TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025060417
公報種別
公開特許公報(A)
公開日
2025-04-10
出願番号
2024130872
出願日
2024-08-07
発明の名称
ロボット制御システム、ロボット制御方法、およびプログラム
出願人
株式会社日立製作所
代理人
弁理士法人サンネクスト国際特許事務所
主分類
B25J
19/06 20060101AFI20250403BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】協働ロボットシステムと協働オペレータとの間で高効率の協働作業を実施する革新的な協働ロボティック(即ち、ロボット)システム、ならびに高効率の協働作業を提供する方法を提供する。
【解決手段】協働ロボットデバイスに対して、第1のタスクと関連付けられた複数の候補タスク終了状態を生成することを含む、協働ロボットデバイスを制御するためのシステムおよび方法、方法はさらに、協働ロボットデバイスに対して、複数の候補タスク終了状態から第1のタスク終了状態を選択することと、協働ロボットデバイスが経験した荷重に関する荷重データを受信することと、荷重データに基づいて、複数の候補タスク終了状態から第2のタスク終了状態を選択することとを含んでもよい。
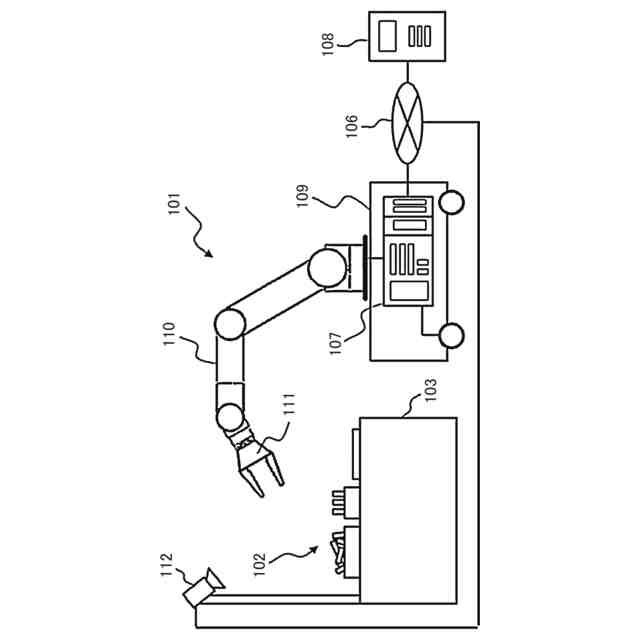
【選択図】図1
特許請求の範囲
【請求項1】
少なくとも1つのメモリと、
前記少なくとも1つのメモリに結合された少なくとも1つのプロセッサと
を備え、前記少なくとも1つのメモリに格納された情報に少なくとも部分的に基づいて、前記少なくとも1つのプロセッサが、個々にまたは任意の組み合わせで、
協働ロボットデバイスに対して、第1のタスクと関連付けられた複数の候補タスク終了状態を生成し、
前記協働ロボットデバイスに対して、前記複数の候補タスク終了状態から第1のタスク終了状態を選択し、
前記協働ロボットデバイスが経験する荷重に関する荷重データを受信し、
前記荷重データに基づいて、前記複数の候補タスク終了状態から第2のタスク終了状態を選択する
ように構成された、制御システム。
続きを表示(約 1,300 文字)
【請求項2】
前記少なくとも1つのプロセッサがさらに、
前記第1のタスクと関連付けられた前記複数の候補タスク終了状態のそれぞれに対するスコアを生成するように構成され、前記第1のタスク終了状態を選択するため、前記少なくとも1つのプロセッサが、最良スコアと関連付けられた前記第1のタスク終了状態を選択するように構成された、
請求項1に記載の制御システム。
【請求項3】
前記少なくとも1つのプロセッサがさらに、
前記荷重データに基づいて、前記第1のタスクと関連付けられた前記複数の候補タスク終了状態のそれぞれに対する更新されたスコアを生成するように構成され、前記第2のタスク終了状態を選択するため、前記少なくとも1つのプロセッサが、最低の更新されたスコアと関連付けられた前記第2のタスク終了状態を選択するように構成された、
請求項2に記載の制御システム。
【請求項4】
前記荷重データが、前記協働ロボットデバイスが経験する前記荷重と関連付けられた大きさデータおよび方向データを含む、請求項3に記載の制御システム。
【請求項5】
前記大きさデータおよび前記方向データが、複数のパターンのうち1つのパターンと関連付けられ、前記複数のパターンがそれぞれ、前記複数の候補タスク終了状態のうち対応する少なくとも1つと関連付けられた少なくとも1つの値と関連付けられ、前記更新されたスコアを生成するため、前記少なくとも1つのプロセッサがさらに、前記1つのパターンと関連付けられた前記少なくとも1つの値に基づいて、前記更新されたスコアを生成するように構成された、請求項4に記載の制御システム。
【請求項6】
前記第1のタスク終了状態が、前記協働ロボットデバイスによって保持された物体を配置するための第1のターゲット位置と関連付けられる、請求項2に記載の制御システム。
【請求項7】
前記第2のタスク終了状態が、前記物体を配置するための第2のターゲット位置と関連付けられる、請求項6に記載の制御システム。
【請求項8】
前記第2のタスク終了状態が、現在位置において前記物体を解放することと関連付けられる、請求項6に記載の制御システム。
【請求項9】
前記少なくとも1つのプロセッサがさらに、
前記複数の候補タスク終了状態と関連付けられたタスクに関連するタスクデータ、または少なくとも作業エリアおよび人間のオペレータに関連する環境データのうち1つもしくは複数を含む、少なくとも1つの入力データセットを受信するように構成された、
請求項1に記載の制御システム。
【請求項10】
前記少なくとも1つのプロセッサがさらに、
前記少なくとも1つの入力データセットの第1の入力データセットに基づいて、前記複数の候補タスク終了状態を生成するように構成された、
請求項9に記載の制御システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、一般的には、協働ロボットシステムを対象とする。
続きを表示(約 4,500 文字)
【背景技術】
【0002】
製造および建設の分野では、多様化する顧客ニーズに応えるために、従来の大量生産方法とは異なる多品種少量生産およびマスカスタマイゼーションが注目を集めている。これらの方法は、多様なニーズを満たすため、生産量およびプロセスを頻繁に調節し変更する必要があり、したがって企業は、かかる状況に対処する複雑な多数のプロセスを扱うことができる人材(多能工)を求めている。他方で、労働力不足が近年、より深刻になってきており、人的資源を確保するのがより困難になっている。したがって、労働力に取って代わる、ロボット、AI、および他のデジタルツールを使用した、より高度な自動化および省力化が必要とされている。
【0003】
ロボットを実際の作業現場に導入する際、現行の技術レベルでロボットが人的作業を完全に引き継ぐことは困難であるが、物体の運搬および他の比較的単純なタスクをロボットが引き継いで、人間がより複雑なタスクに集中するのを可能にする事例がある。これらの事例では、人間とロボットが互いにより緊密に作業することがある。従来、ロボットは、ロボットが動作中のときに人間がロボットに接近するのを防止するため、安全柵に取り囲まれた範囲、つまりエリア内で使用されてきた。しかしながら、近年、協働ロボットがより一般的になってきており、ロボットが安全柵なしで、人間と接触するようになる可能性がある位置で動作する使用例が多くなっている。しかしながら、現在の協働ロボットは、人間と接触したときの怪我を防止する強化された安全機構を有するが、人間と同時に動く協働ロボットの実際の例はほとんどない。実際上、人間と同じ空間で働くロボットシステムはあるが、それらの大部分は人間と順に働くものであり、同じ時間および空間を共有する作業例、例えば、関連する人間の作業者が動くのと同時にロボットが動いて共に作業する例は少ない。
【0004】
ロボットが人間の作業者と協働するとき、特に人間およびロボットが同時に動作するとき、人間は予期しない行動を取ることがある。この場合、既存のロボットは、事前に計画された行動を実行するように構成されていることがあり、ロボットは、協働オペレータが動く間に取る予期しない行動に応答して、自身の行動を変更することはない。したがって、ロボットは協働オペレータの行動に応答せず、ロボットの行動は協働作業には不適切なことがあり、それによって作業が中断され、協働作業の効率が低減されることがある。例えば、協働オペレータが手を伸ばして部品またはツールを取り上げるとき、オペレータの手または腕がロボットの経路内に位置して、ロボットが人間のオペレータと接触することがあり、それによって作業が中断することがある。協働オペレータの身体の位置を測定して、ロボットがロボットの経路内にいるか否かが検出される場合、そしてそれが検出された場合、ロボットの運動は再度計画され、再計画プロセスの間は作業が中断されるため、協働作業の効率が低減される。一部のロボットシステムは、人間の作業者との接触によって停止した後、人間の作業者によって適用される特定の力パターンに基づいて継続する(即ち、新しい動作/タスクを開始する)ようにロボットを構成しているが、かかるシステムは、使いやすくないことがあるか、または停止後に追加の時間を要することがある特定の動作を、人間の作業者が実施する(例えば、特定の力パターンを適用する)必要があるので、協働タスクの効率を低減させることがある。
【0005】
例えば、従来のロボットは、記憶された位置にだけ繰返し移動するので、ロボットデバイスは、作業内容にしたがって位置を指定する運動パターンを使用してタスクを実施するようにされることがある。しかしながら、人間とのかかる協働作業など(特に、多品種少量生産および/またはマスカスタマイゼーション向け)のタスクでは、作業内容が不規則に変わり、作業対象物が固定されていないことがあり、作業対象物が協働する人間の作業者によって操作される際にその位置が頻繁に、つまり常に変化していることがある。具体的には、人間の作業者との協働作業の場合、指定された位置セットへと繰り返し移動することによって、(例えば、事前定義された目標またはタスクと関連付けられた)特定の目的を達成するのが不可能なことがある。したがって、協働ロボットシステムは、ロボットおよび協働オペレータの周りの状況を認識する、カメラまたは距離測定デバイス(例えば、RADARもしくはLIDAR)などの環境測定デバイス、ならびに/あるいは人間とロボットとの接触による外力を検出するセンサを使用し、ロボットおよび協働オペレータの周りの状況、ならびに/あるいは人間とロボットとの接触による力に基づいて、更新された目標またはタスク、およびロボットに対する関連する命令セットを生成できなければならない。しかしながら、一部の以前のロボットシステムは、状況に対する変化の検出、または人間の接触による力の検出があるたびに、ならびに/あるいは動作を再開または継続する前に人間による追加入力に応じて、目標の全体再評価を実施しなければならない。したがって、全体再評価を行うことなく、状況に対する変化の検出または人間の接触による力の検出ごとに応答することができる協働ロボットシステムによって、人間の作業者と協働ロボットシステムとの間のより効率的な協働を可能にすることができる。
【発明の概要】
【0006】
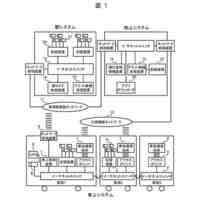
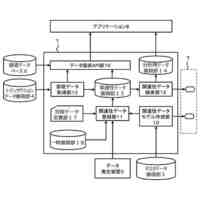
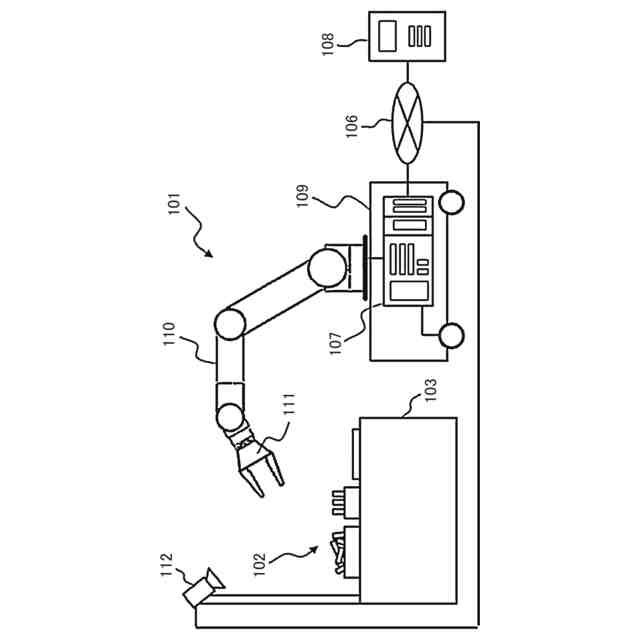
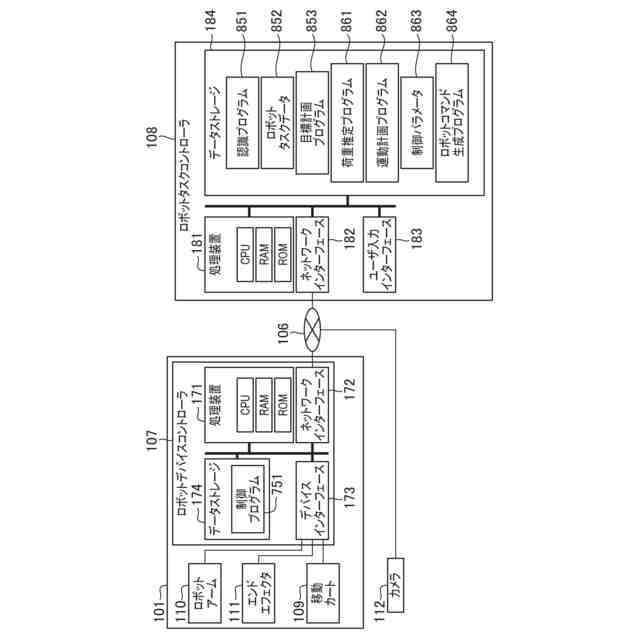
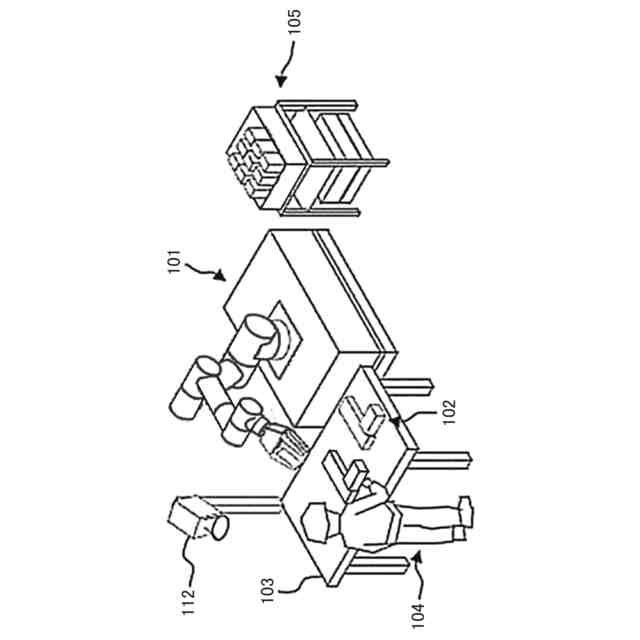
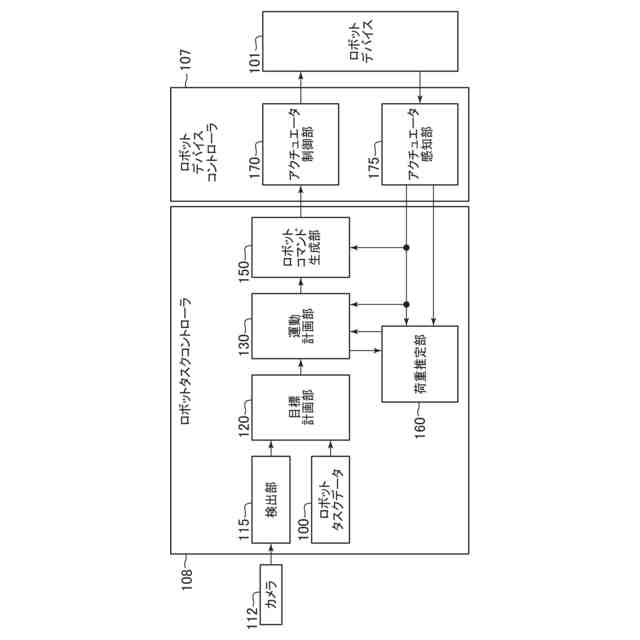
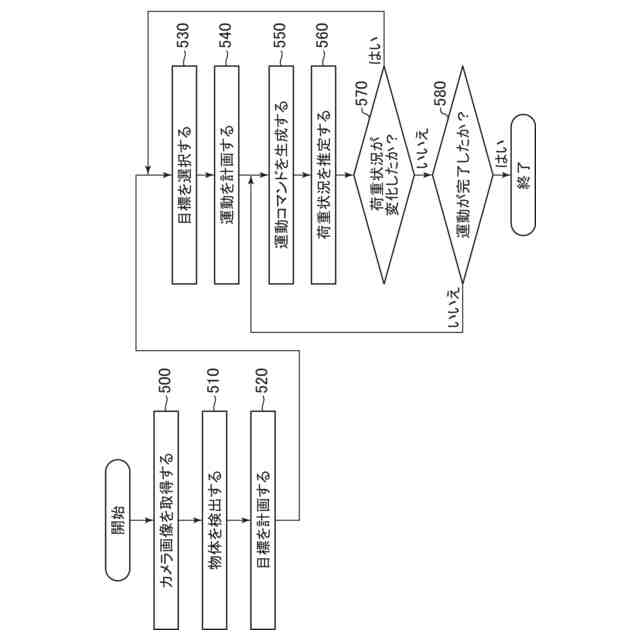
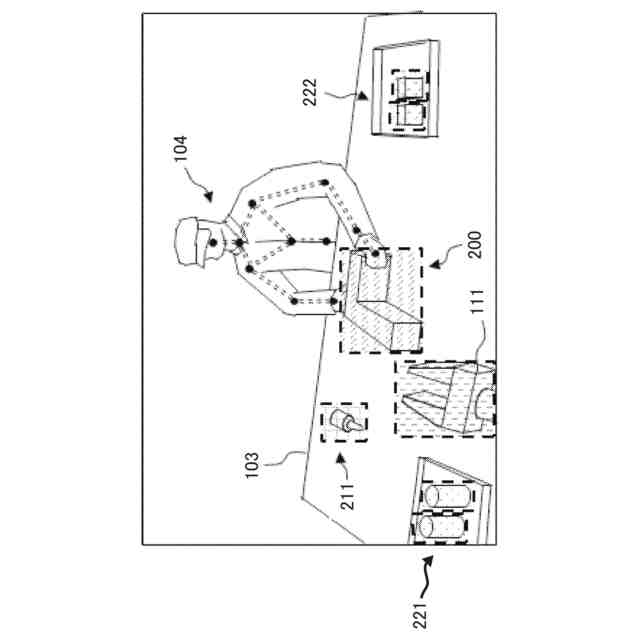
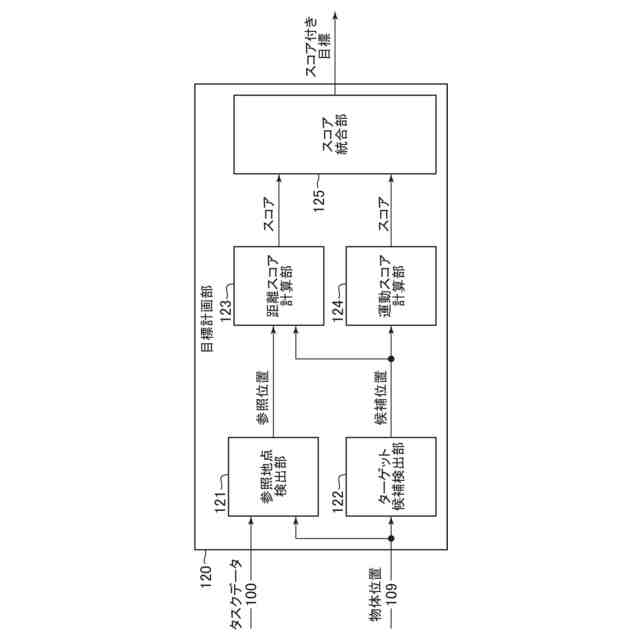
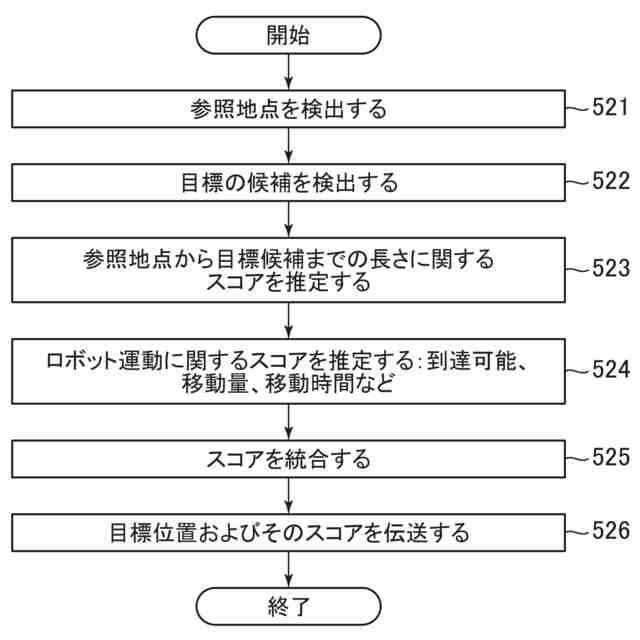
本明細書に記載する例示的実現例は、協働オペレータ(例えば、人間の作業者)の行動に適切に応答し、中断なく協働作業を継続することによって、協働ロボットシステムと協働オペレータとの間で高効率の協働作業を実施する革新的な協働ロボティック(即ち、ロボット)システム、ならびに高効率の協働作業を提供する方法を含む。協働ロボットシステムは、いくつかの態様では、複数のロボットタスクターゲットのうち特定のタスクをロボットが実行する前に、協働ロボットシステムのロボットに対して、複数のロボットタスクターゲット(例えば、1つもしくは複数の作業タスクまたは目的と関連付けられた、タスク目標候補または候補タスク終了状態)を生成する、目標計画モジュールを含んでもよい。協働ロボットシステムはまた、いくつかの態様では、ロボットの荷重状況(例えば、ロボットに加えられる荷重の現在および/または履歴の大きさと方向)を検出する、荷重推定モジュールを含んでもよい。協働ロボットシステムはさらに、いくつかの態様では、ロボットの荷重状況に基づいてロボットタスクターゲットのうち1つを選択し、選択されたロボットタスクターゲットと関連付けられたロボットの運動を計画する、運動計画モジュールを含んでもよい。目標計画モジュールは、いくつかの態様では、予備運動計画中の作業内容にしたがって、複数の候補目標(目標状態)を決定し、各候補目標をスコアリングする。荷重推定モジュールは、選択されたロボットタスクターゲットと関連付けられた運動をロボットが実行する間の、ロボットの荷重状態を検出してもよい。検出された荷重状態に基づいて、運動計画モジュールは、ロボットタスクターゲット選択を更新して、ロボットタスクターゲットを変更するか、あるいは複数のロボットタスクターゲット(例えば、1つもしくは複数の作業タスクまたは目的と関連付けられた候補タスク終了状態)および検出された荷重状態(即ち、状況)に対して計算された、またはそれらと関連付けられたスコアに基づいて、(1つもしくは複数の作業タスクまたは目的と関連付けられた)複数のロボットタスクターゲットのうち1つを選択してもよい。運動計画モジュールは、いくつかの態様では、更新された(新しく選択された)ロボットタスクターゲット選択に対応する運動を実行するための命令セットを生成し、命令セットを協働ロボットシステムのロボットに提供してもよい。
【0007】
本開示の態様は、協働ロボットデバイスに対して、第1のタスクと関連付けられた複数の候補タスク終了状態を生成することを含む、協働ロボットデバイスを制御する方法を含む。方法はさらに、協働ロボットデバイスに対して、複数の候補タスク終了状態から第1のタスク終了状態を選択することと、協働ロボットデバイスが経験する荷重に関する荷重データを受信することと、荷重データに基づいて、複数の候補タスク終了状態から第2のタスク終了状態を選択することとを含んでもよい。
【0008】
本開示の態様は、協働ロボットデバイスに対して、第1のタスクと関連付けられた複数の候補タスク終了状態を生成するための命令を含む、協働ロボットデバイスを制御するための命令を含むことができる、プロセッサによって実行するための命令を格納する、非一時的コンピュータ可読媒体を含む。命令はさらに、協働ロボットデバイスに対して、複数の候補タスク終了状態から第1のタスク終了状態を選択し、協働ロボットデバイスが経験する荷重に関する荷重データを受信し、荷重データに基づいて、複数の候補タスク終了状態から第2のタスク終了状態を選択するための命令を含んでもよい。
【0009】
本開示の態様は、協働ロボットデバイスに対して、第1のタスクと関連付けられた複数の候補タスク終了状態を生成する手段を含む、協働ロボットデバイスを制御する手段を含むことができる、システムを含む。システムはさらに、協働ロボットデバイスに対して、複数の候補タスク終了状態から第1のタスク終了状態を選択する手段と、協働ロボットデバイスが経験する荷重に関する荷重データを受信する手段と、荷重データに基づいて、複数の候補タスク終了状態から第2のタスク終了状態を選択する手段とを含んでもよい。
【0010】
本開示の態様は、メモリと、少なくとも1つのメモリに結合される少なくとも1つのプロセッサとを含むことができる装置を含み、少なくとも1つのメモリに格納された情報に少なくとも部分的に基づいて、少なくとも1つのプロセッサは、個々にまたは任意の組み合わせで、協働ロボットデバイスに対して、第1のタスクと関連付けられた複数の候補タスク終了状態を生成するように構成されてもよい。少なくとも1つのプロセッサはさらに、協働ロボットデバイスに対して、複数の候補タスク終了状態から第1のタスク終了状態を選択し、協働ロボットデバイスが経験する荷重に関する荷重データを受信し、荷重データに基づいて、複数の候補タスク終了状態から第2のタスク終了状態を選択するように構成されてもよい。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社日立製作所
データ処理システム及びデータ処理方法
3日前
株式会社日立製作所
テレイグジスタンスの実施方法およびシステム
3日前
株式会社日立製作所
中継装置、ゲートウェイおよび車載ネットワークシステム
3日前
株式会社日立製作所
ロボット制御システム、ロボット制御方法、およびプログラム
3日前
株式会社日立製作所
動作制御装置、ロボット、動作制御システム並びに動作制御方法
3日前
株式会社日立製作所
システム及びプログラム
3日前
株式会社日立製作所
システム及びプログラム
3日前
株式会社日立製作所
電力系統の周波数安定化装置、周波数安定化方法、および、周波数安定化プログラム
3日前
株式会社日立製作所
地上信号機認識装置及び地上信号機の信号現示認識方法
2日前
川崎重工業株式会社
ハンド
25日前
個人
けがき用治具
19日前
株式会社不二越
ロボット
17日前
株式会社不二越
ロボット操作装置
16日前
個人
深孔スリーブ駆動ロッド構造
9日前
川崎重工業株式会社
ロボット
17日前
個人
バール
9日前
株式会社デンソー
操縦桿
17日前
工機ホールディングス株式会社
作業機
4日前
株式会社黒澤鉄工製作所
けがき用治具
19日前
川崎重工業株式会社
ロボットシステム
25日前
梅馨堂合同会社
人協働ロボットシステム
11日前
ARMA株式会社
UI付エンドエフェクタ
12日前
株式会社不二越
基板搬送用ロボット
26日前
株式会社デンソーウェーブ
ロボット制御システム
2日前
若井ホールディングス株式会社
レンチ構造とその製造方法
19日前
株式会社マキタ
作業機
16日前
学校法人法政大学
装着型アシスト装置
6日前
三菱電機株式会社
トルク締め個所検出システム
9日前
高丸工業株式会社
ロボット操作システムの動作方法
9日前
中国電力株式会社
電動ドライバー
3日前
株式会社不二越
ロボットの教示システム及び教示方法
3日前
シブヤパッケージングシステム株式会社
物品移載装置
17日前
オムロン株式会社
モバイルロボット
3日前
JUKI株式会社
ハンドリング装置
11日前
株式会社ベッセル工業
インパクト工具
17日前
株式会社デンソー
作業装置および作業プログラム
17日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ