TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025053908
公報種別
公開特許公報(A)
公開日
2025-04-07
出願番号
2023163024
出願日
2023-09-26
発明の名称
移動通信ネットワークの制御ノード及びコンピュータプログラム
出願人
KDDI株式会社
代理人
弁理士法人大塚国際特許事務所
主分類
H04W
24/02 20090101AFI20250331BHJP(電気通信技術)
要約
【課題】MIMO処理を行うユニットの配置を適切に制御する技術を提供するものである。
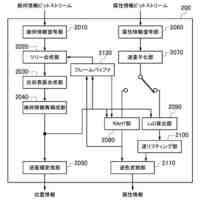
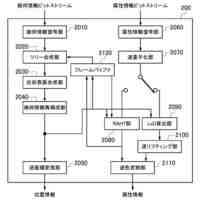
【解決手段】制御ノードは、無線デバイスの速度情報及び数情報を収集する収集手段であって、無線デバイスの速度情報は、当該無線デバイスに関連付けられたユニットと当該無線デバイスに関連付けられた1つ以上のアクセスポイントの内の1つのアクセスポイントとの間の伝送速度を示し、無線デバイスの数情報は、当該無線デバイスに関連付けられた1つ以上のアクセスポイントの数を示す、収集手段と、ユニットを第1計算機群及び第2計算機群の内のどちらに実装するかを、制約条件を満たす様に決定する決定手段と、を備え、制約条件は、伝送路で伝送される信号の合計伝送速度が設定された最大伝送速度を超えないと満たされる第1条件を含む。
【選択図】図6
特許請求の範囲
【請求項1】
複数のアクセスポイントと、
前記複数のアクセスポイントに接続される第1計算機群と、
伝送路を介して前記第1計算機群に接続される第2計算機群と、
を備え、
無線デバイスに前記複数のアクセスポイントの内の1つ以上のアクセスポイントと、仮想化技術により前記第1計算機群又は前記第2計算機群に実装されるユニットと、を関連付け、
無線デバイスと当該無線デバイスに関連付けられた前記ユニットが、当該無線デバイスに関連付けられた前記1つ以上のアクセスポイントを介して通信する無線アクセスネットワークの制御ノードであって、
1つ以上の無線デバイスそれぞれについて、無線デバイスの速度情報及び数情報を収集する収集手段であって、
無線デバイスの前記速度情報は、当該無線デバイスに関連付けられた前記ユニットと当該無線デバイスに関連付けられた前記1つ以上のアクセスポイントの内の1つのアクセスポイントとの間の伝送速度を示し、
無線デバイスの前記数情報は、当該無線デバイスに関連付けられた前記1つ以上のアクセスポイントの数を示す、前記収集手段と、
前記1つ以上の無線デバイスそれぞれに関連付けられた前記ユニットを前記第1計算機群及び前記第2計算機群の内のどちらに実装するかを、制約条件を満たす様に決定する決定手段と、
を備え、
前記制約条件は、前記1つ以上の無線デバイスとの通信のために前記伝送路で伝送される信号の合計伝送速度が前記伝送路に対して設定された最大伝送速度を超えないと満たされる第1条件を含む、制御ノード。
続きを表示(約 1,100 文字)
【請求項2】
前記決定手段は、
無線デバイスに関連付けられた前記ユニットが前記第1計算機群に実装される場合、当該無線デバイスとの通信のために前記伝送路で伝送される信号の伝送速度を、当該無線デバイスの前記速度情報が示す伝送速度に基づき判定し、
無線デバイスに関連付けられた前記ユニットが前記第2計算機群に実装される場合、当該無線デバイスとの通信のために前記伝送路で伝送される信号の伝送速度を、当該無線デバイスの前記速度情報が示す伝送速度と、当該無線デバイスの前記数情報が示す数との積に基づき判定する、請求項1に記載の制御ノード。
【請求項3】
前記決定手段は、前記1つ以上の無線デバイスそれぞれについて、無線デバイスに関連付ける前記1つ以上のアクセスポイントの数の上限値を、前記第1条件を満たす様に決定する、請求項1に記載の制御ノード。
【請求項4】
前記ユニットは、前記1つ以上の無線デバイスそれぞれについて前記決定手段が決定した前記上限値に従い前記1つ以上の無線デバイスそれぞれに関連づける前記1つ以上のアクセスポイントを決定する、請求項3に記載の制御ノード。
【請求項5】
前記無線アクセスネットワークは、前記1つ以上の無線デバイスそれぞれについて前記決定手段が決定した前記上限値に従い前記1つ以上の無線デバイスそれぞれ関連づける前記1つ以上のアクセスポイントを決定する第1ノードを有する、請求項3に記載の制御ノード。
【請求項6】
前記第1ノードは、ニアリアルタイムRANインテリジェントコントローラである、請求項5に記載の制御ノード。
【請求項7】
前記収集手段は、前記速度情報及び前記数情報を、前記第1ノードから収集する、請求項5に記載の制御ノード。
【請求項8】
前記収集手段は、前記速度情報及び前記数情報を、前記第1計算機群及び前記第2計算機群から収集する、請求項1に記載の制御ノード。
【請求項9】
前記決定手段の決定に従い、前記第1計算機群及び前記第2計算機群を制御して前記ユニットを前記第1計算機群及び前記第2計算機群に実装する制御手段をさらに備えている、請求項1に記載の制御ノード。
【請求項10】
前記制約条件は、前記第1計算機群に配置される前記ユニットに必要な計算機リソースが、前記第1計算機群において前記ユニットのために利用可能な計算機リソースを超えないと満たされる第2条件を含む、請求項1に記載の制御ノード。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、移動通信ネットワークの無線アクセスネットワーク(RAN)の制御技術に関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
移動通信ネットワークのRANは、中央ユニット(CU)と、分散ユニット(DU)と、無線ユニット(RU)等により構成される。RUは、無線デバイス(WD)と無線信号を送受信する機能を有する。DUは、媒体アクセス制御(MAC)レイヤや、無線リンク制御(RLC)レイヤ等の処理を行う。CUは、パケットデータコンバージェンスプロトコル(PDCP)レイヤ等のDUが処理するレイヤより高次のレイヤの処理を行う。
【0003】
RUは、移動通信ネットワークによってサービス提供される地理的領域をカバーするため、当該地理的領域において分散して配置される。一方、DUやCUは、RUよりも少ない数の通信局舎に配置される。一般的に、通信局舎は、地理的に分散して配置された複数のRUを収容する"エッジサイト"と、複数のエッジサイトを収容する"セントラルサイト"とに分類される。特許文献1は、DU及びCUのエッジサイト及びセントラルサイトへの様々な配置パターンを開示している。
【0004】
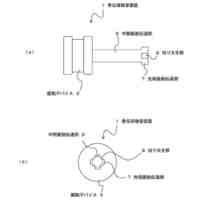
また、特許文献2は、コヒーレントな干渉抑制技術である、セルフリー・マッシブ・MIMO(CF-mMIMO)技術を開示している。CF-mMIMOにおいては、WDと無線信号を送受信する機能、つまり、上記のRUに相当する機能はアクセスポイント(AP)と呼ばれる。したがって、以下の説明では、APとの用語を使用する。CF-mMIMOとは、1つのWDとの通信において複数のAPを使用してMIMO通信を行う通信技術である。CF-mMIMOにおいては、1つのWDとの通信において使用する1つ以上のAPが選択される。この1つのWDとの通信において使用する1つ以上のAPの集合(セット)は、当該WDに関連付けられた"クラスタ"又は当該WDの"クラスタ"と呼ばれる。
【0005】
下り方向において、DUは、CUから受信した1つのWD宛の信号に基づき、当該WDに関連付けられたクラスタの各APに送信する信号を生成する。各APに送信する信号の生成には、WDと、当該WDに関連付けられたクラスタの各APとの間の下り方向のチャネル特性が使用される。WDに関連付けられたクラスタの各APは、DUから受信する信号に基づき無線信号を送信する。WDは、当該WDに関連付けられたクラスタの各APから受信する無線信号に基づきDUがCUから受信した信号を判定する。同様に、上り方向において、WDが送信した無線信号は、当該WDに関連付けられたクラスタの各APが受信してDUに送信する。DUは、WDに関連付けられたクラスタの各APから受信する信号に基づき当該WDが送信した信号を判定する。なお、この判定においては、当該WDと、当該WDに関連付けられたクラスタの各APとの間の上り方向のチャネル特性が使用される。この様に、CF-mMIMOにおいて、DUはMIMO処理を行うユニットである。
【0006】
なお、特許文献2は、WDのクラスタに含めるAPを動的に制御する構成を開示している。
【先行技術文献】
【特許文献】
【0007】
特開2020-136787号公報
特開2023-81600号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
ネットワークの仮想化技術により、CU及びDUは専用のハードウェアではなく、汎用の計算機(コンピュータ)に適切なプログラムを実行させることで実現され得る。この様な場合、エッジサイトやセントラルサイトには1つ以上の計算機(以下、計算機群又は計算機セットと表記する。)を配置して、各計算機群において、CU及びDUを仮想的に実現する。
【0009】
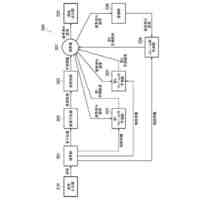
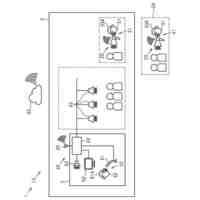
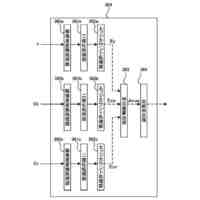
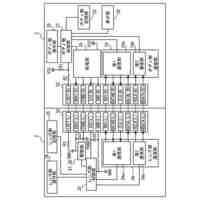
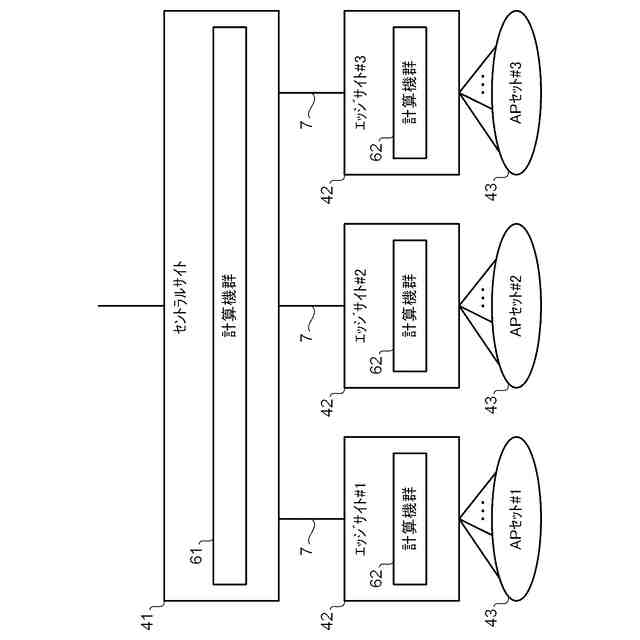
図1は、ネットワークの仮想化技術を使用する場合のRANの構成を示している。セントラルサイト41には計算機群61が配置され、エッジサイト42には計算機群62が配置される。セントラルサイト41の計算機群61は、複数のエッジサイト42の計算機群62それぞれと伝送路7で接続される。伝送路7は、有線伝送路であっても無線伝送路であっても良い。なお、図1において、1つのセントラルサイト41が収容するエッジサイト42の数を3としているが例示であり、1つのセントラルサイト41が収容するエッジサイト42の数は2以上の任意の数であり得る。以下の説明において、3つのエッジサイト42を区別する場合には、図1に示す様に、エッジサイト#1、エッジサイト#2、エッジサイト#3と表記する。
【0010】
各エッジサイト42の計算機群62は、複数のAPそれぞれと有線伝送路又は無線伝送路により接続される。なお、以下の説明において、1つの計算機群62に接続される複数のAPを総称してAPセット43と表記する。図1に示す様に、各エッジサイト42の計算機群62は、1つのAPセット43の各APに接続される。なお、以下の説明において、3つのAPセット43を区別する場合には、図1に示す様に、APセット#1、APセット#2、APセット#3と表記する。図1において、APセット#1は、エッジサイト#1に収容され、APセット#2は、エッジサイト#2に収容され、APセット#3は、エッジサイト#3に収容されている。なお、APセット43に含まれるAPの数は、APセット43毎に異なり得る。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
KDDI株式会社
点群復号装置、点群復号方法及びプログラム
1日前
KDDI株式会社
点群復号装置、点群復号方法及びプログラム
1日前
KDDI株式会社
点群復号装置、点群復号方法及びプログラム
1日前
KDDI株式会社
画像復号装置、画像復号方法及びプログラム
2日前
KDDI株式会社
物体光補正装置、物体光補正方法及びプログラム
1日前
KDDI株式会社
メッシュ復号装置、メッシュ復号方法及びプログラム
1日前
KDDI株式会社
メッシュ復号装置、メッシュ復号方法及びプログラム
1日前
KDDI株式会社
メッシュ復号装置、メッシュ復号方法及びプログラム
1日前
KDDI株式会社
メッシュ復号装置、メッシュ復号方法及びプログラム
1日前
KDDI株式会社
メッシュ復号装置、メッシュ復号方法及びプログラム
1日前
KDDI株式会社
メッシュ復号装置、メッシュ復号方法及びプログラム
3日前
KDDI株式会社
メッシュ復号装置、メッシュ復号方法及びプログラム
3日前
KDDI株式会社
情報処理装置、情報処理方法及び情報処理システム
8日前
個人
音声による制御装置
1か月前
個人
防犯AIプラグイン
14日前
個人
コメント配信システム
28日前
個人
テレビ会議拡張システム
9日前
個人
電気音響変換装置
24日前
株式会社SEtech
撮像装置
28日前
キヤノン株式会社
撮像装置
1か月前
日本放送協会
無線通信装置
14日前
個人
無線中継赤外線コピーリモコン
11日前
TOA株式会社
音響システム
10日前
キヤノン電子株式会社
画像処理装置
1か月前
キヤノン電子株式会社
画像処理装置
21日前
キヤノン電子株式会社
画像処理装置
15日前
キヤノン電子株式会社
画像読取装置
4日前
キヤノン株式会社
画像読取装置
1日前
キヤノン株式会社
画像読取装置
1か月前
個人
電子透かし埋め込み及び抽出方法
1か月前
日本無線株式会社
無線受信装置
1か月前
BoCo株式会社
骨伝導聴音装置
1か月前
船井電機株式会社
表示装置
1か月前
株式会社ニコン
カメラボディ
1日前
株式会社ニコン
撮像装置
9日前
理想科学工業株式会社
連絡システム
9日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ