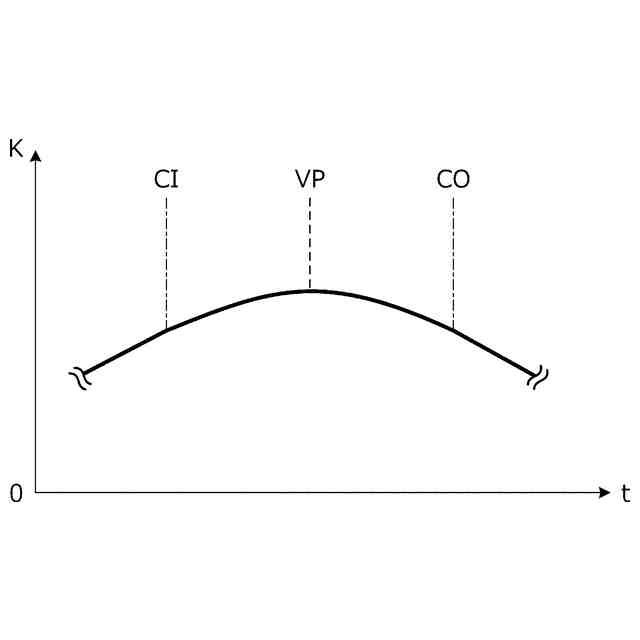
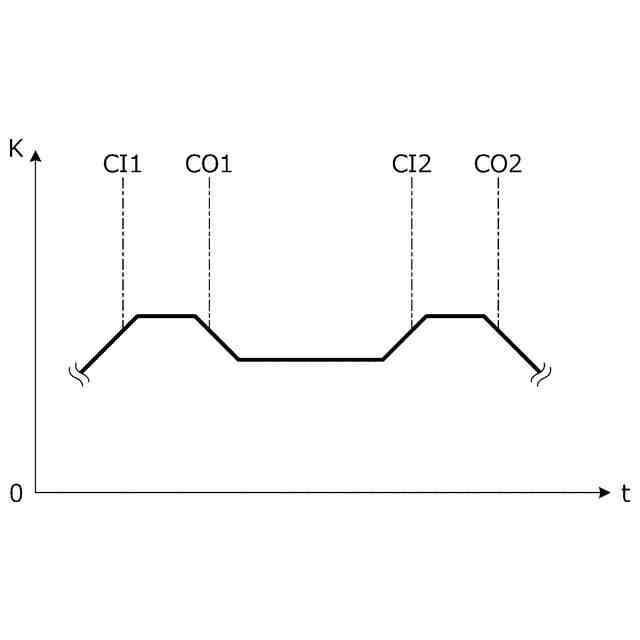
図2Aの合流車線の曲率を示すグラフ。
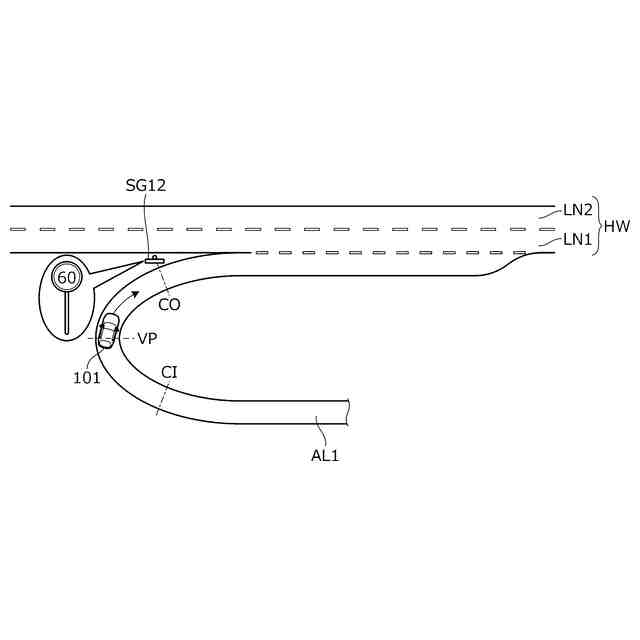
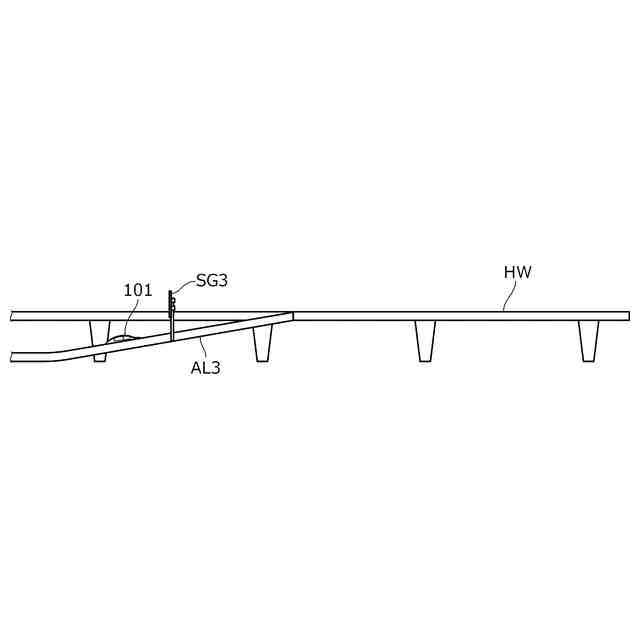
自車両の走行シーンの他の例を示す図。
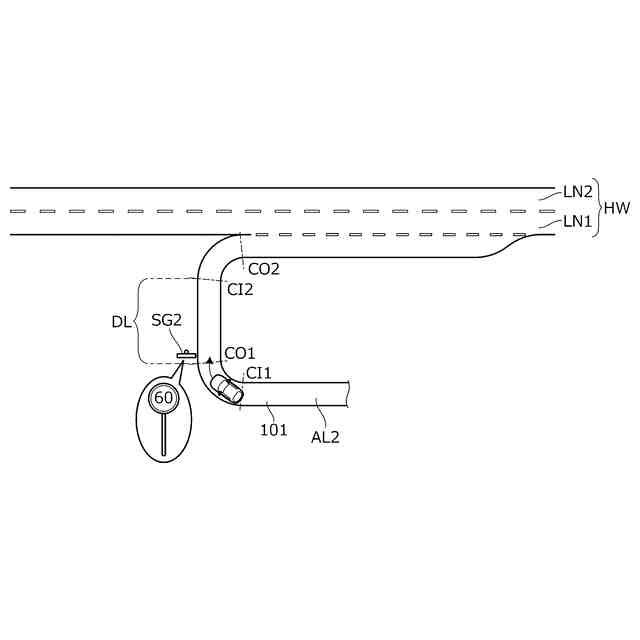
自車両の走行シーンの他の例を示す図。
図4Aの合流車線の曲率を示すグラフ。
自車両の走行シーンの他の例を示す図。
自車両の走行シーンの他の例を示す図。
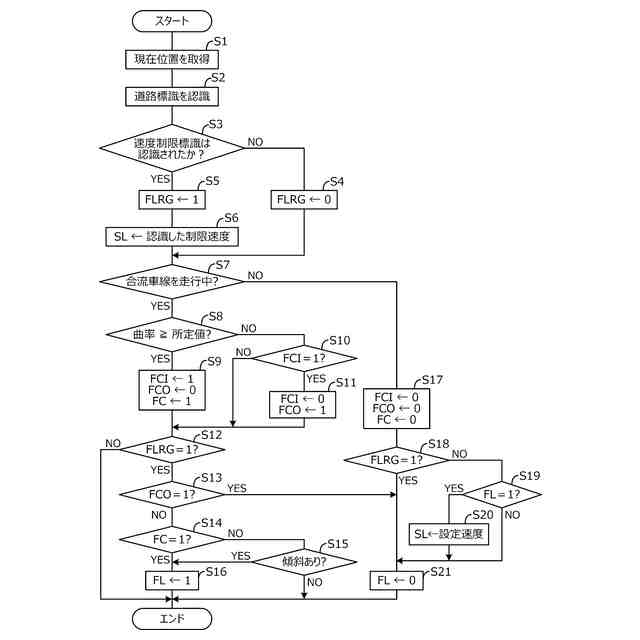
図1のコントローラで実行される処理の一例を示すフローチャート。
自車両の走行シーンの他の例を示す図。
【発明を実施するための形態】
【0008】
以下、図1~図7を参照して本発明の実施形態について説明する。本発明の実施形態に係る車両制御装置は、自動運転機能を有する車両、すなわち自動運転車両に適用することができる。なお、本実施形態に係る車両制御装置が適用される車両を、他車両と区別して自車両と呼ぶことがある。自車両は、内燃機関(エンジン)を走行駆動源として有するエンジン車両、走行モータを走行駆動源として有する電気自動車、エンジンと走行モータとを走行駆動源として有するハイブリッド車両のいずれであってもよい。自車両は、ドライバによる運転操作が不要な自動運転モードでの走行だけでなく、ドライバの運転操作による手動運転モードでの走行も可能である。
【0009】
図1は、本発明の実施形態に係る車両制御装置100の要部構成を概略的に示すブロック図である。図1に示すように、車両制御装置100は、コントローラ10と、コントローラ10にそれぞれ通信可能に接続された通信ユニット1と、測位センサ2と、車速センサ3と、カメラ4と、入力装置5と、出力装置6と、加速度センサ7と、アクチュエータACとを有する。
【0010】
通信ユニット1は、インターネット網や携帯電話網等に代表される無線通信網を含むネットワークを介して図示しない各種サーバと通信し、地図情報および交通情報などを定期的に、あるいは任意のタイミングでサーバから取得する。ネットワークには、公衆無線通信網だけでなく、所定の管理地域ごとに設けられた閉鎖的な通信網、例えば無線LAN、Wi-Fi(登録商標)、Bluetooth(登録商標)等も含まれる。取得した地図情報は、記憶部12に出力され随時更新される。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
本田技研工業株式会社
車両
3日前
本田技研工業株式会社
車両
3日前
本田技研工業株式会社
車両
3日前
本田技研工業株式会社
車両
3日前
本田技研工業株式会社
車両
3日前
本田技研工業株式会社
触媒構造
3日前
本田技研工業株式会社
回転電機
3日前
本田技研工業株式会社
排気装置
3日前
本田技研工業株式会社
制御装置
5日前
本田技研工業株式会社
電動車両
3日前
本田技研工業株式会社
排気装置
3日前
本田技研工業株式会社
鞍乗型車両
3日前
本田技研工業株式会社
鞍乗型車両
5日前
本田技研工業株式会社
車体後部構造
5日前
本田技研工業株式会社
鞍乗り型車両
5日前
本田技研工業株式会社
車両制御装置
3日前
本田技研工業株式会社
鞍乗り型車両
5日前
本田技研工業株式会社
車両制御装置
4日前
本田技研工業株式会社
温度検出装置
6日前
本田技研工業株式会社
鞍乗り型車両
3日前
本田技研工業株式会社
鞍乗り型車両
3日前
本田技研工業株式会社
鞍乗り型車両
3日前
本田技研工業株式会社
フレーム構造
3日前
本田技研工業株式会社
燃料電池システム
3日前
本田技研工業株式会社
車両用前照灯装置
3日前
本田技研工業株式会社
車両用前照灯装置
3日前
本田技研工業株式会社
燃料電池システム
3日前
本田技研工業株式会社
チェーンスプロケット
3日前
本田技研工業株式会社
超音波センサの取付構造
4日前
本田技研工業株式会社
車両のアンテナ設置構造
5日前
本田技研工業株式会社
遠心クラッチ、および車両
5日前
本田技研工業株式会社
クラッチ装置及び鞍乗型車両
4日前
本田技研工業株式会社
固体電池の負極及び固体電池
4日前
本田技研工業株式会社
鞍乗型車両の電装部品支持構造
3日前
本田技研工業株式会社
運転支援装置及び運転支援方法
3日前
本田技研工業株式会社
運転支援装置及び運転支援方法
3日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ