TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025058736
公報種別
公開特許公報(A)
公開日
2025-04-09
出願番号
2023168866
出願日
2023-09-28
発明の名称
搬送装置、成形装置、および物品の製造方法
出願人
キヤノン株式会社
代理人
弁理士法人大塚国際特許事務所
主分類
H01L
21/677 20060101AFI20250402BHJP(基本的電気素子)
要約
【課題】複数のハンドを支持する支持部材を高さ方向に駆動するように構成された搬送装置において、各ハンドによる部材の搬送を精度よく制御するために有利な技術を提供する。
【解決手段】搬送装置は、第1部材を保持する第1ハンドと、第2部材を保持する第2ハンドと、前記第1ハンドおよび前記第2ハンドを支持する支持部材と、前記支持部材を高さ方向に駆動することにより、前記第1ハンドおよび前記第2ハンドを前記高さ方向に駆動する駆動部と、前記第1ハンドにより前記第1部材を第1保持部に搬送する第1処理、および、前記第2ハンドにより前記第2部材を第2保持部に搬送する第2処理を制御する制御部と、を備え、前記制御部は、前記第1処理における前記第1保持部の移動から決定された前記駆動部の駆動誤差に基づいて、前記第2処理における前記駆動部による前記第2ハンドの駆動を制御する。
【選択図】図1
特許請求の範囲
【請求項1】
第1部材を保持する第1ハンドと、
第2部材を保持する第2ハンドと、
前記第1ハンドおよび前記第2ハンドを支持する支持部材と、
前記支持部材を高さ方向に駆動することにより、前記第1ハンドおよび前記第2ハンドを前記高さ方向に駆動する駆動部と、
前記第1ハンドにより前記第1部材を第1保持部に搬送する第1処理、および、前記第2ハンドにより前記第2部材を第2保持部に搬送する第2処理を制御する制御部と、
を備え、
前記第1保持部は、前記高さ方向に移動可能に構成され、
前記第1処理では、前記駆動部により前記第1ハンドを前記高さ方向に駆動した後、前記第1ハンドにより保持されている前記第1部材と前記第1保持部とが接触するように前記第1保持部を前記高さ方向に移動させ、
前記制御部は、前記第1処理における前記第1保持部の移動から決定された前記駆動部の駆動誤差に基づいて、前記第2処理における前記駆動部による前記第2ハンドの駆動を制御する、ことを特徴とする搬送装置。
続きを表示(約 1,400 文字)
【請求項2】
前記第1処理において、前記第1ハンドは、目標高さになるように前記駆動部により駆動され、
前記制御部は、前記第1処理における前記第1保持部の移動に基づいて前記第1ハンドの高さを推定高さとして求め、前記推定高さと前記目標高さとの差を前記駆動誤差として決定する、ことを特徴とする請求項1に記載の搬送装置。
【請求項3】
前記制御部は、前記第1処理において前記第1部材と前記第1保持部とが接触したときの前記第1保持部の高さに基づいて前記推定高さを求める、ことを特徴とする請求項2に記載の搬送装置。
【請求項4】
前記制御部は、前記第1処理において前記第1部材と前記第1保持部とが接触するように前記第1保持部を前記高さ方向に移動させた移動量に基づいて前記推定高さを求める、ことを特徴とする請求項2に記載の搬送装置。
【請求項5】
前記制御部は、前記駆動誤差に基づいて、前記第2処理において前記第2ハンドを駆動するために前記駆動部に供給される指令値を補正する、ことを特徴とする請求項1に記載の搬送装置。
【請求項6】
前記制御部は、前記駆動誤差が閾値より大きい場合に前記第2処理の実行を中止する、ことを特徴とする請求項1に記載の搬送装置。
【請求項7】
前記制御部は、前記駆動誤差が閾値より大きい場合に報知を行う、ことを特徴とする請求項1に記載の搬送装置。
【請求項8】
前記高さ方向における前記第1ハンドと前記第2ハンドとの間隔の経時的な変化を検出する検出部を更に備え、
前記制御部は、前記検出部の検出結果に更に基づいて、前記第2処理における前記駆動部による前記第2ハンドの駆動を制御する、ことを特徴とする請求項1に記載の搬送装置。
【請求項9】
第1部材を保持する第1ハンドと、
第2部材を保持する第2ハンドと、
前記第1ハンドおよび前記第2ハンドを支持する支持部材と、
前記支持部材を高さ方向に駆動することにより、前記第1ハンドおよび前記第2ハンドを前記高さ方向に駆動する駆動部と、
前記第1ハンドにより前記第1部材を第1保持部に搬送する第1処理、および、前記第2ハンドにより前記第2部材を第2保持部に搬送する第2処理を制御する制御部と、
前記第1ハンドにより保持されている前記第1部材の高さを検出する検出部と、
を備え、
前記第1処理では、前記駆動部により前記第1ハンドを前記高さ方向に駆動した後、前記第1ハンドにより保持されている前記第1部材の高さを前記検出部に検出させ、
前記制御部は、前記第1処理における前記検出部の検出結果から決定された前記駆動部の駆動誤差に基づいて、前記第2処理における前記駆動部による前記第2ハンドの駆動を制御する、ことを特徴とする搬送装置。
【請求項10】
型を用いて基板上の組成物を成形する成形装置であって、
前記型を保持する第1保持部と、
前記基板を保持する第2保持部と、
請求項1乃至9のいずれか1項に記載の搬送装置と、
を備え、
前記搬送装置は、前記第1部材としての前記型を前記第1保持部に搬送し、前記第2部材としての前記基板を前記第2保持部に搬送する、ことを特徴とする成形装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、搬送装置、成形装置、および物品の製造方法に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
原版を用いて基板上にパターンを形成するリソグラフィ装置では、例えば、原版や基板などの部材を保持して搬送する搬送装置が設けられうる。このような搬送装置では、経時変化や周囲環境などに起因して、部材を保持して移動するハンドの実際の位置が設計上の位置(目標位置)に対してずれてしまうといった異常が生じる場合がある。このような異常が生じていると、ハンドによる部材の搬送中にハンドや当該部材がリソグラフィ装置内の他の部品に意図せずに接触し、それらが破損する可能性がある。特許文献1には、基板保持部により基板が保持された状態か否かで変化する吸引路の圧力の時系列データに基づいて、基板保持部の昇降中に基板の受け渡しが行われた受け渡し高さ位置の情報を取得することが記載されている。
【先行技術文献】
【特許文献】
【0003】
特開2017-139261号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
搬送装置では、複数のハンドを支持する支持部材を高さ方向に駆動することによって、当該複数のハンドの各々を高さ方向に駆動するものがある。このような搬送装置では、支持部材を駆動する際の駆動誤差を簡易な方法によって求め、複数のハンドの各々による部材の搬送を精度よく制御することが望まれている。
【0005】
そこで、本発明は、複数のハンドを支持する支持部材を高さ方向に駆動するように構成された搬送装置において、各ハンドによる部材の搬送を精度よく制御するために有利な技術を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するために、本発明の一側面としての搬送装置は、第1部材を保持する第1ハンドと、第2部材を保持する第2ハンドと、前記第1ハンドおよび前記第2ハンドを支持する支持部材と、前記支持部材を高さ方向に駆動することにより、前記第1ハンドおよび前記第2ハンドを前記高さ方向に駆動する駆動部と、前記第1ハンドにより前記第1部材を第1保持部に搬送する第1処理、および、前記第2ハンドにより前記第2部材を第2保持部に搬送する第2処理を制御する制御部と、を備え、前記第1保持部は、前記高さ方向に移動可能に構成され、前記第1処理では、前記駆動部により前記第1ハンドを前記高さ方向に駆動した後、前記第1ハンドにより保持されている前記第1部材と前記第1保持部とが接触するように前記第1保持部を前記高さ方向に移動させ、前記制御部は、前記第1処理における前記第1保持部の移動から決定された前記駆動部の駆動誤差に基づいて、前記第2処理における前記駆動部による前記第2ハンドの駆動を制御する、ことを特徴とする。
【0007】
本発明の更なる目的又はその他の側面は、以下、添付図面を参照して説明される好ましい実施形態によって明らかにされるであろう。
【発明の効果】
【0008】
本発明によれば、例えば、複数のハンドを支持する支持部材を高さ方向に駆動するように構成された搬送装置において、各ハンドによる部材の搬送を精度よく制御するために有利な技術を提供することができる。
【図面の簡単な説明】
【0009】
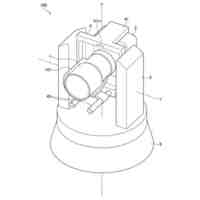
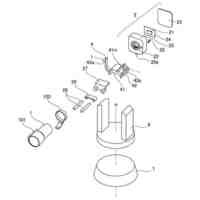
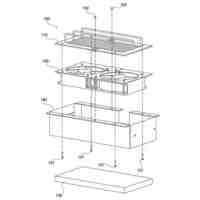
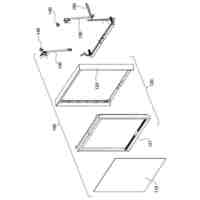
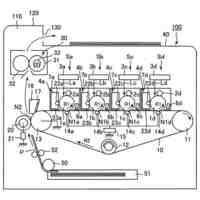
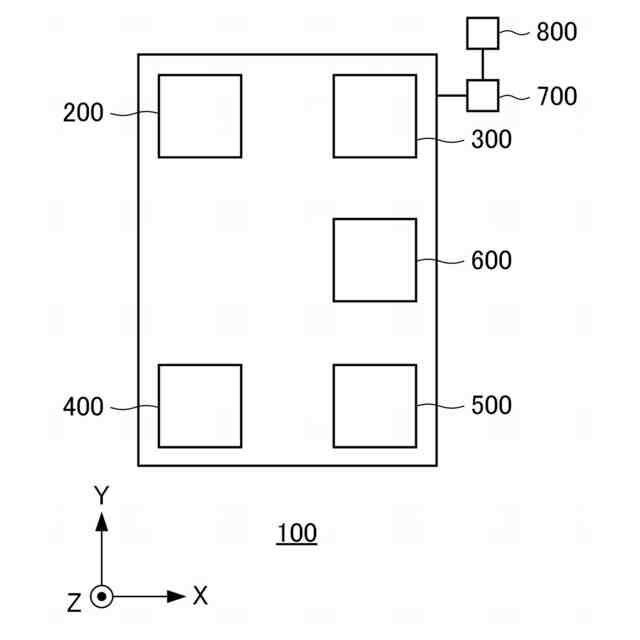
平坦化装置の構成例を示す概略図
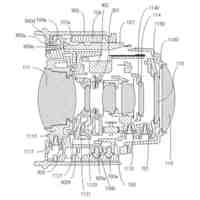
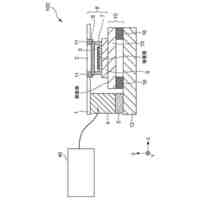
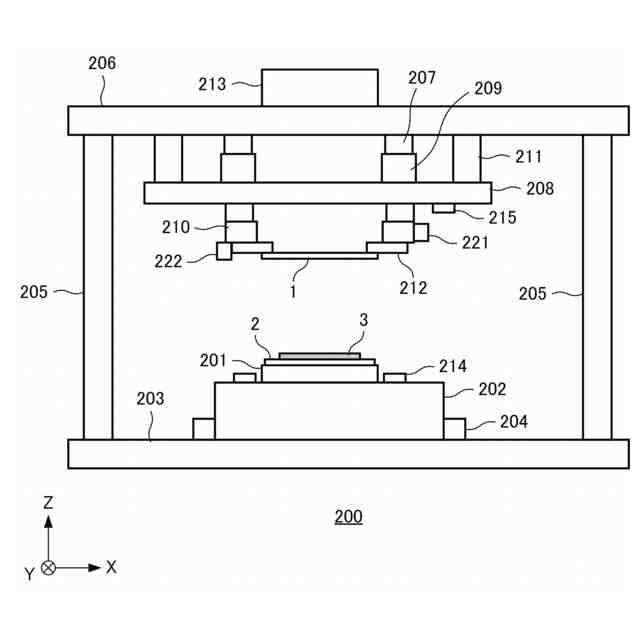
平坦化モジュールの構成例を示す概略図
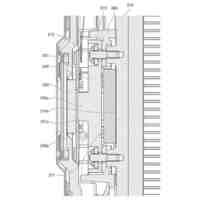
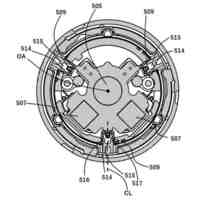
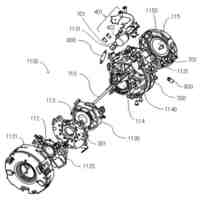
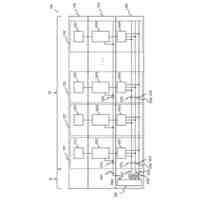
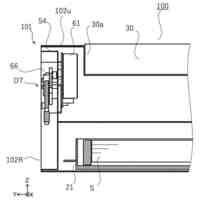
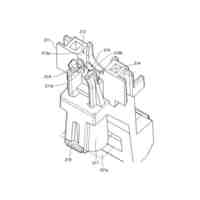
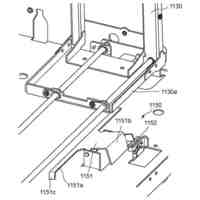
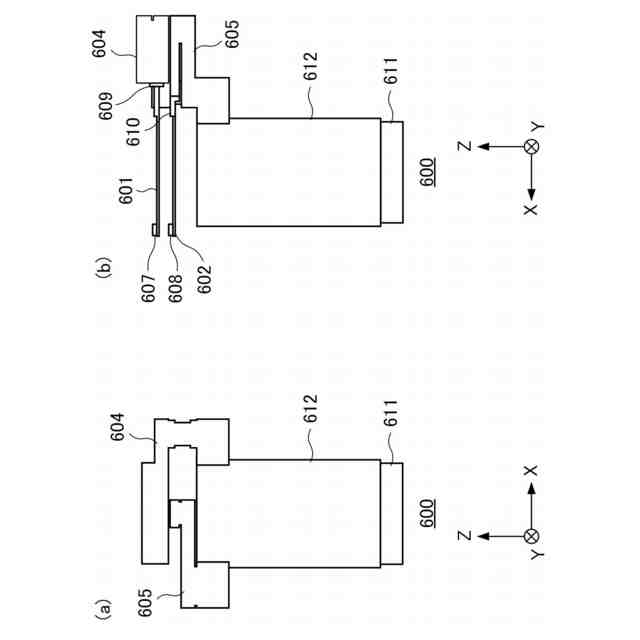
搬送装置の構成例を示す概略図
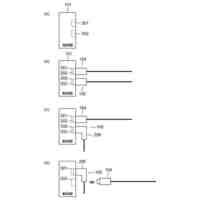
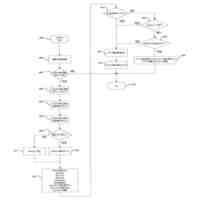
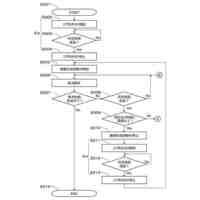
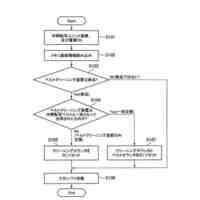
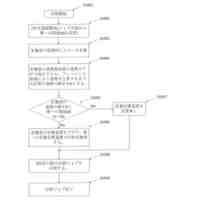
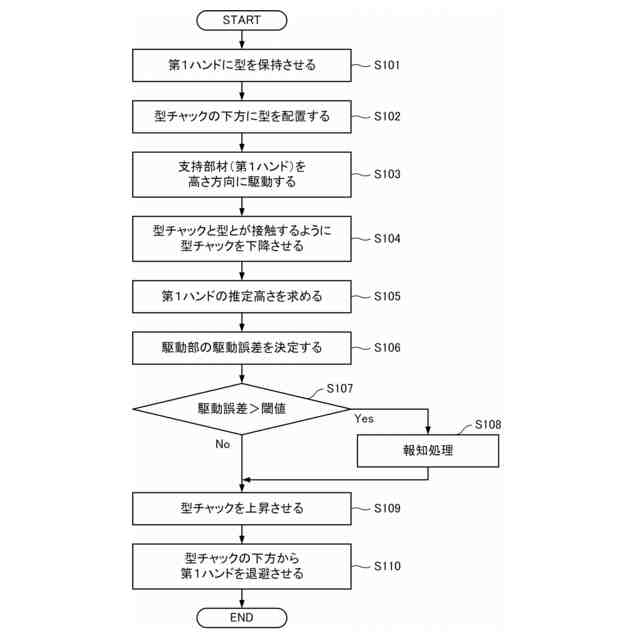
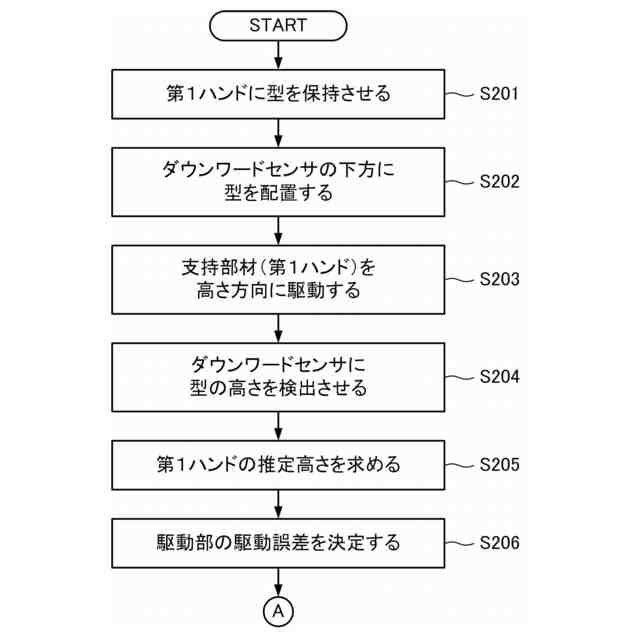
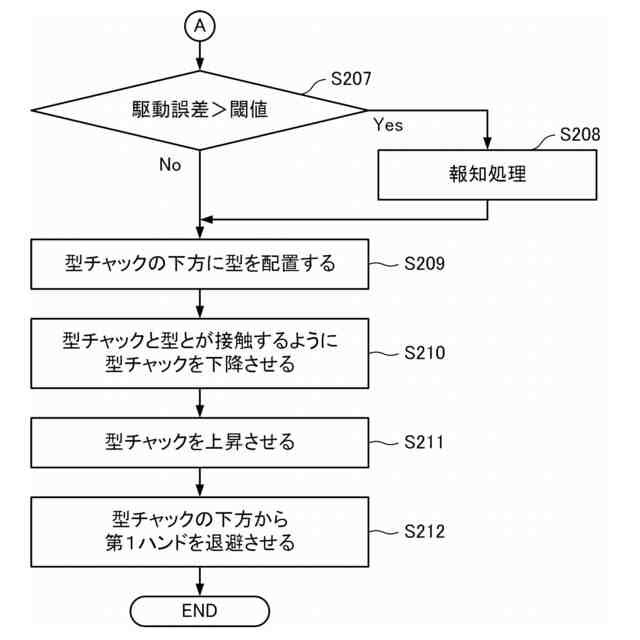
第1実施形態の型搬送処理を示すフローチャート
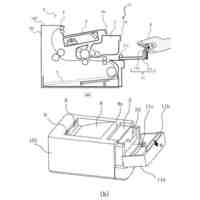
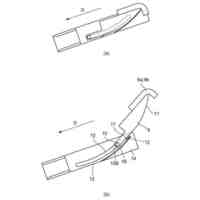
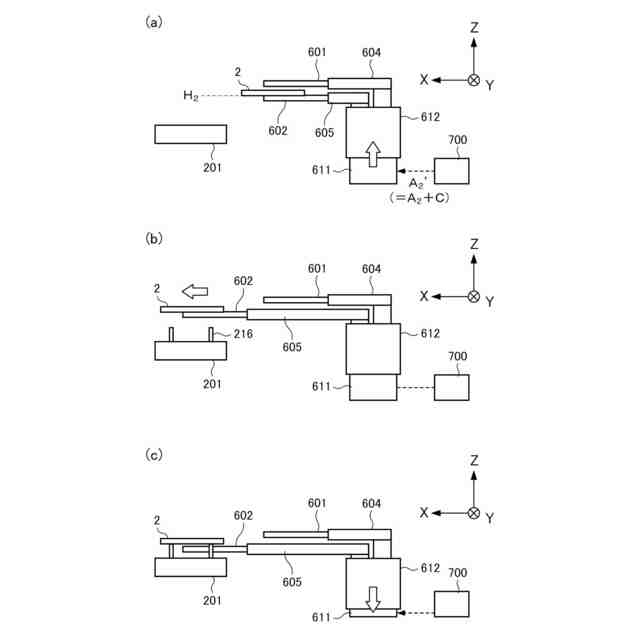
第1実施形態の型搬送処理における搬送装置および平坦化モジュールの動作を説明するための模式図
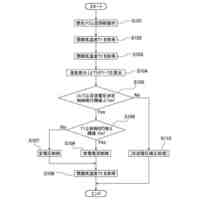
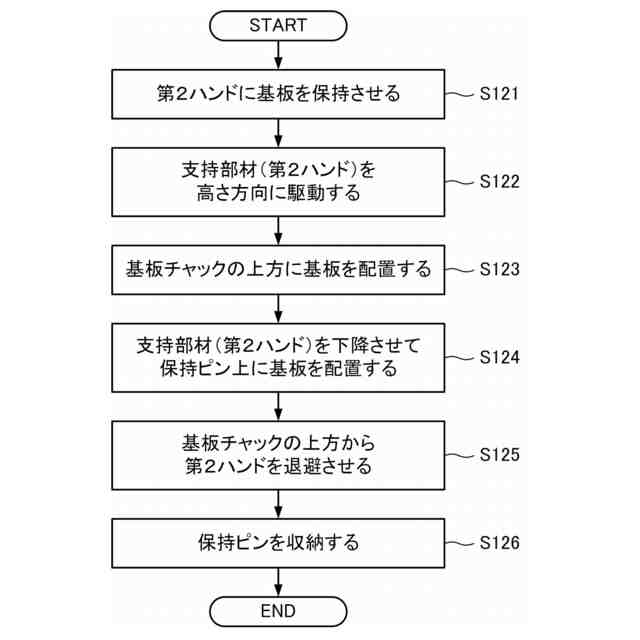
第1実施形態の基板搬送処理を示すフローチャート
第1実施形態の基板搬送処理における搬送装置および平坦化モジュールの動作を説明するための模式図
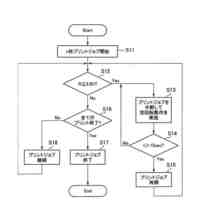
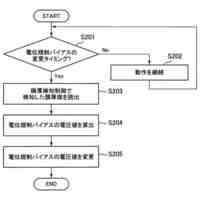
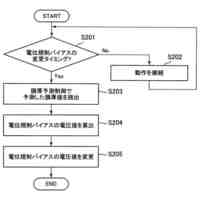
第2実施形態の型搬送処理を示すフローチャート
第2実施形態の型搬送処理を示すフローチャート
第2実施形態の型搬送処理における搬送装置および平坦化モジュールの動作を説明するための模式図
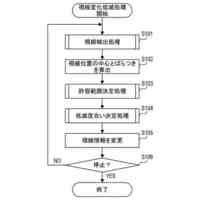
第3実施形態の間隔検出処理を示すフローチャート
第3実施形態の間隔補正処理における搬送装置および平坦化モジュールの動作を説明するための模式図
搬送装置の変形例を示す概略図
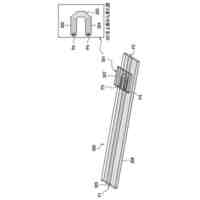
物品の製造方法(インプリント処理)を説明するための図
物品の製造方法(平坦化処理)を説明するための図
【発明を実施するための形態】
【0010】
以下、添付図面を参照して実施形態を詳しく説明する。なお、以下の実施形態は特許請求の範囲に係る発明を限定するものではない。実施形態には複数の特徴が記載されているが、これらの複数の特徴の全てが発明に必須のものとは限らず、また、複数の特徴は任意に組み合わせられてもよい。さらに、添付図面においては、同一若しくは同様の構成に同一の参照番号を付し、重複した説明は省略する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
キヤノン株式会社
撮像装置
7日前
キヤノン株式会社
光学機器
11日前
キヤノン株式会社
撮像装置
5日前
キヤノン株式会社
光学機器
6日前
キヤノン株式会社
撮像装置
10日前
キヤノン株式会社
光学機器
11日前
キヤノン株式会社
情報機器
5日前
キヤノン株式会社
通信装置
11日前
キヤノン株式会社
撮像装置
7日前
キヤノン株式会社
撮像装置
6日前
キヤノン株式会社
画像形成装置
4日前
キヤノン株式会社
光電変換装置
5日前
キヤノン株式会社
画像形成装置
5日前
キヤノン株式会社
画像形成装置
4日前
キヤノン株式会社
細胞剥離装置
4日前
キヤノン株式会社
画像形成装置
4日前
キヤノン株式会社
画像形成装置
4日前
キヤノン株式会社
画像形成装置
10日前
キヤノン株式会社
画像形成装置
4日前
キヤノン株式会社
画像形成装置
5日前
キヤノン株式会社
画像形成装置
5日前
キヤノン株式会社
画像形成装置
10日前
キヤノン株式会社
画像形成装置
10日前
キヤノン株式会社
情報処理装置
10日前
キヤノン株式会社
画像形成装置
10日前
キヤノン株式会社
画像形成装置
10日前
キヤノン株式会社
画像形成装置
4日前
キヤノン株式会社
画像形成装置
4日前
キヤノン株式会社
画像形成装置
4日前
キヤノン株式会社
画像形成装置
4日前
キヤノン株式会社
画像形成装置
6日前
キヤノン株式会社
画像形成装置
4日前
キヤノン株式会社
画像形成装置
11日前
キヤノン株式会社
シート積載装置
5日前
キヤノン株式会社
プリントシステム
4日前
キヤノン株式会社
画像形成制御装置
4日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ