TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025054597
公報種別
公開特許公報(A)
公開日
2025-04-08
出願番号
2023163721
出願日
2023-09-26
発明の名称
ロボット制御装置、ロボット制御システム、ロボット及びロボット制御方法
出願人
株式会社日立製作所
代理人
ポレール弁理士法人
主分類
B25J
13/00 20060101AFI20250331BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】
ロボットセンサ情報に基づいて、自律動作と自律復旧動作を同時に学習することが可能なロボット制御装置を提供する。
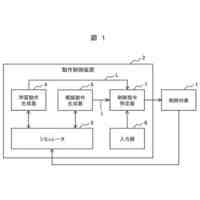
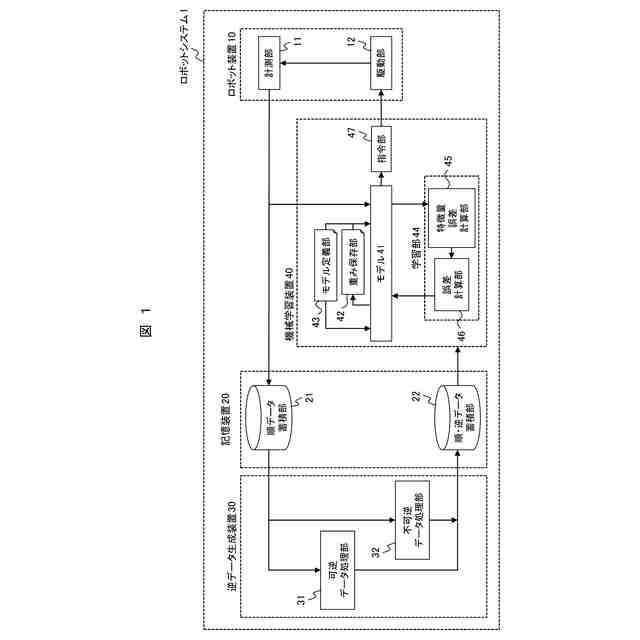
【解決手段】
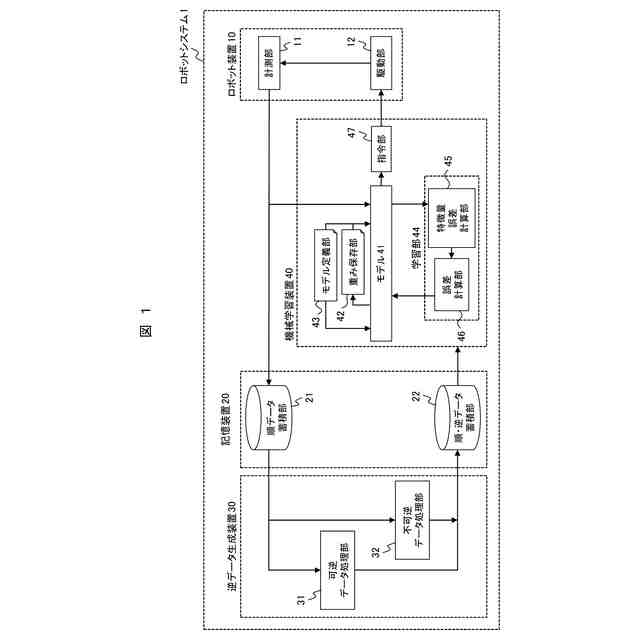
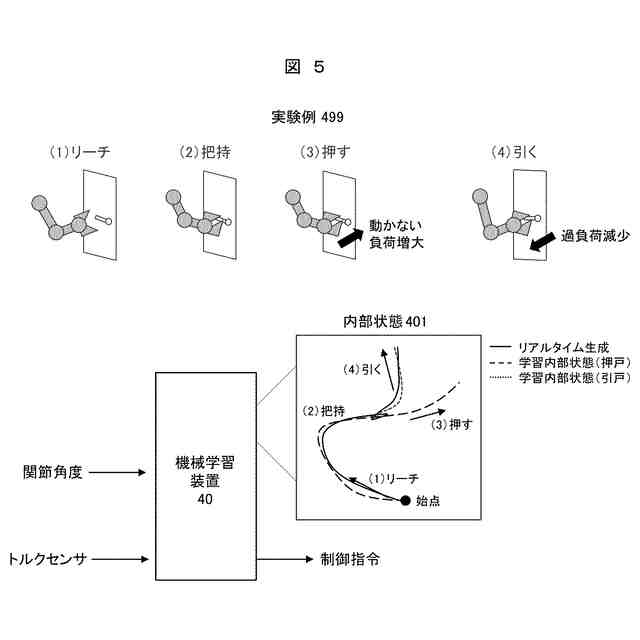
計測したロボットセンサ時系列情報である順データを用いて、その逆時系列データである逆データを生成する逆データ生成装置と、前記順データおよび前記逆データの特徴量を学習し、順方向と逆方向の対応関係を推論する特徴量誤差計算部と、ロボットセンサ情報に基づいて順方向と逆方向のロボット動作を推論する機械学習装置と、ロボットに前記機械学習装置の指令値を出力する指令部と、を備えることを特徴とする。
【選択図】 図1
特許請求の範囲
【請求項1】
計測したロボットセンサ時系列情報である順データを用いて、その逆時系列データである逆データを生成する逆データ生成装置と、
前記順データおよび前記逆データの特徴量を学習し、順方向と逆方向の対応関係を推論する特徴量誤差計算部と、
ロボットセンサ情報に基づいて順方向と逆方向のロボット動作を推論する機械学習装置と、
ロボットに前記機械学習装置の指令値を出力する指令部と、
を備えることを特徴とするロボット制御装置。
続きを表示(約 1,500 文字)
【請求項2】
請求項1に記載のロボット制御装置であって、
前記機械学習装置は、複数の動作経験を学習することで、複雑な作業手順および組み替えを行うことなく自律的に前記順方向と前記逆方向のロボット動作を推論することを特徴とするロボット制御装置。
【請求項3】
請求項1に記載のロボット制御装置であって、
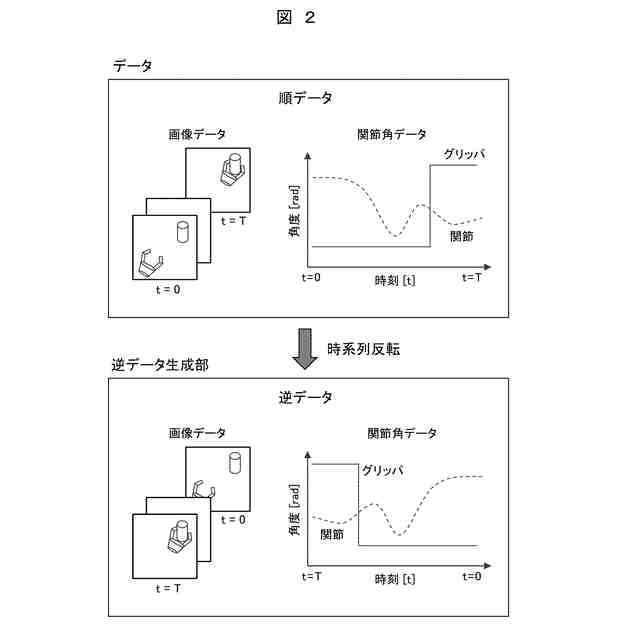
前記逆データ生成装置は、ヒステリシス性を含む前記順データの特性に基づいて、前記ロボットセンサ時系列情報を可逆データと不可逆データに分類し、それぞれの特性に応じた逆データ生成を実施することを特徴とするロボット制御装置。
【請求項4】
請求項1に記載のロボット制御装置であって、
事前に収集した順データから逆データを生成し、順データと逆データの関係を紐づけて記憶する順・逆データ蓄積部を備えることを特徴とするロボット制御装置。
【請求項5】
請求項1に記載のロボット制御装置であって、
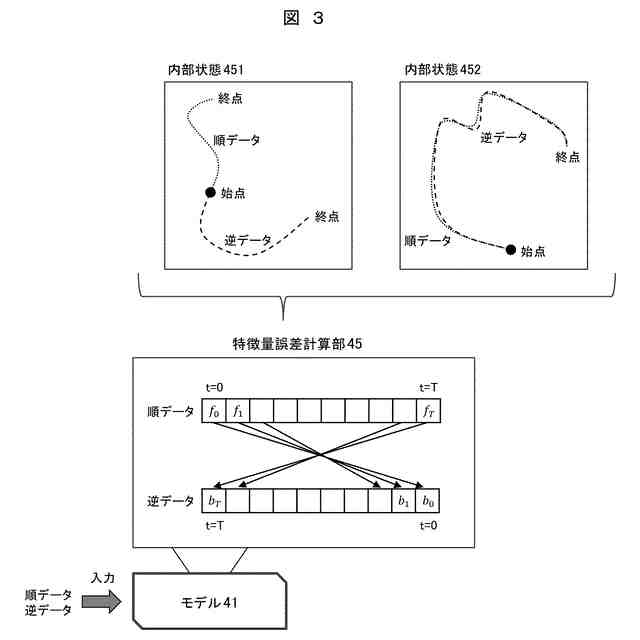
前記特徴量誤差計算部は、前記機械学習装置のモデルの内部状態が順データおよび逆データで一致するように誤差関数に制約を加えることを特徴とするロボット制御装置。
【請求項6】
請求項1に記載のロボット制御装置であって、
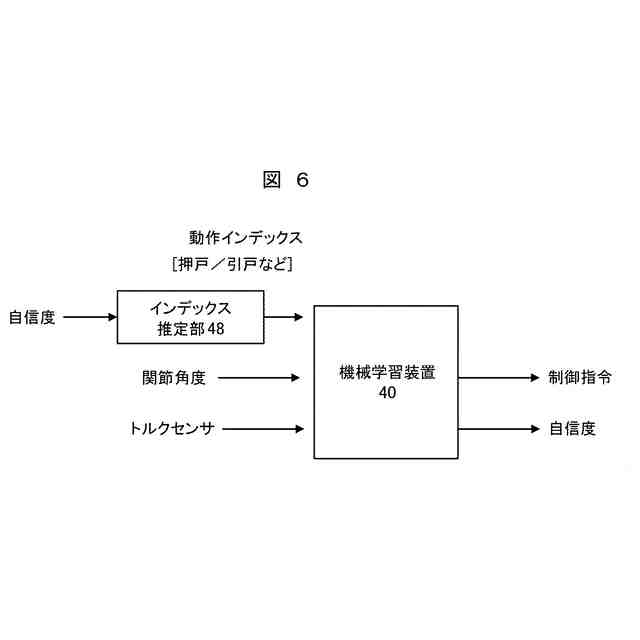
ロボットの作業の自信度を出力し、当該自信度に基づいて動作インデックスを推定するインデックス推定部を備えることを特徴とするロボット制御装置。
【請求項7】
請求項1に記載のロボット制御装置であって、
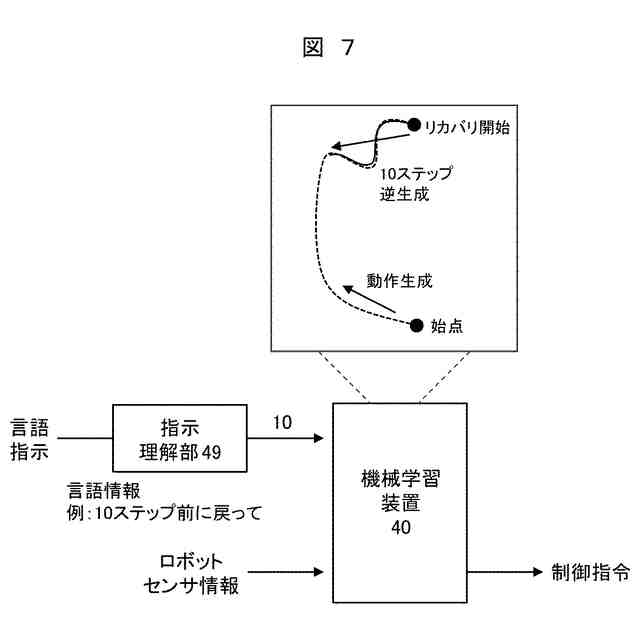
音声および文字を含む抽象指示を理解する指示理解部を備えることを特徴とするロボット制御装置。
【請求項8】
請求項4に記載のロボット制御装置であって、
前記機械学習装置は、ユーザが予め指定したモデルの構造が定義されたモデル定義部と、
モデルの最適パラメータを学習する学習部と、を備え、
前記モデル定義部と、前記順・逆データ蓄積部に蓄積された学習データを用いて、目的関数に従って、前記学習部にてモデルの最適パラメータを学習することを特徴とするロボット制御装置。
【請求項9】
請求項4に記載のロボット制御装置であって、
前記特徴量誤差計算部は、前記順・逆データ蓄積部に蓄積された順データ・逆データのペアを取り出し、モデルに入力することで前記順データと前記逆データの内部表現の対応学習を行うことを特徴とするロボット制御装置。
【請求項10】
ロボットと、
前記ロボットを制御するロボット制御装置と、を備え、
前記ロボットは、
外部環境を計測し、前記ロボット制御装置に送信する計測部と、
前記ロボット制御装置から出力される指令値に基づいて、駆動する駆動部と、を備え、
前記ロボット制御装置は、
前記計測部で計測したロボットセンサ時系列情報である順データを蓄積する順データ蓄積部と、
前記順データを用いて、順データの逆時系列データである逆データを生成する逆データ生成装置と、
前記順データと前記逆データの関係を紐づけて保存する順・逆データ蓄積部と、
前記順データおよび前記逆データの特徴量を学習し、順方向と逆方向の対応関係を推論する特徴量誤差計算部と、
ロボットセンサ情報に基づいて順方向と逆方向のロボット動作を推論する機械学習装置と、
前記ロボットに前記機械学習装置の指令値を出力する指令部と、を備えることを特徴とするロボット制御システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、機械学習を用いて自律的に復旧動作を実行するロボット制御装置、ロボット制御システム、ロボット及びロボット制御方法に適用して有効な技術に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
人の生活環境は、工場などロボットのために環境整備された限定的な環境とは異なり、周囲環境や操作対象、ロボット自体のモデル化に高度な専門知識と膨大な開発コストが必要である。この課題を解決するために、ロボットへの機械学習の応用が進められており、実世界で計測したセンサ情報を学習させることで、環境モデルを精緻に構築することなく、認識と動作生成モデル同時に獲得することが期待される。機械学習により従来技術では実現困難な複雑形状の物体把持、力と手先位置の同時制御が求められる嵌合作業、多様な環境における移動などの単一動作を省コストで獲得可能である。
【0003】
しかし、機械学習は万能ではないため、想定外の状況に対応するために、事前に異常状態を網羅的に検討し、適切な例外処理やフォールトトレラント設計を実装する必要がある。そのため、依然として膨大な開発コストが発生する。また、ロボットシステム稼働中にセンサの異常が検出された際には、生産ラインやロボットを停止し、人が立ち入ってエラー要因を取り除くことを前提にロボットシステムが設計されているため、ロボットシステムの稼働率や持続性低下が課題である。
【0004】
そこで、機械学習を用いて、ロボットが自身と周囲の環境情報からエラーリカバリに必要な動作を学習・実行できれば、ロボットの開発コスト削減と稼働率向上が期待できる。しかし、機械学習を用いたデータ駆動型ロボットシステムは、膨大なデータを学習させることで環境に柔軟な動作(順方向推論)を獲得する反面、復旧動作を実現するための体系的な手法は提案されていない。
【0005】
本技術分野の背景技術として、例えば、特許文献1のような技術がある。特許文献1では、自律作業ロボットで発生した異常状態に対し、機械学習で獲得した学習済みモデルを用いて自己サポート動作の生成もしくは、事前に設定されたリカバリ動作(自律復旧動作)をロボットシステムに指示することで、オペレータによるサポートを低減する構成が開示されている。
【0006】
また、非特許文献1には、順方向と逆方向の推論が可能な機械学習アルゴリズムの一種であり、過去の時系列情報だけでなく、未来の時系列情報も加味することでモデルの予測精度を向上させる技術が開示されている。
【先行技術文献】
【特許文献】
【0007】
特開2022-63707号公報
【非特許文献】
【0008】
Mike Schuster and Kuldip K. Paliwal. “Bidirectional recurrent neural networks.” IEEE Transactions On Signal Processing VOL.45,NO.11 (1997): 2673-2681.
【発明の概要】
【発明が解決しようとする課題】
【0009】
特許文献1は、オペレータによる遠隔操作などのサポート情報を学習することにより自己サポート動作を獲得する。そのため、自己サポート動作生成モデルを獲得するために、動作教示コストとモデルの学習コストが発生する。
【0010】
また、非特許文献1は、過去と未来の時系列情報の両方を入力する必要がある。しかしながら、ロボットは未来情報を取得できないため適用が困難である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社日立製作所
スクリュー圧縮機
3日前
株式会社日立製作所
タスク管理システム
3日前
株式会社日立製作所
位置推定システムおよび方法
3日前
株式会社日立製作所
情報処理装置及び情報処理方法
3日前
株式会社日立製作所
蓄電池の制御方法及び制御装置
3日前
株式会社日立製作所
発想支援システム及び発想支援方法
3日前
株式会社日立製作所
データ処理システム及びデータ処理方法
3日前
株式会社日立製作所
テレイグジスタンスの実施方法およびシステム
3日前
株式会社日立製作所
中継装置、ゲートウェイおよび車載ネットワークシステム
3日前
株式会社日立製作所
ロボット制御システム、ロボット制御方法、およびプログラム
3日前
株式会社日立製作所
動作制御装置、ロボット、動作制御システム並びに動作制御方法
3日前
株式会社日立製作所
システム及びプログラム
3日前
株式会社日立製作所
システム及びプログラム
3日前
株式会社日立製作所
電力系統の周波数安定化装置、周波数安定化方法、および、周波数安定化プログラム
3日前
株式会社日立製作所
地上信号機認識装置及び地上信号機の信号現示認識方法
2日前
川崎重工業株式会社
ハンド
25日前
株式会社アイセイ
搬送装置
1か月前
株式会社不二越
ロボット
17日前
国立大学法人金沢大学
ロボット
1か月前
個人
けがき用治具
19日前
株式会社不二越
ロボット操作装置
16日前
個人
深孔スリーブ駆動ロッド構造
9日前
株式会社ケー・エフ・シー
締結構造
1か月前
川崎重工業株式会社
ロボット
17日前
個人
バール
9日前
工機ホールディングス株式会社
作業機
4日前
川崎重工業株式会社
ロボットシステム
25日前
株式会社黒澤鉄工製作所
けがき用治具
19日前
株式会社デンソー
操縦桿
17日前
梅馨堂合同会社
人協働ロボットシステム
11日前
アピュアン株式会社
衝撃工具
1か月前
株式会社不二越
基板搬送用ロボット
26日前
ARMA株式会社
UI付エンドエフェクタ
12日前
株式会社コスメック
把持装置
1か月前
国立大学法人 東京大学
ロボットアーム
1か月前
株式会社ダイヘン
ロボット制御システム
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ