TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025057780
公報種別
公開特許公報(A)
公開日
2025-04-09
出願番号
2023167520
出願日
2023-09-28
発明の名称
ロボットシステム、台、制御方法、物品の製造方法、プログラム、及び記録媒体
出願人
キヤノン株式会社
代理人
弁理士法人近島国際特許事務所
主分類
B25J
13/08 20060101AFI20250402BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ロボットにワークを持ち替えさせるのに有利な技術を提供する。
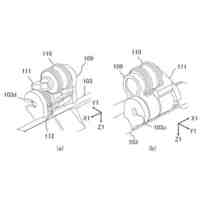
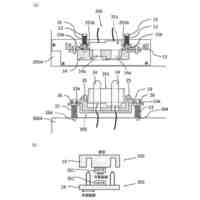
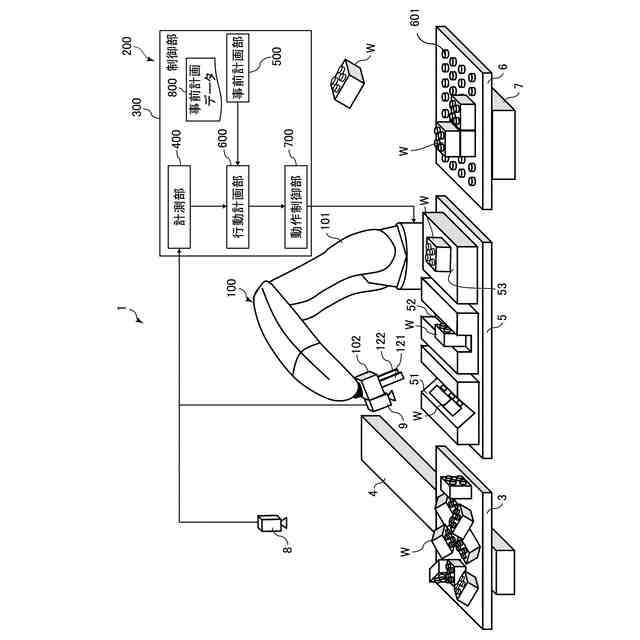
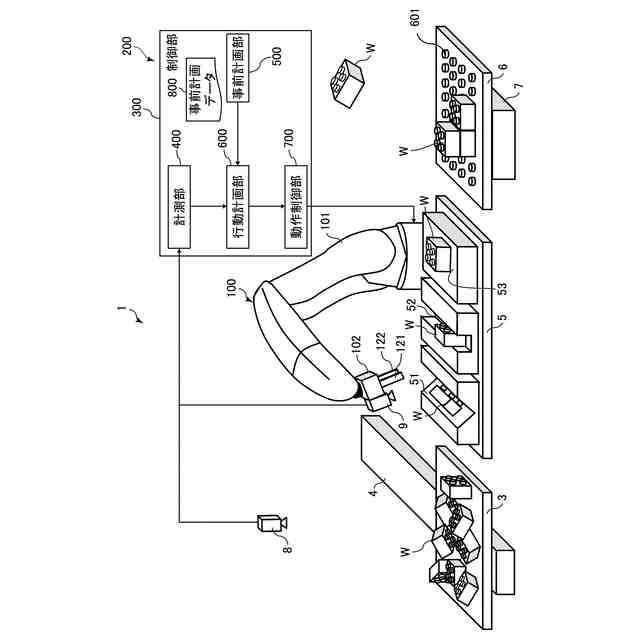
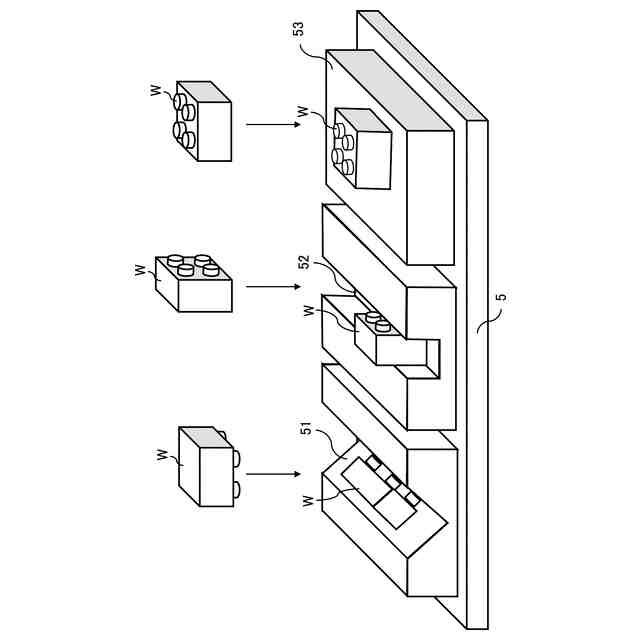
【解決手段】ロボットシステムは、ワークを保持可能なロボットと、前記ワークを互いに異なる姿勢で支持可能な複数の支持部と、前記ロボットを制御する制御部と、を備える。前記制御部は、前記ロボットに前記ワークを保持させる第1処理と、前記複数の支持部から少なくとも1つの支持部を用いて、前記ロボットに前記ワークを持ち替えさせる第2処理と、を実行可能である。
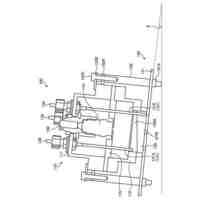
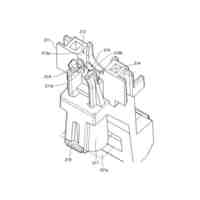
【選択図】図1
特許請求の範囲
【請求項1】
ワークを保持可能なロボットと、
前記ワークを互いに異なる姿勢で支持可能な複数の支持部と、
前記ロボットを制御する制御部と、を備え、
前記制御部は、
前記ロボットに前記ワークを保持させる第1処理と、
前記複数の支持部から少なくとも1つの支持部を用いて、前記ロボットに前記ワークを持ち替えさせる第2処理と、を実行可能である、
ことを特徴とするロボットシステム。
続きを表示(約 1,100 文字)
【請求項2】
前記制御部は、前記第2処理において、前記少なくとも1つの支持部を用いて前記ロボットに前記ワークを持ち替えさせることで、前記ロボットに対するワークの姿勢を変換する、
ことを特徴とする請求項1に記載のロボットシステム。
【請求項3】
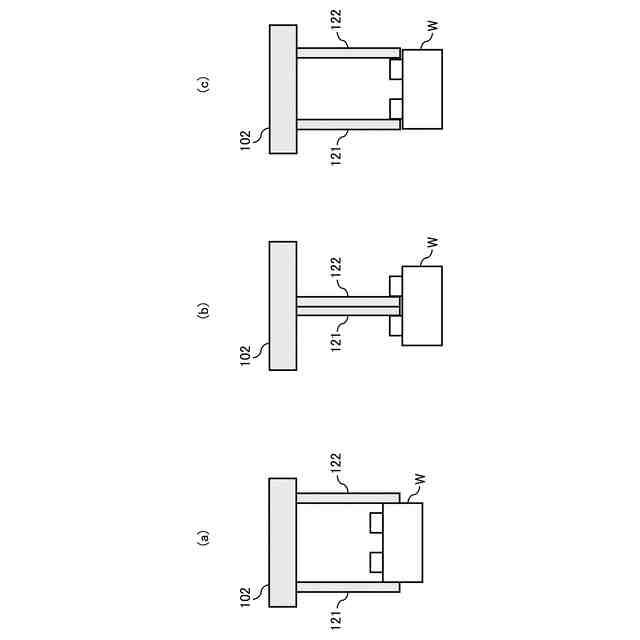
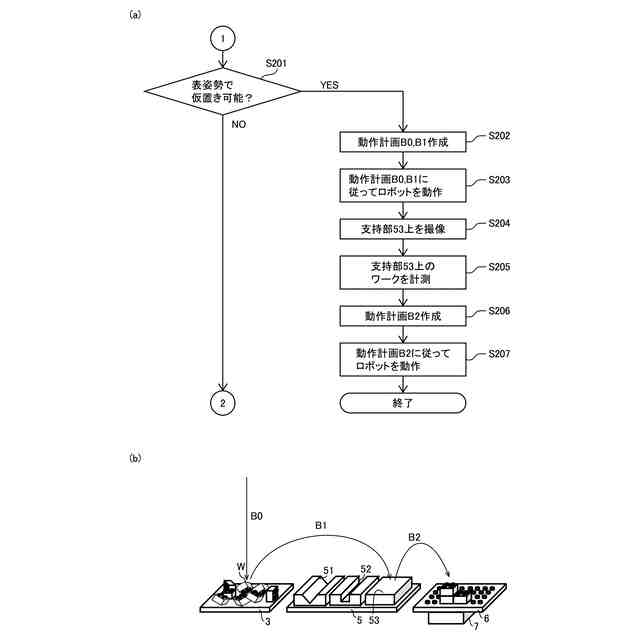
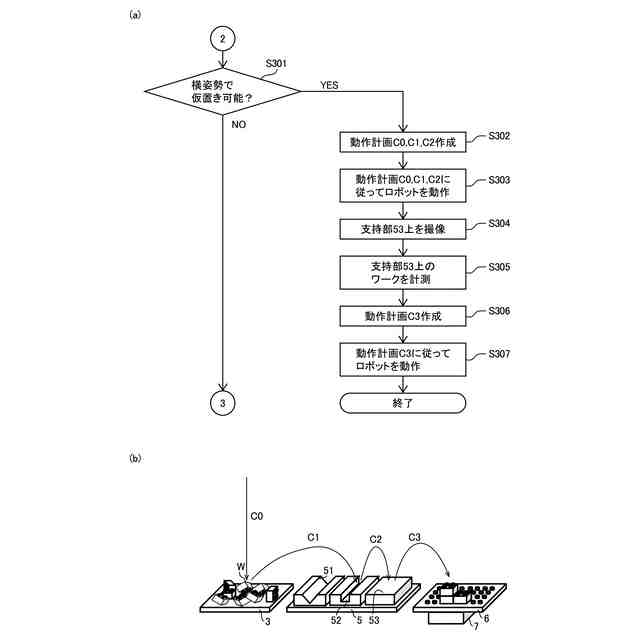
前記制御部は、前記第2処理において、前記少なくとも1つの支持部のうちの1つの支持部において前記ワークを前記ロボットに持ち替えさせる場合、前記ロボットに前記ワークを解放させて前記1つの支持部に前記ワークを支持させ、前記ロボットの姿勢を変更して、前記1つの支持部に支持された前記ワークを再び前記ロボットに保持させる、
ことを特徴とする請求項1に記載のロボットシステム。
【請求項4】
前記複数の支持部の形状が互いに異なる、
ことを特徴とする請求項1に記載のロボットシステム。
【請求項5】
前記複数の支持部の各々は、前記ワークの自重で前記ワークが姿勢決めされる形状である、
ことを特徴とする請求項1に記載のロボットシステム。
【請求項6】
前記ワークが載置される載置部を備え、
前記制御部は、
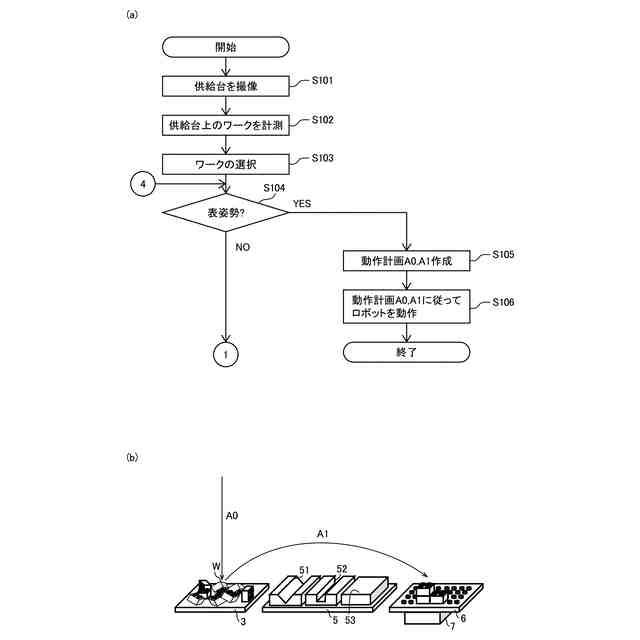
前記第1処理において、前記載置部に載置された前記ワークを、前記ロボットに保持させる、
ことを特徴とする請求項1に記載のロボットシステム。
【請求項7】
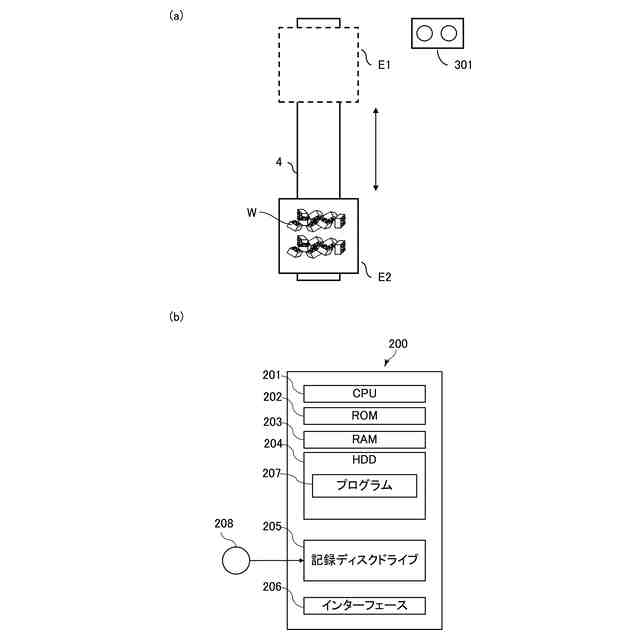
前記載置部に載置された前記ワークの位置及び姿勢の情報を取得するのに用いられるセンサを備え、
前記制御部は、前記センサのセンシング結果に基づいて、前記ワークの位置及び姿勢の情報を取得する、
ことを特徴とする請求項6に記載のロボットシステム。
【請求項8】
前記センサは、カメラを含み、
前記制御部は、前記カメラが前記載置部に載置された前記ワークを撮像した撮像画像に基づいて、前記ワークの位置及び姿勢の情報を取得する、
ことを特徴とする請求項7に記載のロボットシステム。
【請求項9】
前記制御部は、前記ワークの位置及び姿勢に基づいて、前記複数の支持部の中から前記少なくとも1つの支持部を選択する、
ことを特徴とする請求項7に記載のロボットシステム。
【請求項10】
前記制御部は、前記ワークの位置及び姿勢に基づいて、前記少なくとも1つの支持部に仮置きする前記ロボットの動作を計画する、
ことを特徴とする請求項9に記載のロボットシステム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、ロボットの技術に関する。
続きを表示(約 1,100 文字)
【背景技術】
【0002】
バラ積みされた複数の部品を組み立てて物品を製造するロボットシステムが知られている。ロボットシステムを自動化する上で、バラ積み状態の複数の部品の各々を、所望の姿勢に揃える作業が必要となる場合がある。
【0003】
特許文献1には、ロボットが、箱内の部品を手先部でピックアップし、仮姿勢となるように仮置き領域に載置し、仮置き領域に仮姿勢で載置されている部品を、手先部により保持して最終確定姿勢となるように部品載置位置に載置することが開示されている。
【0004】
また、特許文献2には、ロボットが、接触したワークを仮置き台上に移載し、移載された仮置き台上のワークを視覚装置によって撮像して、ワークの位置および方向を検出し、検出されたワークの位置と方向に基づいて、ワークをあらかじめ定められた方向に保持し、ワークを位置決めすることが開示されている。
【先行技術文献】
【特許文献】
【0005】
特開2013-212580号公報
特開平8-243961号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1及び2のいずれにおいても、ロボットが仮置き台にてワークを持ち替えることが記載されているが、箱などに載置されたワークの位置及び姿勢は様々であり、ロボットに保持された状態のロボットに対するワークの保持姿勢も様々である。
【0007】
したがって、様々な姿勢でロボットに保持されるワークが仮置き台に仮置きされるため、仮置き台に仮置きされたワークの位置及び姿勢によっては、ロボットの動作可能な範囲の制約上、ロボットがワークを持ち替える動作が困難な場合もある。
【0008】
本開示は、ロボットにワークを持ち替えさせるのに有利な技術を提供することにある。
【課題を解決するための手段】
【0009】
本開示の第1態様は、ワークを保持可能なロボットと、前記ワークを互いに異なる姿勢で支持可能な複数の支持部と、前記ロボットを制御する制御部と、を備え、前記制御部は、前記ロボットに前記ワークを保持させる第1処理と、前記複数の支持部から少なくとも1つの支持部を用いて、前記ロボットに前記ワークを持ち替えさせる第2処理と、を実行可能である、ことを特徴とするロボットシステムである。
【0010】
本開示の第2態様は、ワークを互いに異なる姿勢で支持可能な複数の支持部を備える、ことを特徴とする台である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
キヤノン株式会社
トナー
1日前
キヤノン株式会社
トナー
1日前
キヤノン株式会社
トナー
1日前
キヤノン株式会社
トナー
1日前
キヤノン株式会社
撮像装置
1日前
キヤノン株式会社
現像装置
4日前
キヤノン株式会社
記録装置
2日前
キヤノン株式会社
培養装置
1日前
キヤノン株式会社
培養装置
1日前
キヤノン株式会社
培養装置
1日前
キヤノン株式会社
光学装置
2日前
キヤノン株式会社
現像装置
4日前
キヤノン株式会社
情報機器
9日前
キヤノン株式会社
定着装置
1日前
キヤノン株式会社
画像表示装置
2日前
キヤノン株式会社
画像形成装置
3日前
キヤノン株式会社
液体吐出装置
2日前
キヤノン株式会社
画像形成装置
3日前
キヤノン株式会社
画像形成装置
3日前
キヤノン株式会社
無線通信装置
3日前
キヤノン株式会社
画像形成装置
1日前
キヤノン株式会社
培養システム
1日前
キヤノン株式会社
画像形成装置
1日前
キヤノン株式会社
画像形成装置
1日前
キヤノン株式会社
画像形成装置
4日前
キヤノン株式会社
画像形成装置
4日前
キヤノン株式会社
細胞剥離装置
8日前
キヤノン株式会社
画像形成装置
8日前
キヤノン株式会社
画像形成装置
8日前
キヤノン株式会社
画像形成装置
3日前
キヤノン株式会社
画像形成装置
8日前
キヤノン株式会社
画像形成装置
8日前
キヤノン株式会社
画像形成装置
9日前
キヤノン株式会社
画像形成装置
8日前
キヤノン株式会社
画像形成装置
8日前
キヤノン株式会社
画像形成装置
8日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ