TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025065614
公報種別
公開特許公報(A)
公開日
2025-04-22
出願番号
2023174921
出願日
2023-10-10
発明の名称
自律走行支援装置、作業車両の制御方法、プログラム及び作業車両
出願人
株式会社やまびこ
代理人
弁理士法人IPX
主分類
G05D
1/43 20240101AFI20250415BHJP(制御;調整)
要約
【課題】既存の作業車両に追加の機能を付加する技術を提供する。
【解決手段】本発明の一態様によれば、作業車両に対して構造的且つ電気的に着脱可能な自律走行支援装置が提供される。この自律走行支援装置における作業車両は、ユーザによる第1の操作入力に応じて走行するように構成される。自律走行支援装置は、少なくとも1つのプロセッサを備える。プロセッサは、自律走行支援装置が作業車両に取り付けられている場合に、次の各ステップがなされるようにプログラムを実行するように構成される。受付ステップでは、ユーザから切替入力を受け付ける。切替入力は、作業車両の走行モードを第1のモード又は第2のモードに切り替えるための入力である。車両制御ステップでは、走行モードが第1のモードに設定されている場合には、第1の操作入力に応じて作業車両を走行させる。走行モードが第2のモードに設定されている場合には、予め設定された自律走行モデルを用いて作業車両を自律的に走行させる。
【選択図】図1
特許請求の範囲
【請求項1】
作業車両に対して構造的且つ電気的に着脱可能な自律走行支援装置であって、
前記作業車両は、ユーザによる第1の操作入力に応じて走行するように構成され、
前記自律走行支援装置は、少なくとも1つのプロセッサを備え、
前記プロセッサは、前記自律走行支援装置が前記作業車両に取り付けられている場合に、次の各ステップがなされるようにプログラムを実行するように構成され、
受付ステップでは、前記ユーザから切替入力を受け付け、ここで前記切替入力は、前記作業車両の走行モードを第1のモード又は第2のモードに切り替えるための入力であり、
車両制御ステップでは、
前記走行モードが前記第1のモードに設定されている場合には、前記第1の操作入力に応じて前記作業車両を走行させ、
前記走行モードが前記第2のモードに設定されている場合には、予め設定された自律走行モデルを用いて前記作業車両を自律的に走行させる、装置。
続きを表示(約 1,600 文字)
【請求項2】
請求項1に記載の自律走行支援装置において、
さらに、前記プロセッサによる第1の切替ステップでは、前記作業車両の位置と、無線通信によって前記切替入力を前記ユーザが入力した位置との距離が所定距離以下の場合には、前記切替入力を受け付けても前記第1のモードから他の前記走行モードに切り替えず、又は、前記切替入力を受け付けなくとも他の前記走行モードから前記第1のモードに切り替える、装置。
【請求項3】
請求項1に記載の自律走行支援装置において、
さらに、前記プロセッサによる
第1の取得ステップでは、前記作業車両の位置情報と範囲指定情報とを取得し、ここで前記範囲指定情報は、前記作業車両による作業範囲を座標によって指定する情報であり、
第2の切替ステップでは、前記作業車両の位置情報と前記範囲指定情報とに基づく位置関係に応じて、前記走行モードを前記第2のモードに切り替える、装置。
【請求項4】
請求項1に記載の自律走行支援装置において、
さらに、前記プロセッサによる
第2の取得ステップでは、前記作業車両に取り付けられたセンサを介して前記作業車両の周囲を示す周囲情報を取得し、
生成ステップでは、前記自律走行モデルと前記周囲情報とに基づいて、第2の操作入力を生成し、
前記車両制御ステップでは、前記走行モードが前記第2のモードに設定されている場合には、前記第2の操作入力に応じて前記作業車両を走行させる、装置。
【請求項5】
請求項4に記載の自律走行支援装置において、
さらに、前記プロセッサによる
特定ステップでは、前記周囲情報に基づいて、前記作業車両から所定距離以内に人物又は障害物が存在するか否かを示す障害物フラグを特定し、
第3の切替ステップでは、前記障害物フラグがオンの場合には、前記切替入力を受け付けても前記第1のモードから他の前記走行モードに切り替えず、又は、前記切替入力を受け付けなくとも他の前記走行モードから前記第1のモードに切り替える、装置。
【請求項6】
請求項5に記載の自律走行支援装置において、
前記第3の切替ステップでは、前記障害物フラグがオンになった後所定時間以内にオフになった場合に、前記走行モードを前記第2のモードに切り替える、装置。
【請求項7】
請求項4に記載の自律走行支援装置において、
さらに、前記プロセッサによる第4の切替ステップでは、特定マーカの位置情報が前記周囲情報として取得された場合に、前記走行モードを前記第2のモードに切り替え、ここで前記特定マーカは、前記作業車両による作業範囲を特定するように設置されたマーカである、装置。
【請求項8】
請求項7に記載の自律走行支援装置において、
前記第4の切替ステップでは、前記第2のモードに切り替えるための前記切替入力があった場合に、前記走行モードを第3のモードに切り替え、
前記車両制御ステップでは、前記走行モードが前記第3のモードに設定されている場合には、前記センサが前記特定マーカの位置情報を取得するために、前記作業車両に自律的に所定の走行をさせる、装置。
【請求項9】
請求項8に記載の自律走行支援装置において、
前記所定の走行は、前記センサの取付け位置を略中心とした地面に対し垂直な軸回りに、前記作業車両が回転する走行である、装置。
【請求項10】
請求項7に記載の自律走行支援装置において、
前記センサは、前記作業車両に対し回動することによって、前記特定マーカの位置情報を取得する、装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、自律走行支援装置、作業車両の制御方法、プログラム及び作業車両に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
特許文献1には、遠隔操縦者が複数の自動運転車両を遠隔監視しているときに、遠隔操縦者が遠隔操縦の対象となる自動運転車両の遠隔操縦に専念し易くすることができる状況を実現可能な制御装置等を提供することが開示されている。
【0003】
この制御装置等は、自律走行モードと遠隔操縦モードとを切り替え可能に構成された複数の自動運転車両を遠隔監視するために使用される制御装置であって、所定のイベント発生時に前記複数の自動運転車両のうち遠隔操縦の対象となる対象車両以外の非対象車両を特定する車両特定部と、対象車両が遠隔操縦装置の操縦に応じて遠隔操縦モードで走行するように制御されるとき、非対象車両が遠隔操縦を必要とする状況を回避するように非対象車両を自律走行させるための遠隔操縦回避制御命令を作成する制御命令作成部と、遠隔操縦回避制御命令を非対象車両に送信する通信部とを備える。
【先行技術文献】
【特許文献】
【0004】
特開2022-179577号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、特許文献1に開示される従来技術は、未だ改善の余地がある。
【0006】
本発明では上記事情に鑑み、既存の作業車両に追加の機能を付加する技術を提供することとした。
【課題を解決するための手段】
【0007】
本発明の一態様によれば、作業車両に対して構造的且つ電気的に着脱可能な自律走行支援装置が提供される。この自律走行支援装置における作業車両は、ユーザによる第1の操作入力に応じて走行するように構成される。自律走行支援装置は、少なくとも1つのプロセッサを備える。プロセッサは、自律走行支援装置が作業車両に取り付けられている場合に、次の各ステップがなされるようにプログラムを実行するように構成される。受付ステップでは、ユーザから切替入力を受け付ける。切替入力は、作業車両の走行モードを第1のモード又は第2のモードに切り替えるための入力である。車両制御ステップでは、走行モードが第1のモードに設定されている場合には、第1の操作入力に応じて作業車両を走行させる。走行モードが第2のモードに設定されている場合には、予め設定された自律走行モデルを用いて作業車両を自律的に走行させる。
【0008】
このような態様によれば、既存の作業車両に追加の機能を付加することができる。
【図面の簡単な説明】
【0009】
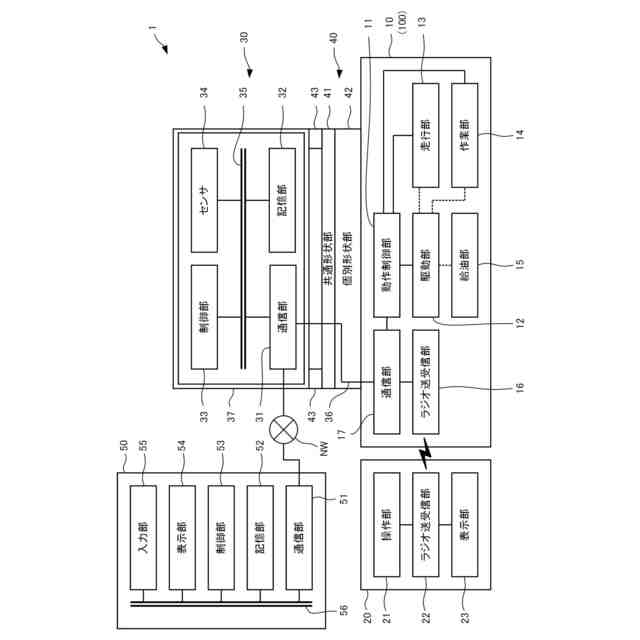
車両システム1の全体構成の一例を示す図である。
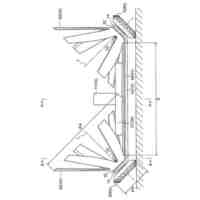
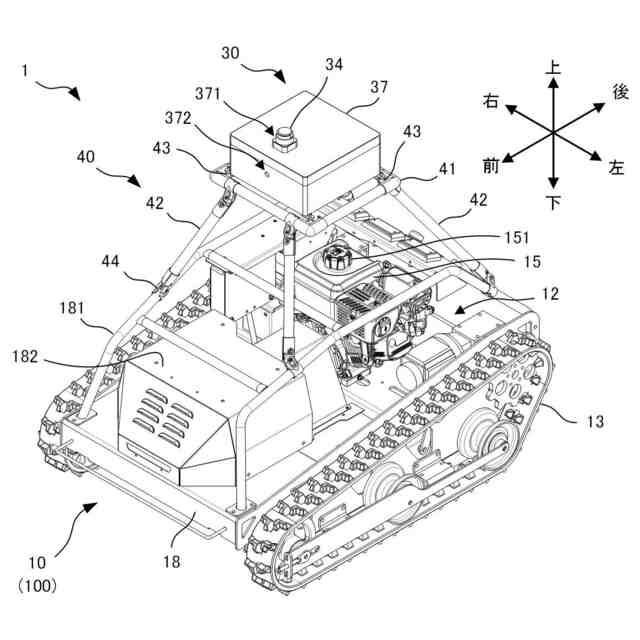
車両システム1の斜視図である。
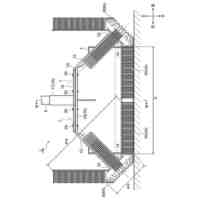
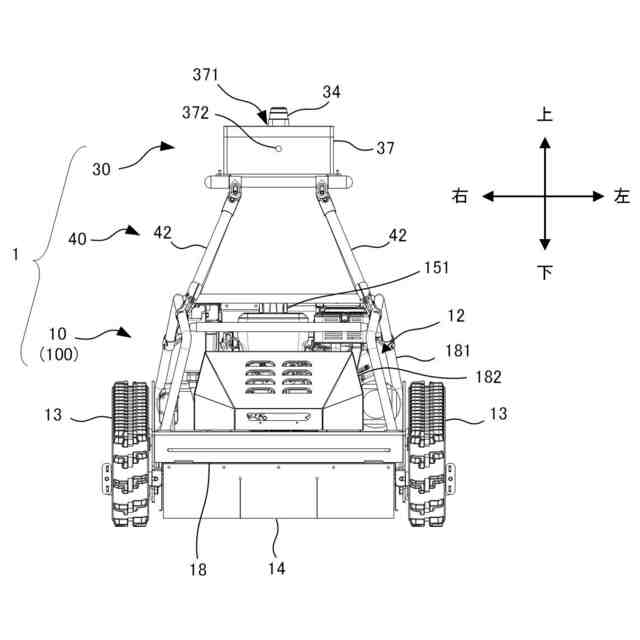
車両システム1の正面図である。
車両システム1の側面図である。
車両システム1の背面図である。
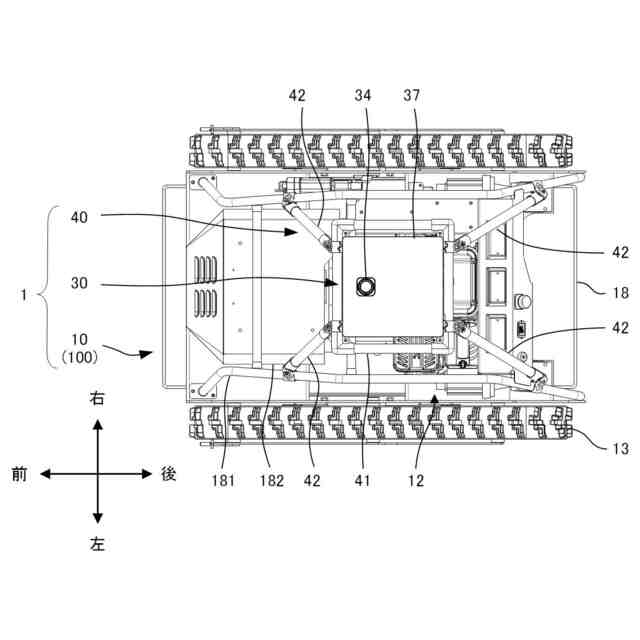
車両システム1の平面図である。
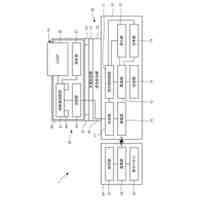
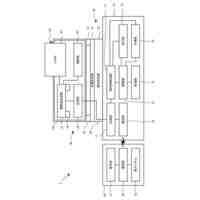
自律走行支援装置30における制御部33等によって実現される機能を示すブロック図である。
車両システム1によって実行される処理の流れを示すアクティビティ図である。
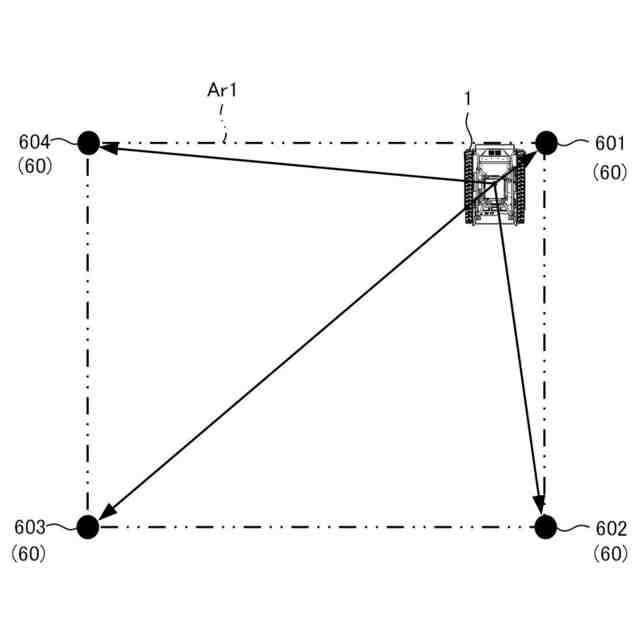
特定マーカ60が設置された領域の一例を示す図である。
特定マーカ60が設置された領域の一例を示す図である。
【発明を実施するための形態】
【0010】
以下、図面を用いて本発明の実施形態について説明する。以下に示す実施形態中で示した各種特徴事項は、互いに組み合わせ可能である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社やまびこ
草刈機
14日前
株式会社やまびこ
回収機
14日前
株式会社やまびこ
走行制御装置
24日前
株式会社やまびこ
機能追加装置
24日前
株式会社やまびこ
機能追加装置及び作業機
24日前
株式会社やまびこ
自律走行支援装置、作業車両の制御方法、プログラム及び作業車両
24日前
エイブリック株式会社
基準電圧回路
1か月前
和研工業株式会社
多連レバー機構
1か月前
株式会社クボタ
作業車
1か月前
ローム株式会社
半導体集積回路
1か月前
株式会社ダイフク
搬送車
1か月前
エイブリック株式会社
ボルテージレギュレータ
1か月前
三菱電機株式会社
自己位置推定装置
3日前
トヨタ自動車株式会社
工作機械の制御装置
1か月前
トヨタ自動車株式会社
工作機械の制御装置
1か月前
愛知機械テクノシステム株式会社
無人搬送車
1か月前
株式会社ダイフク
物品搬送設備
1か月前
トヨタ自動車株式会社
移動体、及び制御方法
1日前
株式会社やまびこ
走行制御装置
24日前
アズビル株式会社
制御システムおよび制御方法
1か月前
アズビル株式会社
制御システムおよび制御方法
1か月前
アズビル株式会社
制御システムおよび制御方法
1か月前
株式会社タブチ
減圧弁
18日前
WHILL株式会社
電動モビリティ
2日前
日本精工株式会社
制御装置および制御方法
1か月前
株式会社ダイヘン
搬送車
1か月前
株式会社ダイヘン
搬送車
1か月前
チームラボ株式会社
走行システム及び走行路
2か月前
株式会社ダイヘン
搬送車
1か月前
株式会社ダイヘン
搬送車
1か月前
日本信号株式会社
自走式装置
8日前
株式会社ダイヘン
搬送車
1日前
村田機械株式会社
稼働監視システム及び稼働監視方法
1か月前
株式会社デンソー
診断装置
22日前
トヨタ自動車株式会社
群制御システム及び群制御方法
1か月前
井関農機株式会社
作業車両
1か月前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ