TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025065671
公報種別
公開特許公報(A)
公開日
2025-04-22
出願番号
2023175034
出願日
2023-10-10
発明の名称
監視システム
出願人
三菱ロジスネクスト株式会社
代理人
弁理士法人みのり特許事務所
主分類
G05D
1/00 20240101AFI20250415BHJP(制御;調整)
要約
【課題】コストの増加を抑えつつ荷役作業に係る作業状況を監視可能な監視システムを提供する。
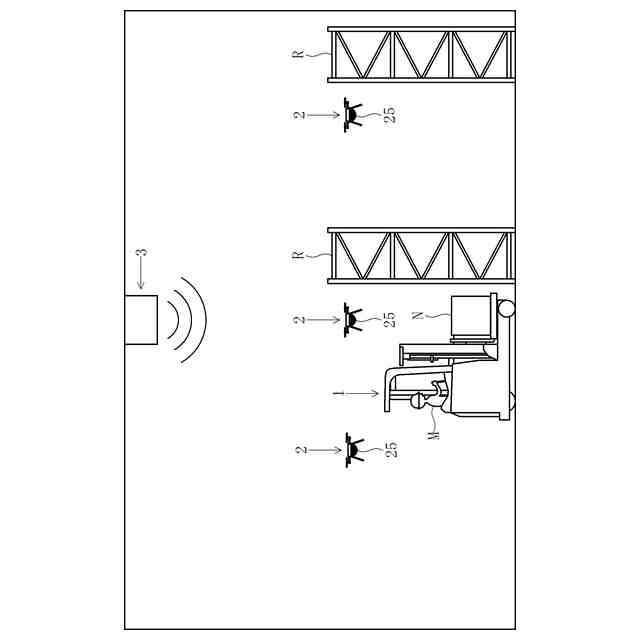
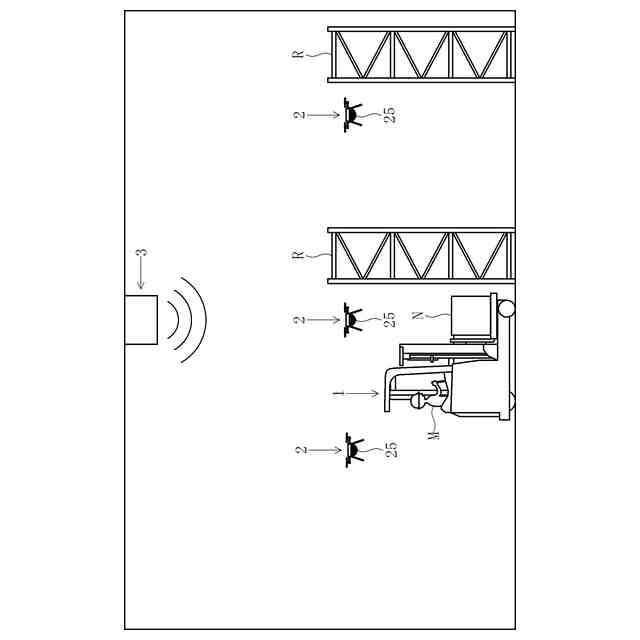
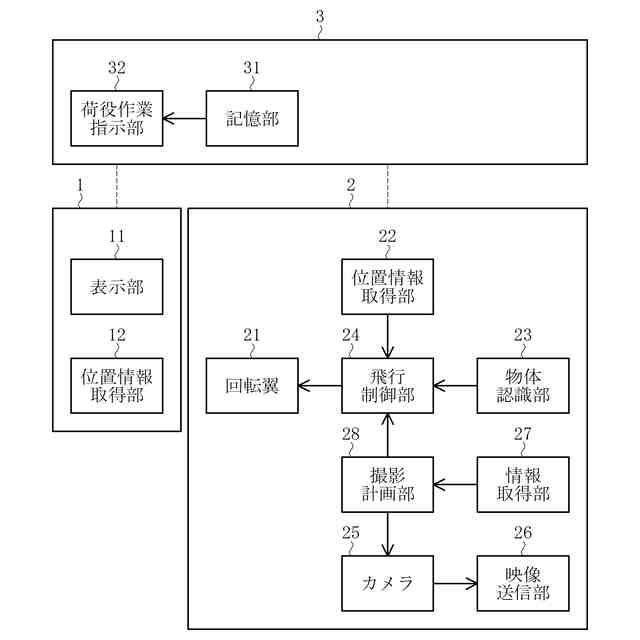
【解決手段】監視システムは、荷役作業者Mが搭乗可能であって、荷役作業者Mが操縦することで荷役作業を行う荷役車両であるフォークリフト1と、自律飛行可能であって、カメラ25が取り付けられた複数の無人飛行体であるドローン2とを備えている。複数のドローン2は、荷役作業が行われる場所まで移動して、荷役作業に係る作業状況をカメラ25で撮影するように飛行する。
【選択図】図1
特許請求の範囲
【請求項1】
荷役作業者が搭乗可能であって、当該荷役作業者が操縦することで荷役作業を行う荷役車両と、
自律飛行可能であって、カメラが取り付けられた複数の無人飛行体と、を備え、
複数の前記無人飛行体は、前記荷役作業が行われる場所まで移動して、当該荷役作業に係る作業状況を前記カメラで撮影するように飛行する
ことを特徴とする監視システム。
続きを表示(約 610 文字)
【請求項2】
複数の前記無人飛行体と通信可能な管理装置をさらに備え、
前記管理装置は、撮影場所に係る撮影場所情報を前記無人飛行体に送信し、
前記無人飛行体は、前記撮影場所情報に従って、前記撮影場所まで飛行して待機する
ことを特徴とする請求項1に記載の監視システム。
【請求項3】
複数の前記無人飛行体と通信可能な管理装置をさらに備え、
前記管理装置は、前記荷役車両を特定可能な車両特定情報を前記無人飛行体に送信し、
前記無人飛行体は、前記車両特定情報に従って、前記荷役車両を追従するように飛行する
ことを特徴とする請求項1に記載の監視システム。
【請求項4】
前記カメラは、複数の撮影モードに切り替え可能に構成され、前記撮影モードを切り替えることで撮影対象または撮影画角が変化するように構成されている
ことを特徴とする請求項1~3のうちいずれか一項に記載の監視システム。
【請求項5】
前記カメラは、前記荷役作業が行われる場所を撮影する荷役場所撮影モードと、前記荷役車両の前方に位置するラックを撮影するラック撮影モードと、前記荷役車両に搭乗している前記荷役作業者を撮影する作業者撮影モードとに切り替え可能に構成されている
ことを特徴とする請求項1~3のうちいずれか一項に記載の監視システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、荷役作業に係る作業状況を監視可能な監視システムに関するものである。
続きを表示(約 1,100 文字)
【背景技術】
【0002】
一般に、倉庫内等の作業環境において、荷役作業時に発生した出来事を確認すること等を目的として、作業状況を監視するカメラを多数の場所に設けることが知られている(例えば特許文献1参照)。
【0003】
特許文献1には、フォークリフトと人との衝突の可能性を判定することを目的として、フォークリフトの周辺を監視するカメラを、倉庫の天井付近や走行路の角部等の予め定められた場所に配置すること、および、フォークリフトに配置することが記載されている。
【0004】
しかしながら、予め定められた場所にカメラを設置する構成では、作業環境が広い場所であるほど多くのカメラが必要となり、コストが嵩むという問題があった。また、フォークリフトにカメラを取り付ける構成では、フォークリフトが多くなるほど導入コストが増加するという問題があった。
【先行技術文献】
【特許文献】
【0005】
特開2023-714号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明は、上記事情に鑑みてなされたものであって、コストの増加を抑えつつ荷役作業に係る作業状況を監視可能な監視システムを提供することを課題とする。
【課題を解決するための手段】
【0007】
上記課題を解決するため、本発明の監視システムは、荷役作業者が搭乗可能であって、当該荷役作業者が操縦することで荷役作業を行う荷役車両と、自律飛行可能であって、カメラが取り付けられた複数の無人飛行体と、を備え、複数の前記無人飛行体は、前記荷役作業が行われる場所まで移動して、当該荷役作業に係る作業状況を前記カメラで撮影するように飛行することを特徴とする。
【0008】
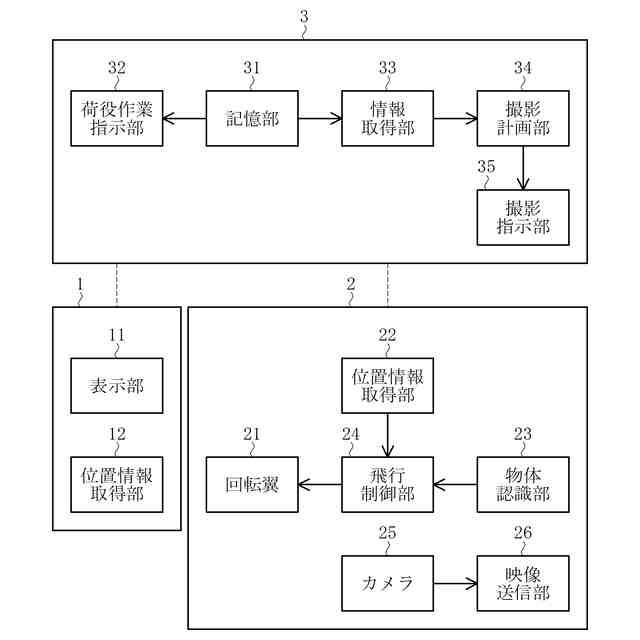
また、複数の前記無人飛行体と通信可能な管理装置をさらに備え、前記管理装置は、撮影場所に係る撮影場所情報を前記無人飛行体に送信し、前記無人飛行体は、前記撮影場所情報に従って、前記撮影場所まで飛行して待機することが好ましい。
【0009】
また、複数の前記無人飛行体と通信可能な管理装置をさらに備え、前記管理装置は、前記荷役車両を特定可能な車両特定情報を前記無人飛行体に送信し、前記無人飛行体は、前記車両特定情報に従って、前記荷役車両を追従するように飛行することが好ましい。
【0010】
また、前記カメラは、複数の撮影モードに切り替え可能に構成され、前記撮影モードを切り替えることで撮影対象または撮影画角が変化するように構成されていることが好ましい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
エイブリック株式会社
基準電圧回路
1か月前
和研工業株式会社
多連レバー機構
1か月前
株式会社クボタ
作業車
1か月前
株式会社ダイフク
搬送車
1か月前
ローム株式会社
半導体集積回路
1か月前
トヨタ自動車株式会社
ペダル機構
2日前
株式会社ダイフク
搬送設備
3日前
エイブリック株式会社
ボルテージレギュレータ
1か月前
トヨタ自動車株式会社
工作機械の制御装置
1か月前
三菱電機株式会社
自己位置推定装置
12日前
トヨタ自動車株式会社
工作機械の制御装置
1か月前
株式会社ダイフク
物品搬送設備
1か月前
トヨタ自動車株式会社
移動体、及び制御方法
10日前
株式会社やまびこ
走行制御装置
1か月前
アズビル株式会社
制御システムおよび制御方法
1か月前
アズビル株式会社
制御システムおよび制御方法
1か月前
株式会社タブチ
減圧弁
27日前
WHILL株式会社
電動モビリティ
11日前
株式会社計数技研
移動体、及びプログラム
3日前
株式会社ダイヘン
搬送車
10日前
日本信号株式会社
自走式装置
17日前
株式会社ダイヘン
搬送車
1か月前
株式会社ダイヘン
搬送車
1か月前
株式会社ダイヘン
搬送車
1か月前
株式会社ダイヘン
搬送車
1か月前
株式会社デンソー
診断装置
1か月前
井関農機株式会社
作業車両
1か月前
株式会社アイシン
自律移動体
17日前
株式会社アイシン
自律移動体
17日前
ミツミ電機株式会社
多方向入力装置
1か月前
FCLコンポーネント株式会社
電源回路および検出装置
27日前
株式会社アイシン
自律移動体
17日前
ミツミ電機株式会社
多方向入力装置
1か月前
株式会社アイシン
自律移動体
17日前
ミツミ電機株式会社
多方向入力装置
1か月前
オルガノ株式会社
運転管理方法及び運転管理装置
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ


































