TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025062299
公報種別
公開特許公報(A)
公開日
2025-04-14
出願番号
2023171261
出願日
2023-10-02
発明の名称
無人搬送装置及びその制御方法
出願人
ダイハツ工業株式会社
代理人
個人
,
個人
,
個人
主分類
G05D
1/43 20240101AFI20250407BHJP(制御;調整)
要約
【課題】複数の無人搬送車を有する無人搬送装置が、誘導ラインの曲線部を走行する際の制御を簡素化する。
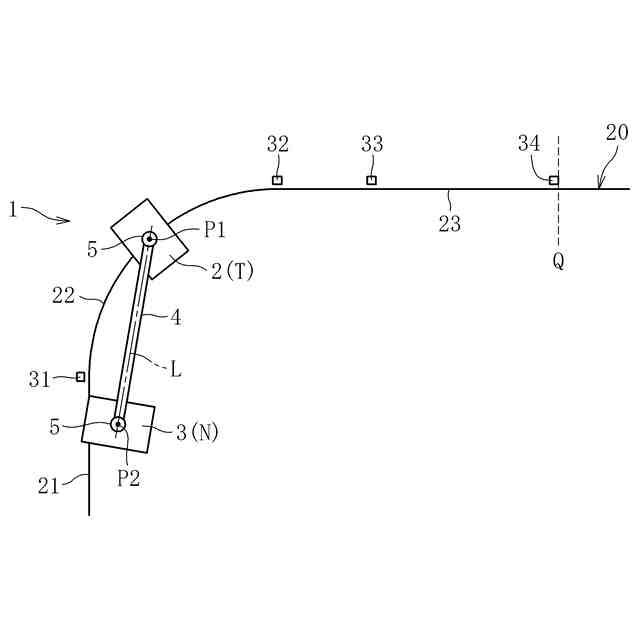
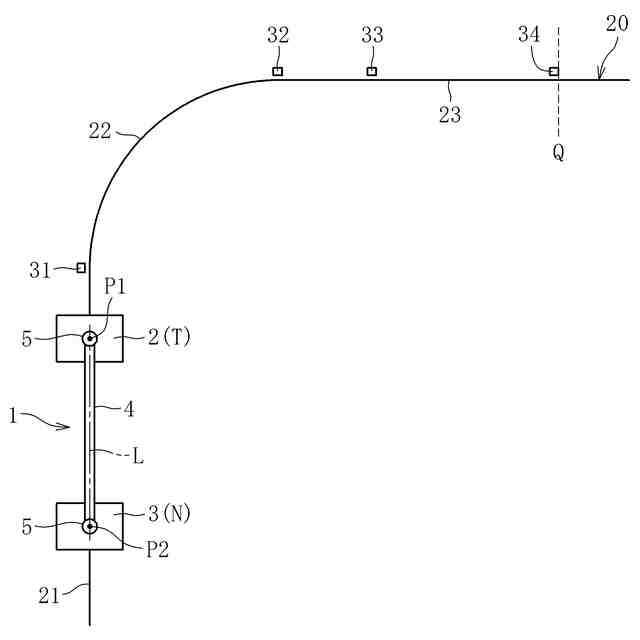
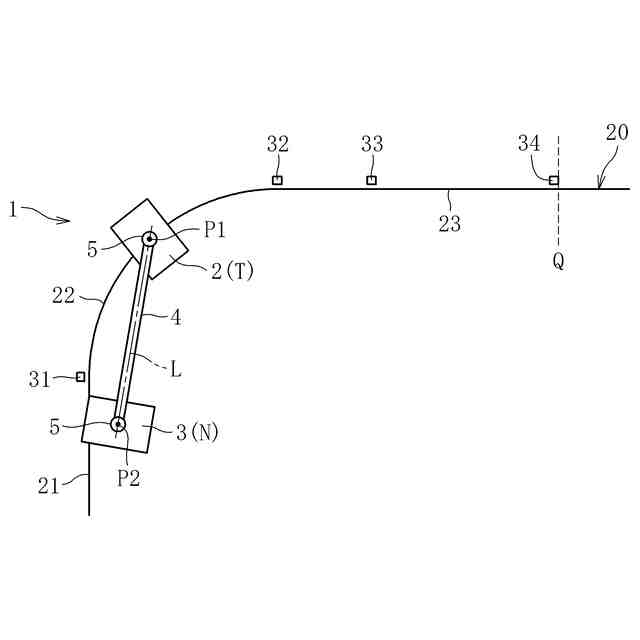
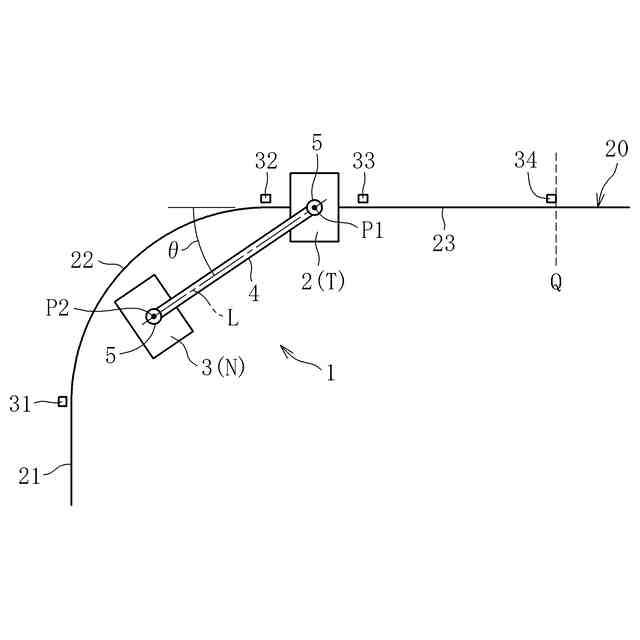
【解決手段】無人搬送装置1は、先行側の第1無人搬送車2及び後行側の第2無人搬送車3を有し、両無人搬送車2、3の間の距離が一定になるように、各無人搬送車2、3を制御する。無人搬送装置1が誘導ライン20の曲線部22に沿って走行する際に、第1無人搬送車2は、誘導ライン20に追従させるトレース走行モードTで制御し、第2無人搬送車3は、誘導ライン20に追従させない自律走行モードNで制御する。
【選択図】図4
特許請求の範囲
【請求項1】
走行路に設けられた誘導ラインに沿って走行可能な先行側の第1無人搬送車及び後行側の第2無人搬送車を有する無人搬送装置の制御方法において、
前記第1無人搬送車と前記第2無人搬送車との間の距離が一定になるように各無人搬送車を制御し、
前記無人搬送装置が前記誘導ラインの曲線部に沿って走行する際に、前記第1無人搬送車は、前記誘導ラインに追従させるトレース走行モードで制御し、前記第2無人搬送車は、前記誘導ラインに追従させない自律走行モードで制御する無人搬送装置の制御方法。
続きを表示(約 790 文字)
【請求項2】
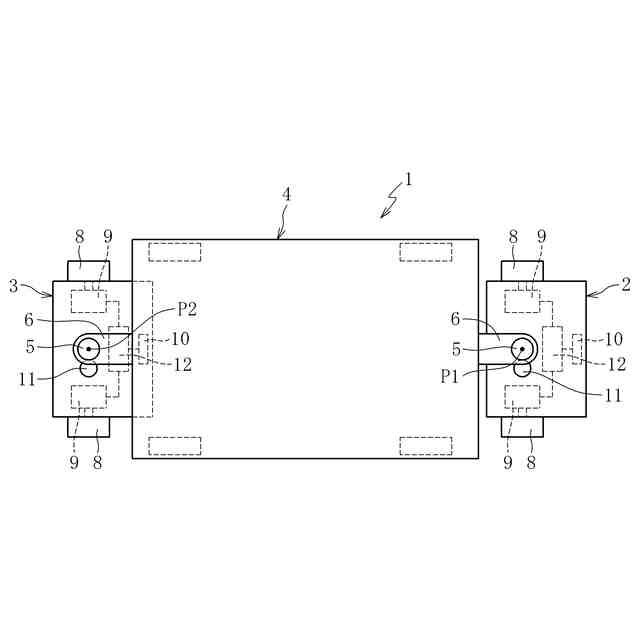
前記無人搬送装置が、前記第1無人搬送車と前記第2無人搬送車とを連結する連結部を有し、
前記第1無人搬送車と前記連結部とが鉛直方向の第1回転軸周りに回転自在に連結され、前記第2無人搬送車と前記連結部とが鉛直方向の第2回転軸周りに回転自在に連結され、
前記第2無人搬送車を前記自律走行モードで制御する際に、前記第2無人搬送車の進行方向を、前記第1回転軸の軸心と前記第2回転軸の軸心とを結ぶ直線と平行になるように制御する請求項1に記載の無人搬送装置の制御方法。
【請求項3】
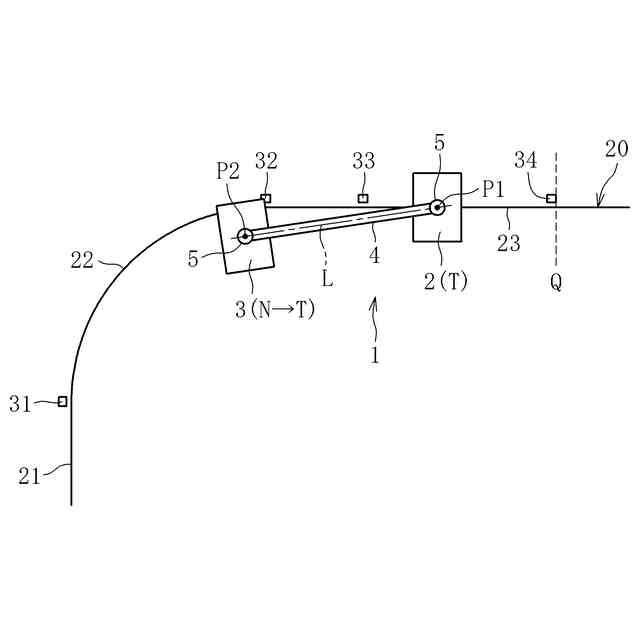
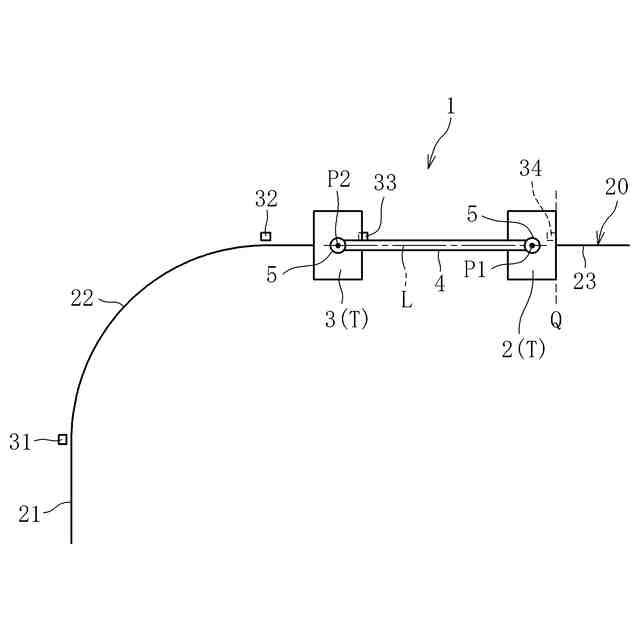
前記第1無人搬送車が、前記誘導ラインの曲線部の後に続く直線部に沿って走行している間に、
前記第2無人搬送車の制御を、前記自律走行モードから、前記誘導ラインに追従させるトレース走行モードに切り換える請求項1に記載の無人搬送装置の制御方法。
【請求項4】
前記無人搬送装置が停止位置へ向けて減速を開始した後に、
前記第2無人搬送車の制御を、前記自律走行モードから、前記誘導ラインに追従させるトレース走行モードに切り換える請求項1に記載の無人搬送装置の制御方法。
【請求項5】
走行路に設けられた誘導ラインに沿って走行可能な先行側の第1無人搬送車及び後行側の第2無人搬送車を有する無人搬送装置において、
前記第1無人搬送車及び前記第2無人搬送車に設けられた制御部が、前記第1無人搬送車と前記第2無人搬送車との間の距離が一定になるように各無人搬送車を制御し、
前記無人搬送装置が前記誘導ラインの曲線部に沿って走行する際に、前記第1無人搬送車の制御部は、前記誘導ラインに追従させるトレース走行モードで制御し、前記第2無人搬送車の制御部は、前記誘導ラインに追従させない自律走行モードで制御する無人搬送装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、無人搬送装置及びその制御方法に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
搬送物を搬送する無人搬送装置(AGV)として、走行路に敷設された誘導ラインを検出しながら、この誘導ラインに沿って走行するものが知られている(例えば、下記の特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特許第5561730号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
大型あるいは長尺の搬送物を搬送する際に、複数の無人搬送車で当該搬送物を搬送することがある。この場合、複数の無人搬送車間の距離が一定になるように、各無人搬送車の速度や走行方向を制御する必要がある。
【0005】
しかし、複数の無人搬送車で、曲線状の誘導ラインに沿って搬送物を搬送する際、複数の無人搬送車を、それぞれ曲線状の誘導ラインから外れないように走行させながら、両無人搬送車間の距離を一定にする必要があるため、各無人搬送車の制御が非常に複雑になる。
【0006】
そこで、本発明は、複数の無人搬送車を有する無人搬送装置を、曲線状の誘導ラインに沿って走行させる際の制御を簡素化することを目的とする。
【課題を解決するための手段】
【0007】
前記課題を解決するために、本発明は、走行路に設けられた誘導ラインに沿って走行可能な先行側の第1無人搬送車及び後行側の第2無人搬送車を有する無人搬送装置の制御方法において、
前記第1無人搬送車と前記第2無人搬送車との間の距離が一定になるように各無人搬送車を制御し、
前記無人搬送装置が前記誘導ラインの曲線部に沿って走行する際に、前記第1無人搬送車は、前記誘導ラインに追従させるトレース走行モードで制御し、前記第2無人搬送車は、前記誘導ラインに追従させない自律走行モードで制御する無人搬送装置の制御方法を提供する。
【0008】
また、本発明は、走行路に設けられた誘導ラインに沿って走行可能な先行側の第1無人搬送車及び後行側の第2無人搬送車を有する無人搬送装置において、
前記第1無人搬送車及び前記第2無人搬送車に設けられた制御部が、前記第1無人搬送車と前記第2無人搬送車との間の距離が一定になるように各無人搬送車を制御し、
前記無人搬送装置が前記誘導ラインの曲線部に沿って走行する際に、前記第1無人搬送車の制御部は、前記誘導ラインに追従させるトレース走行モードで制御し、前記第2無人搬送車の制御部は、前記誘導ラインに追従させない自律走行モードで制御する無人搬送装置を提供する。
【0009】
このように、先行側の第1無人搬送車を誘導ラインに追従させるトレース走行モードで制御する一方で、後行側の第2無人搬送車を誘導ラインに追従させない自律走行モードで制御することで、両無人搬送車を誘導ラインに追従させる場合と比べて、両無人搬送車間の距離を一定にする制御を簡素化することができる。
【0010】
例えば、無人搬送装置が、第1無人搬送車と第2無人搬送車とを連結する連結部を有し、第1無人搬送車と連結部とが鉛直方向の第1回転軸周りに回転自在に連結され、第2無人搬送車と連結部とが鉛直方向の第2回転軸周りに回転自在に連結される場合、第2無人搬送車を自律走行モードで制御する際に、第2無人搬送車の進行方向が第1回転軸の軸心と第2回転軸の軸心とを結ぶ線と平行になるように制御することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
エイブリック株式会社
基準電圧回路
29日前
和研工業株式会社
多連レバー機構
1か月前
スター精密株式会社
工作機械
1か月前
株式会社クボタ
作業車
1か月前
株式会社ダイフク
搬送車
1か月前
ローム株式会社
半導体集積回路
1か月前
エイブリック株式会社
ボルテージレギュレータ
29日前
トヨタ自動車株式会社
工作機械の制御装置
1か月前
トヨタ自動車株式会社
工作機械の制御装置
1か月前
愛知機械テクノシステム株式会社
無人搬送車
1か月前
株式会社ダイフク
物品搬送設備
1か月前
株式会社やまびこ
走行制御装置
17日前
アズビル株式会社
制御システムおよび制御方法
1か月前
アズビル株式会社
制御システムおよび制御方法
1か月前
アズビル株式会社
制御システムおよび制御方法
1か月前
株式会社タブチ
減圧弁
11日前
日本精工株式会社
制御装置および制御方法
1か月前
トヨタ自動車株式会社
自律走行装置
2か月前
チームラボ株式会社
走行システム及び走行路
1か月前
日本信号株式会社
自走式装置
1日前
株式会社ダイヘン
搬送車
29日前
株式会社ダイヘン
搬送車
29日前
株式会社ダイヘン
搬送車
29日前
株式会社ダイヘン
搬送車
29日前
ローム株式会社
半導体装置
2か月前
井関農機株式会社
作業車両
25日前
トヨタ自動車株式会社
群制御システム及び群制御方法
1か月前
村田機械株式会社
稼働監視システム及び稼働監視方法
1か月前
株式会社デンソー
診断装置
15日前
日本精工株式会社
制御システムおよび制御方法
2か月前
ミツミ電機株式会社
多方向入力装置
1か月前
ローム株式会社
バイアス回路
1か月前
オルガノ株式会社
運転管理方法及び運転管理装置
1か月前
ミツミ電機株式会社
多方向入力装置
1か月前
ミツミ電機株式会社
多方向入力装置
1か月前
ミツミ電機株式会社
多方向入力装置
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ


































