TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025059773
公報種別
公開特許公報(A)
公開日
2025-04-10
出願番号
2023170069
出願日
2023-09-29
発明の名称
制御装置、制御方法、およびプログラム
出願人
本田技研工業株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
G05D
1/43 20240101AFI20250403BHJP(制御;調整)
要約
【課題】曲率の小さい物体のコーナーに移動体が接触するのを防止すること。
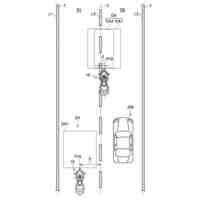
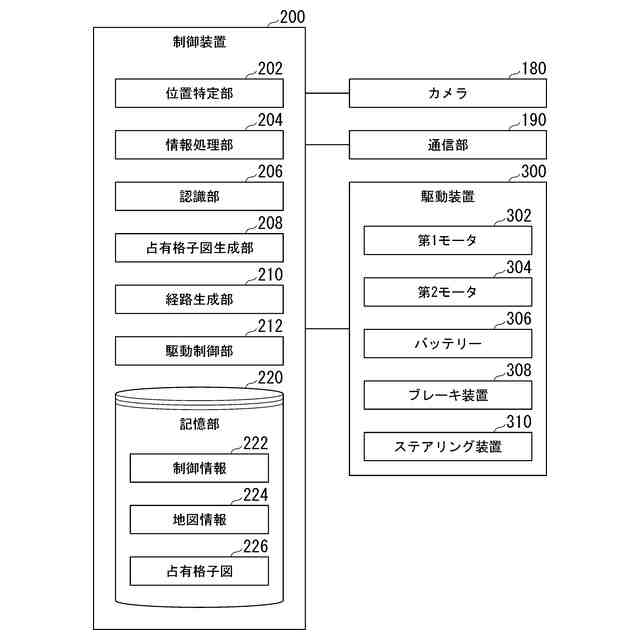
【解決手段】移動体の周辺の状況が撮像された画像に基づいて、前記移動体の周辺に存在する物体の位置を認識する認識部と、前記移動体の周辺に存在する物体の位置に基づいて、複数の格子を含む占有格子図を生成する占有格子図生成部と、前記占有格子図に基づき、前記移動体が進むべき経路を生成する経路生成部と、を備え、前記占有格子図生成部は、前記移動体の周辺に存在する物体の位置に基づいて、前記占有格子図における複数の格子の各々に対して、物体が存在するか否かを判定し、物体が存在すると判定された格子を含む第1領域を膨張させる、制御装置。
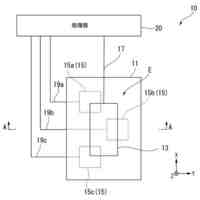
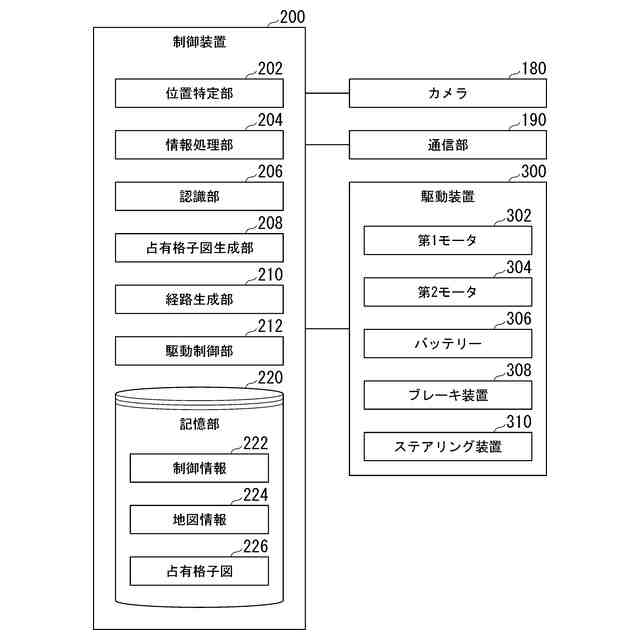
【選択図】図3
特許請求の範囲
【請求項1】
移動体の周辺の状況が撮像された画像に基づいて、前記移動体の周辺に存在する物体の位置を認識する認識部と、
前記移動体の周辺に存在する物体の位置に基づいて、複数の格子を含む占有格子図を生成する占有格子図生成部と、
前記占有格子図に基づき、前記移動体が進むべき経路を生成する経路生成部と、を備え、
前記占有格子図生成部は、
前記移動体の周辺に存在する物体の位置に基づいて、前記占有格子図における複数の格子の各々に対して、物体が存在するか否かを判定し、
物体が存在すると判定された格子を含む第1領域を膨張させる、
制御装置。
続きを表示(約 1,300 文字)
【請求項2】
前記占有格子図生成部は、
前記第1領域のコーナーを検出し、
前記占有格子図において前記コーナーを膨張させる、
請求項1に記載の制御装置。
【請求項3】
前記経路生成部は、前記コーナーを膨張させられた前記占有格子図に基づき、前記第1領域を含まない第2領域において前記移動体が進むべき経路を生成し、
前記経路に沿って前記移動体が移動するよう、前記移動体を駆動する駆動装置を制御する駆動制御部を更に備える、
請求項2に記載の制御装置。
【請求項4】
前記占有格子図生成部は、前記コーナーの位置に正多角形の領域を配置することで前記コーナーを膨張させる、
請求項2に記載の制御装置。
【請求項5】
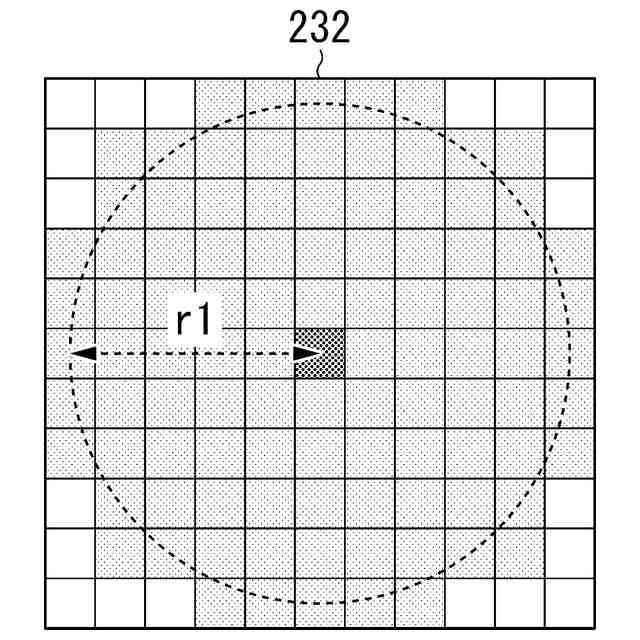
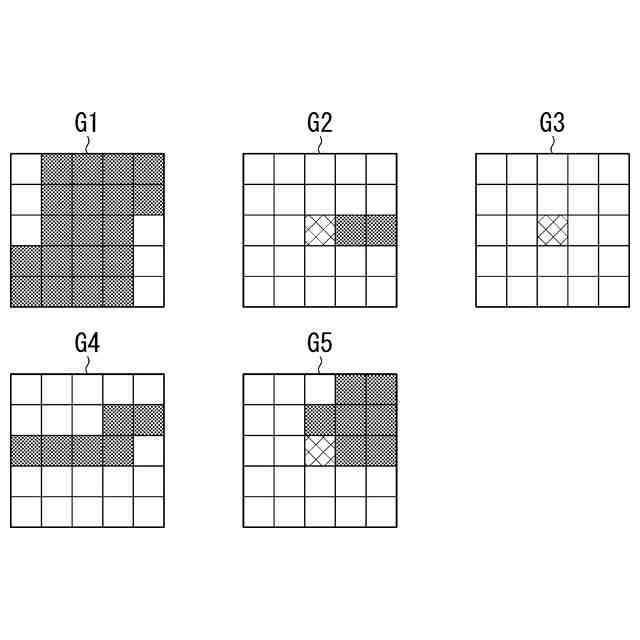
前記占有格子図生成部は、物体が存在すると判定された第1格子を中心とした第1範囲内に、物体が存在すると判定された、前記第1格子とは異なる第2格子が存在する場合、前記第1格子と前記第2格子とを直線で結ぶ領域に対して物体が存在すると判定することで、前記第1領域を直線的に膨張させる、
請求項1に記載の制御装置。
【請求項6】
前記占有格子図生成部は、物体が存在すると判定された第3格子を中心とした第2範囲内における前記第1領域の占める割合に応じて、前記第3格子が前記コーナーであるか否かを判定する、
請求項2に記載の制御装置。
【請求項7】
前記占有格子図生成部は、
前記割合が第1閾値以上である場合、前記第3格子は前記コーナーではないと判定し、
前記割合が前記第1閾値よりも小さい第2閾値未満である場合、前記第3格子は前記コーナーであると判定し、
前記割合が前記第1閾値未満かつ前記第2閾値以上である場合、前記第2範囲内において前記第1領域に含まれる複数の格子の各々の座標に基づいて相関係数を求め、前記相関係数に応じて前記第3格子が前記コーナーであるか否かを判定する、
請求項6に記載の制御装置。
【請求項8】
前記占有格子図生成部は、複数フレームの前記画像が撮像される際、前記複数フレームにわたって前記複数の格子の各々に対して前記コーナーであるか否かを判定し、前記コーナーであると判定された回数が所定回数以上である格子を前記コーナーとして検出する、
請求項2に記載の制御装置。
【請求項9】
前記経路生成部は、前記経路においてサブゴールとなる位置を設定し、
前記占有格子図生成部は、前記サブゴールから所定範囲内の前記コーナーについては膨張させる一方、前記サブゴールから所定範囲外の前記コーナーについては膨張させない、
請求項2に記載の制御装置。
【請求項10】
前記占有格子図生成部は、前記コーナーの位置に正多角形の領域を配置することで前記コーナーを膨張させ、
前記経路生成部は、前記正多角形の頂点を前記経路に組み込む、
請求項2に記載の制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、制御装置、制御方法、およびプログラムに関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
従来、予め設定された目的地まで自律的に移動する移動体が知られている。また、障害物等の物体との距離を感知して確率的に分布する格子点からなる占有率格子地図を作成し、移動体の半径または大きさに基づき占有率格子地図内の物体の厚さを厚くすることにより構成空間地図を作成する技術が提案されている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2008-47095号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来の技術では、物体に移動体が接触する場合があった。
【0005】
本発明は、このような事情を考慮してなされたものであり、物体に移動体が接触するのを防止することができる情報処理システムを提供することを目的の一つとする。
【課題を解決するための手段】
【0006】
この発明に係る制御装置、制御方法、およびプログラムは、以下の構成を採用した。
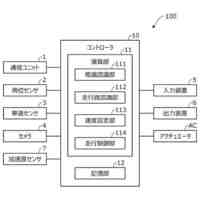
(1):この発明の一態様に係る制御装置は、移動体の周辺の状況が撮像された画像に基づいて、前記移動体の周辺に存在する物体の位置を認識する認識部と、前記移動体の周辺に存在する物体の位置に基づいて、複数の格子を含む占有格子図を生成する占有格子図生成部と、前記占有格子図に基づき、前記移動体が進むべき経路を生成する経路生成部と、を備え、前記占有格子図生成部は、前記移動体の周辺に存在する物体の位置に基づいて、前記占有格子図における複数の格子の各々に対して、物体が存在するか否かを判定し、物体が存在すると判定された格子を含む第1領域を膨張させる、制御装置である。
【0007】
(2):上記(1)の態様において、前記占有格子図生成部は、前記第1領域のコーナーを検出し、前記占有格子図において前記コーナーを膨張させるものである。
【0008】
(3):上記(2)の態様において、前記経路生成部は、前記コーナーを膨張させられた前記占有格子図に基づき、前記第1領域を含まない第2領域において前記移動体が進むべき経路を生成し、前記制御装置は、前記経路に沿って前記移動体が移動するよう、前記移動体を駆動する駆動装置を制御する駆動制御部を更に備えるものである。
【0009】
(4):上記(2)の態様において、前記占有格子図生成部は、前記コーナーの位置に正多角形の領域を配置することで前記コーナーを膨張させるものである。
【0010】
(5):上記(1)の態様において、前記占有格子図生成部は、物体が存在すると判定された第1格子を中心とした第1範囲内に、物体が存在すると判定された、前記第1格子とは異なる第2格子が存在する場合、前記第1格子と前記第2格子とを直線で結ぶ領域に対して物体が存在すると判定することで、前記第1領域を直線的に膨張させるものである。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
本田技研工業株式会社
車両
5日前
本田技研工業株式会社
車両
5日前
本田技研工業株式会社
車両
5日前
本田技研工業株式会社
車両
5日前
本田技研工業株式会社
車両
5日前
本田技研工業株式会社
電動車両
5日前
本田技研工業株式会社
制御装置
7日前
本田技研工業株式会社
回転電機
5日前
本田技研工業株式会社
触媒構造
5日前
本田技研工業株式会社
排気装置
5日前
本田技研工業株式会社
排気装置
5日前
本田技研工業株式会社
回転電機
1日前
本田技研工業株式会社
力センサ
8日前
本田技研工業株式会社
鞍乗型車両
5日前
本田技研工業株式会社
鞍乗型車両
7日前
本田技研工業株式会社
鞍乗り型車両
5日前
本田技研工業株式会社
鞍乗り型車両
5日前
本田技研工業株式会社
鞍乗り型車両
5日前
本田技研工業株式会社
車体後部構造
7日前
本田技研工業株式会社
鞍乗り型車両
7日前
本田技研工業株式会社
フレーム構造
5日前
本田技研工業株式会社
温度検出装置
8日前
本田技研工業株式会社
車両制御装置
5日前
本田技研工業株式会社
車両制御装置
6日前
本田技研工業株式会社
鞍乗り型車両
7日前
本田技研工業株式会社
鞍乗り型車両
1日前
本田技研工業株式会社
車両用前照灯装置
5日前
本田技研工業株式会社
車両用前照灯装置
5日前
本田技研工業株式会社
燃料製造システム
1日前
本田技研工業株式会社
燃料電池システム
5日前
本田技研工業株式会社
燃料電池システム
5日前
本田技研工業株式会社
チェーンスプロケット
5日前
本田技研工業株式会社
車両のアンテナ設置構造
7日前
本田技研工業株式会社
超音波センサの取付構造
6日前
本田技研工業株式会社
遠心クラッチ、および車両
7日前
本田技研工業株式会社
クラッチ装置及び鞍乗型車両
6日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ