TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025060048
公報種別
公開特許公報(A)
公開日
2025-04-10
出願番号
2023170536
出願日
2023-09-29
発明の名称
動作制御装置、ロボット、動作制御システム並びに動作制御方法
出願人
株式会社日立製作所
代理人
ポレール弁理士法人
主分類
B25J
9/22 20060101AFI20250403BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】学習制御器からの制御指令の安全性を保障しつつ、作業の成功率を向上することができる動作制御装置及び動作制御方法を提供する。
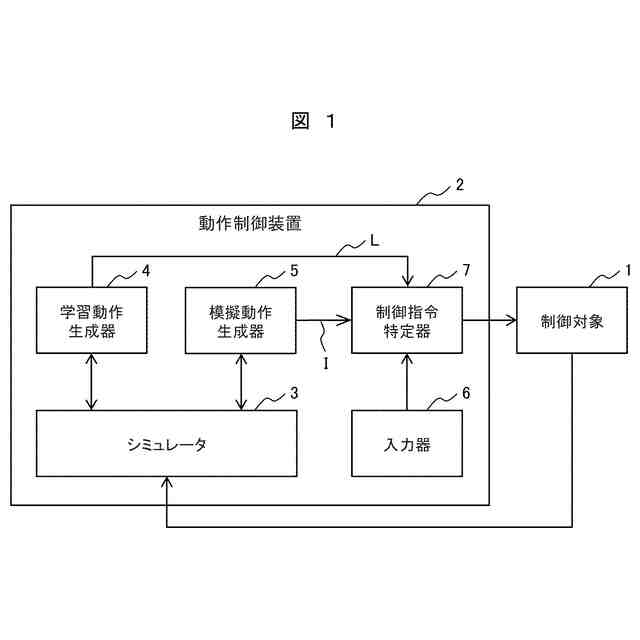
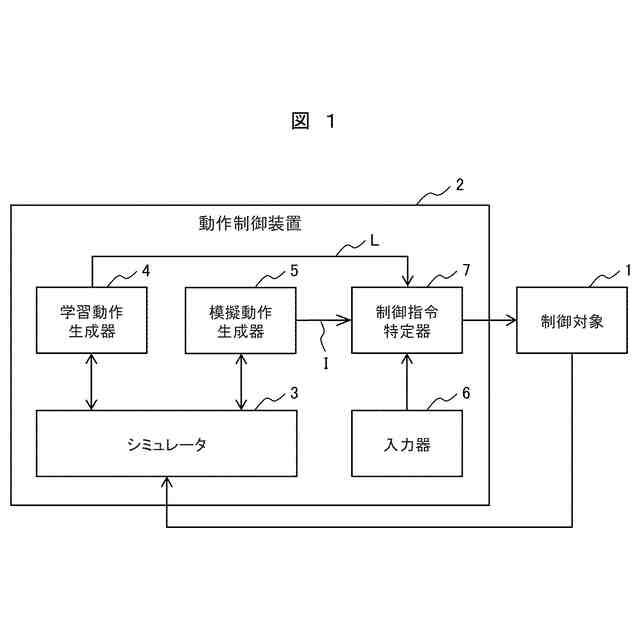
【解決手段】制御対象を制御する動作制御装置であって、制御対象への制御指令を用いて、制御対象の動きを模擬し、制御対象の状態の変化を示す状態遷移情報を作成するシミュレータと、制御対象の動作に対して課される動作制約を入力する入力器と、状態遷移情報を用いて、制御指令と、状態遷移情報との関係を機械学習し、機械学習により求めた学習動作情報を作成する学習動作生成器と、制御指令を変更した変更制御指令をシミュレータに入力し、シミュレータにより作成された、制御指令に対応する状態遷移情報を用いて、模擬動作情報を作成する模擬動作生成器と、学習動作生成器が作成した学習動作情報と模擬動作生成器が生成した模擬動作情報の内、動作制約を満たす動作情報を抽出し、抽出した動作情報に対応する制御指令を特定する制御指令特定器を備えることを特徴とする動作制御装置。
【選択図】図1
特許請求の範囲
【請求項1】
制御対象を制御する動作制御装置であって、
制御対象への制御指令を用いて、前記制御対象の動きを模擬し、前記制御対象の状態の変化を示す状態遷移情報を作成するシミュレータと、前記制御対象の動作に対して課される動作制約を入力する入力器と、前記状態遷移情報を用いて、前記制御指令と、前記状態遷移情報との関係を機械学習し、機械学習により求めた学習動作情報を作成する学習動作生成器と、前記制御指令を変更した変更制御指令を前記シミュレータに入力し、前記シミュレータにより作成された、前記変更制御指令に対応する状態遷移情報を用いて、模擬動作情報を作成する模擬動作生成器と、前記学習動作生成器が作成した前記学習動作情報と前記模擬動作生成器が生成した前記模擬動作情報の内、前記動作制約を満たす動作情報を抽出し、抽出した動作情報に対応する制御指令を特定する制御指令特定器を備えることを特徴とする動作制御装置。
続きを表示(約 1,600 文字)
【請求項2】
請求項1に記載の動作制御装置であって、
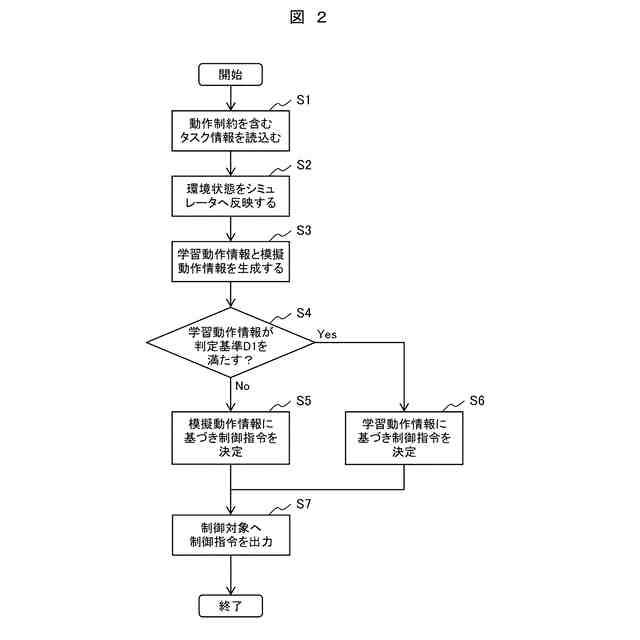
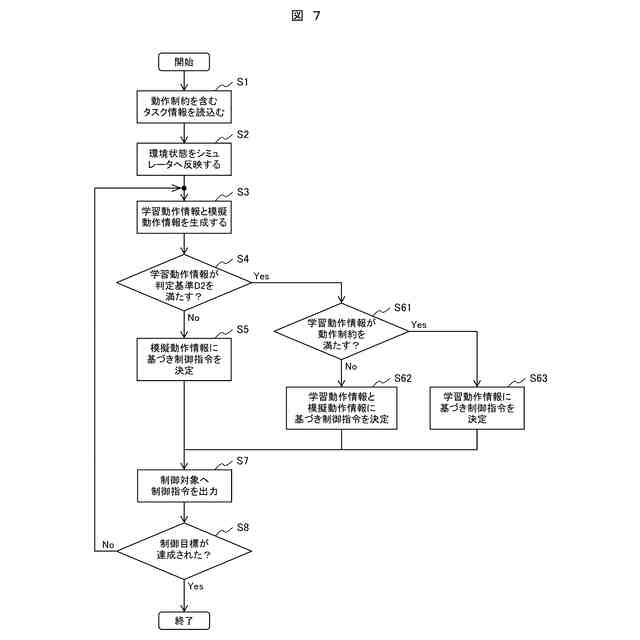
前記制御指令特定器は、前記学習動作情報が前記動作制約を満たし、且つ、前記制御対象へ課される制御目標を達成し得る場合には前記学習動作情報から制御指令を特定し、そうでない場合には前記模擬動作情報から制御指令を特定することを特徴とする動作制御装置。
【請求項3】
請求項1に記載の動作制御装置であって、
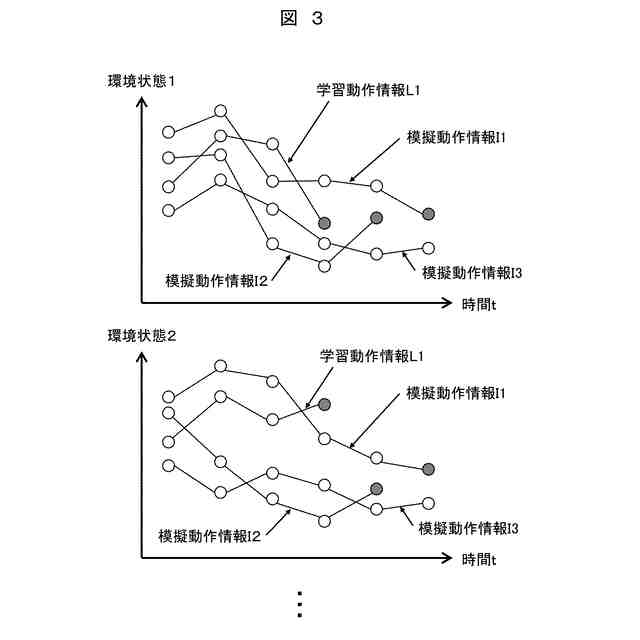
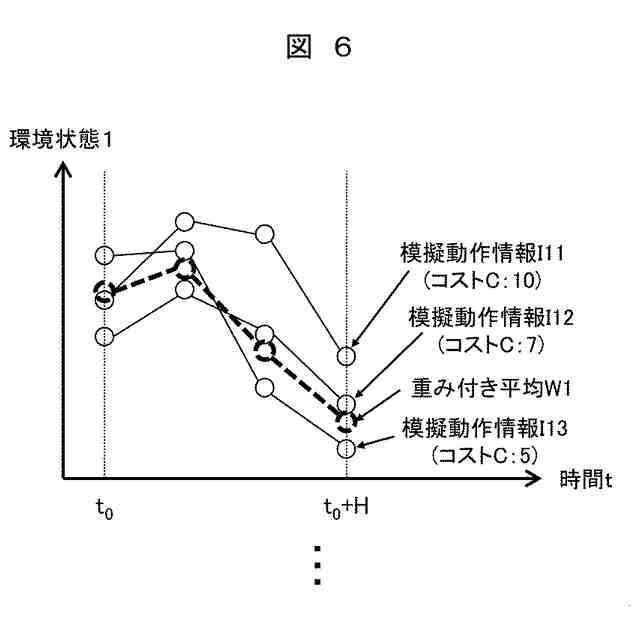
前記模擬動作生成器が複数の模擬動作情報を作成し、前記制御指令特定器は前記複数の模擬動作情報から前記動作制約を満たす制御指令を特定することを特徴とする動作制御装置。
【請求項4】
請求項1に記載の動作制御装置であって、
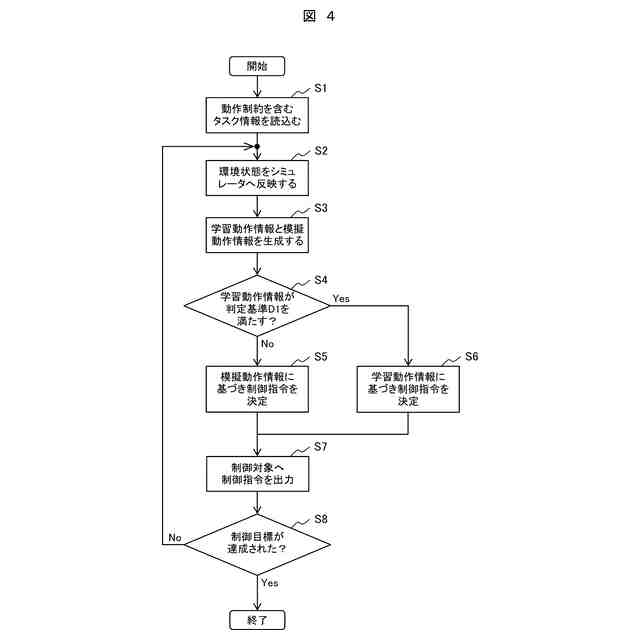
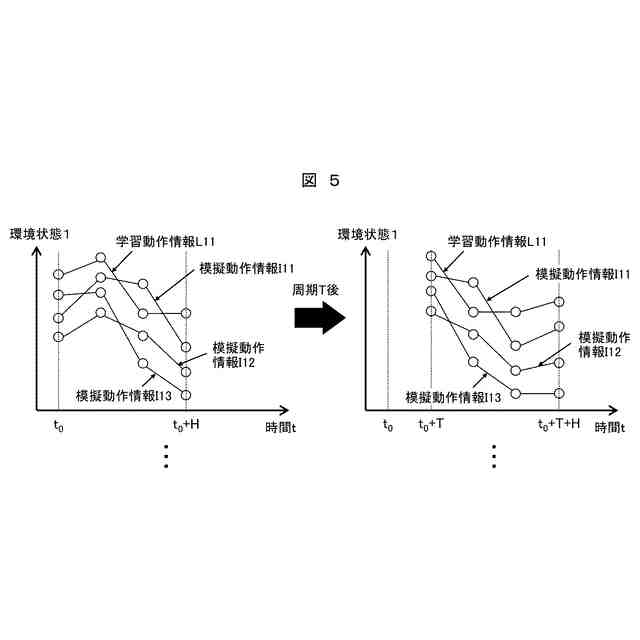
前記シミュレータの前記制御対象の状態がセンサ情報に基づき一定の周期で更新されることを特徴とする動作制御装置。
【請求項5】
請求項1に記載の動作制御装置であって、
前記学習動作生成器は、前記状態遷移情報を用いて、一定時間将来までの前記学習動作情報を作成し、前記変更制御指令を前記シミュレータへ入力し、前記模擬動作生成器は、一定時間将来までの前記模擬動作情報を作成することを特徴とする動作制御装置。
【請求項6】
請求項1に記載の動作制御装置であって、
前記制御指令特定器は、前記学習動作情報が前記動作制約を満たすかを問わず前記制御対象へ課される制御目標を達成し得ない場合には前記模擬動作情報から前記制御指令を特定し、前記動作制約を満たし、且つ、前記制御目標を達成し得る場合には前記学習動作情報から前記制御指令を特定し、前記動作制約を満たさないが、前記制御目標を達成し得る場合には前記模擬動作情報と前記学習動作情報から前記制御指令を特定することを特徴とする動作制御装置。
【請求項7】
計算機を用いて制御対象を制御する動作制御方法であって、
前記計算機は制御対象への制御指令を用いて、前記制御対象の動きを模擬し、前記制御対象の状態の変化を示す状態遷移情報を作成するシミュレータと、前記制御対象の動作に対して課される動作制約を入力する入力器とを備え、
前記計算機により前記状態遷移情報を用いて、前記制御指令と、前記状態遷移情報との関係を機械学習して学習動作情報を作成し、前記制御指令を変更した変更制御指令を前記シミュレータに入力し、前記シミュレータにより作成された、前記変更制御指令に対応する状態遷移情報を用いて、模擬動作情報を作成し、前記学習動作情報と前記模擬動作情報の内、前記動作制約を満たす動作情報を抽出し、抽出した動作情報に対応する制御指令を特定することを特徴とする動作制御方法。
【請求項8】
請求項1に記載の動作制御装置により制御されるロボット。
【請求項9】
ロボットと、ロボットを制御する動作制御装置を含む動作制御システムであって、
動作制御装置は、前記ロボットへの制御指令を用いて、前記ロボットの動きを模擬し、前記ロボットの状態の変化を示す状態遷移情報を作成するシミュレータと、前記ロボットの動作に対して課される動作制約を入力する入力器と、前記状態遷移情報を用いて、前記制御指令と、前記状態遷移情報との関係を機械学習し、機械学習により求めた学習動作情報を作成する学習動作生成器と、前記制御指令を変更した変更制御指令を前記シミュレータに入力し、前記シミュレータにより作成された、前記変更制御指令に対応する状態遷移情報を用いて、模擬動作情報を作成する模擬動作生成器と、前記学習動作生成器が作成した前記学習動作情報と前記模擬動作生成器が生成した前記模擬動作情報の内、前記動作制約を満たす動作情報を抽出し、抽出した動作情報に対応する制御指令を特定する制御指令特定器を備え、前記制御指令特定器が定めた制御指令により前記ロボットを制御することを特徴とする動作制御システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、学習制御の作業成功率と安全性を向上させることができる動作制御装置、ロボット、動作制御システム並びに動作制御方法に関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
近年、少子高齢化に伴う労働力不足や、自然災害による危険区域での作業などが社会課題となっている。それらの解決へ向けて、屋外や人協働空間のような非整備環境での作業が可能なロボットの実現が期待されている。非整備環境における環境状態のばらつき(例えば、形状、位置、物性など)に対するロバストな制御として、機械学習を利用した学習制御の開発が進められている。
【0003】
しかし、学習制御は訓練時に学習していない(学習範囲外の)条件に対する作業の成功率や性能が低い。さらに、そのような条件に対する安全性(例えば、衝突回避、異常姿勢回避など)は保障されておらず、実用化へ向けた障害となっている。
【0004】
特許文献1は、機械学習からの制御指令をシミュレータがシミュレーションし、シミュレーションの実行結果が良好と判定された場合には制御対象に制御指令を出力し、不良と判定された場合には制御対象への制御指令の入力を停止し、その結果を機械学習の訓練データとして与えることで学習する方法を提案している。
【0005】
また、非特許文献1では、学習制御器からの制御指令の将来にわたる安全性をシミュレータにより評価し、安全でない場合には安全に関する制約を満たす動作へ修正する手法を提案している。
【先行技術文献】
【特許文献】
【0006】
特許第6457421号
【非特許文献】
【0007】
K.P.Wabersich and M.N.Zeilinger,”Safe exploration of nonlinear dynamical systems: A predictive safety filter for reinforcement learning,“arXiv:1812.05506v2,2019.
【発明の概要】
【発明が解決しようとする課題】
【0008】
特許文献1は、制御対象への制御指令が不良と判定された場合の安全性を確保できるが、制御が中断されるため作業を継続することができず失敗する。
【0009】
非特許文献1は、制御指令に基づく制御対象の動作が安全でないと判定された場合に安全な動作を継続することはできるが、作業を成功させるための動作を生成できるとは限らず、作業が失敗する可能性が高い。
【0010】
以上のことから本発明においては、学習制御器からの制御指令の安全性を保障しつつ、作業の成功率を向上することができる動作制御装置、ロボット、動作制御システム並びに動作制御方法を提供することを目的とする。
【課題を解決するための手段】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
他の特許を見る
 特許ウォッチ
特許ウォッチ