TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025049814
公報種別
公開特許公報(A)
公開日
2025-04-04
出願番号
2023158265
出願日
2023-09-22
発明の名称
情報処理装置、情報処理方法及びプログラム
出願人
カシオ計算機株式会社
代理人
弁理士法人光陽国際特許事務所
主分類
G06T
7/70 20170101AFI20250327BHJP(計算;計数)
要約
【課題】自己位置の測位において、高精度の測位結果を提供する。
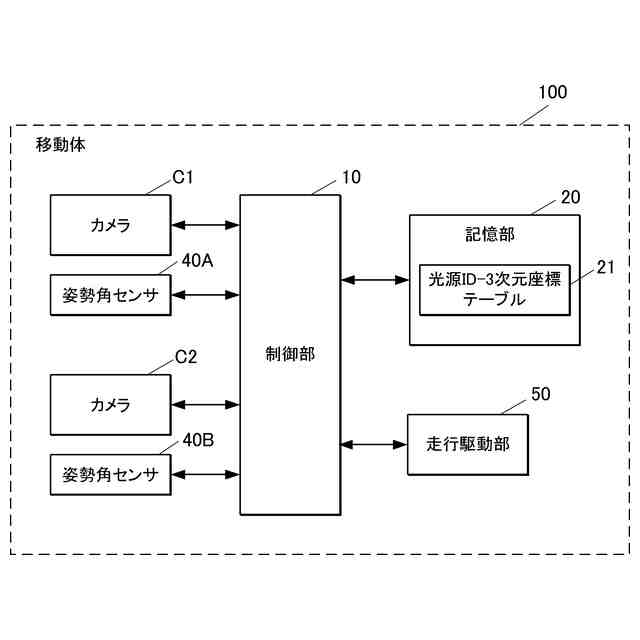
【解決手段】情報処理装置は、3次元空間における座標位置が既知である複数の光源(位置指標)のうち、撮像装置(カメラ)により撮像された画像に含まれる光源の画像内の座標位置を取得し、画像に含まれる光源の3次元空間における座標位置及び画像内の座標位置に基づいて、3次元空間における自装置(移動体)の座標位置及び方位の少なくとも一方を導出する測位処理を行う。情報処理装置は、撮像装置からの所定方向への光源の角度又は光源間の水平方向の見込み角が所定の条件を満たす光源の情報を使用して、自装置の座標位置及び方位の少なくとも一方を導出する。
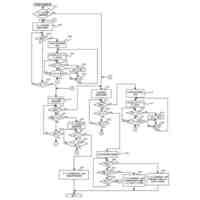
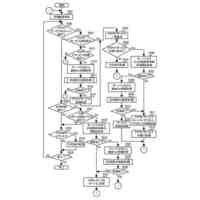
【選択図】図17
特許請求の範囲
【請求項1】
3次元空間における座標位置が既知である複数の光源のうち、撮像装置により撮像された画像に含まれる光源の画像内の座標位置を取得し、
前記画像に含まれる光源の前記3次元空間における座標位置及び前記画像内の座標位置に基づいて、前記3次元空間における自装置の座標位置及び方位の少なくとも一方を導出する測位処理を行う制御部を備え、
前記制御部は、前記撮像装置からの所定方向への光源の角度又は光源間の水平方向の見込み角が所定の条件を満たす光源の情報を使用して、前記自装置の座標位置及び方位の少なくとも一方を導出する情報処理装置。
続きを表示(約 2,700 文字)
【請求項2】
前記制御部は、前記撮像装置からの所定方向への光源の角度が第1閾値以上の光源を含む複数の光源の組み合わせ、又は、光源間の水平方向の見込み角が所定の条件を満たす複数の光源の組み合わせとなる複数の光源の情報を使用して、前記自装置の座標位置及び方位の少なくとも一方を導出する請求項1に記載の情報処理装置。
【請求項3】
前記制御部は、前記画像に含まれる、前記撮像装置からの仰俯角が前記第1閾値以上である第1光源と、第2の光源の情報を使用して、前記自装置の座標位置及び方位の少なくとも一方を導出する請求項2に記載の情報処理装置。
【請求項4】
前記制御部は、前記画像に含まれる、前記撮像装置からの仰俯角が前記第1閾値以上である第1光源と、当該第1光源との間の水平方向の見込み角が第2閾値以上である第2光源と、の情報を使用して、前記自装置の座標位置及び方位の少なくとも一方を導出する請求項2に記載の情報処理装置。
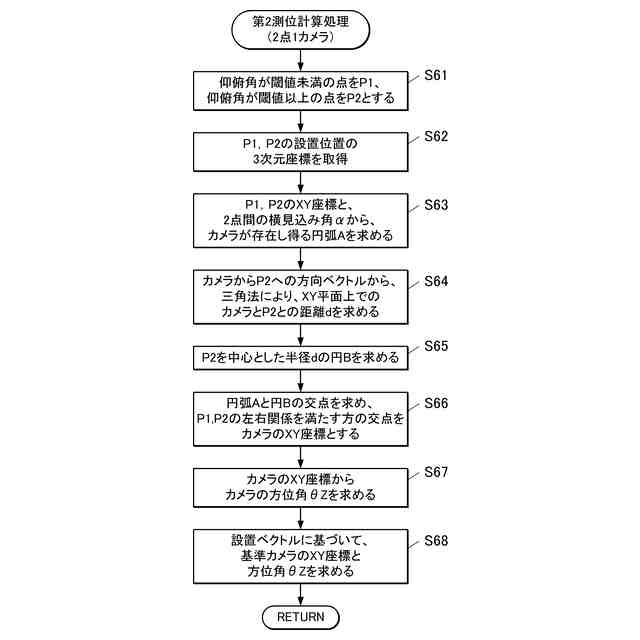
【請求項5】
前記制御部は、
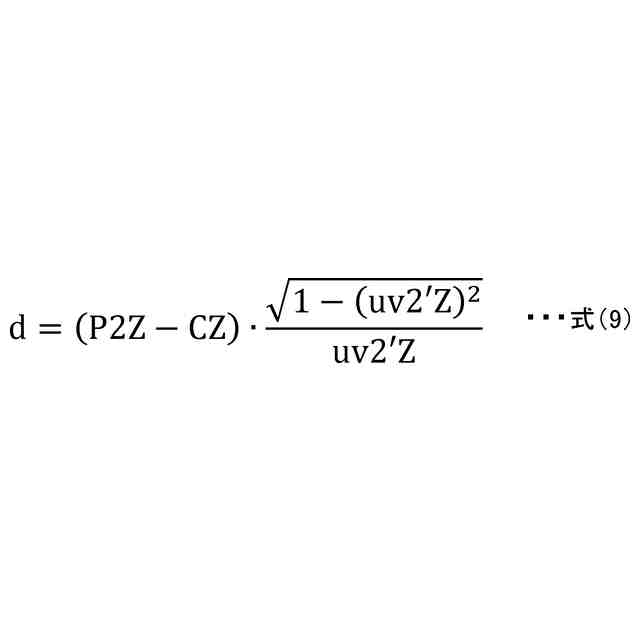
前記第1光源と前記撮像装置との高低差、及び、前記撮像装置の焦点を始点とし前記第1光源の前記3次元空間における座標位置を終点とする3次元方向ベクトルの単位ベクトルに基づいて、前記撮像装置と前記第1光源との水平方向における距離を求め、
前記第1光源の前記3次元空間における座標位置の水平成分であるXY座標位置を中心とし、前記距離を半径としたXY平面上の円を求め、
前記第1光源と前記第2光源との前記見込み角を取得し、
前記第1光源のXY座標位置、前記第2光源のXY座標位置、及び、前記第1光源と前記第2光源との前記見込み角に基づいて、XY平面上に投影された前記撮像装置が存在し得る位置を示す円弧を求め、
前記円と前記円弧との交点を、前記撮像装置のXY座標位置として求める請求項4に記載の情報処理装置。
【請求項6】
前記撮像装置として、第1撮像装置及び第2撮像装置を備え、
前記第1光源が、前記第1撮像装置により撮像された第1画像に含まれ、前記第2光源が、前記第2撮像装置により撮像された第2画像に含まれる場合に、
前記制御部は、
前記第1光源と前記第1撮像装置との高低差、及び、前記第1撮像装置の焦点を始点とし前記第1光源の前記3次元空間における座標位置を終点とする3次元方向ベクトルの単位ベクトルに基づいて、前記第1撮像装置と前記第1光源との水平方向における距離を求め、
前記第1光源の前記3次元空間における座標位置の水平成分であるXY座標位置を中心とし、前記距離を半径としたXY平面上の円を求め、
前記円上に前記第1撮像装置の仮のXY座標位置をとる第1処理を行い、
前記第1撮像装置の仮のXY座標位置から前記第1撮像装置の仮の方位を求める第2処理を行い、
前記第1撮像装置と前記第2撮像装置との相対位置関係に基づいて、前記第2撮像装置の仮のXY座標位置を求める第3処理を行い、
前記第2撮像装置の仮のXY座標位置から前記第2撮像装置の仮の方位を求める第4処理を行い、
前記第2撮像装置の仮のXY座標位置及び仮の方位から予測される当該第2撮像装置から前記第2光源に対する方位角と、前記第2画像内での前記第2光源に対する方位角と、の差が閾値以下になるまで、前記第1処理、前記第2処理、前記第3処理及び前記第4処理を繰り返す請求項4に記載の情報処理装置。
【請求項7】
前記制御部は、前記画像内の水平方向の位置が相互に異なる3つの光源の情報を使用して、前記自装置の座標位置及び方位の少なくとも一方を導出する請求項1に記載の情報処理装置。
【請求項8】
前記3つの光源を、前記画像の水平方向に沿って並んだ順に第1光源、第2光源及び第3光源として、
前記制御部は、
前記第1光源と前記第2光源との水平方向の見込み角である第1見込み角を取得し、
前記第2光源と前記第3光源との水平方向の見込み角である第2見込み角を取得し、
前記第1光源の前記3次元空間における座標位置の水平成分であるXY座標位置、前記第2光源のXY座標位置及び前記第1見込み角に基づいて、XY平面上に投影された前記撮像装置が存在し得る位置を示す円弧である第1円弧を求め、
前記第2光源のXY座標位置、前記第3光源のXY座標位置及び前記第2見込み角に基づいて、XY平面上に投影された前記撮像装置が存在し得る位置を示す円弧である第2円弧を求め、
前記第1円弧と前記第2円弧との交点を、前記撮像装置のXY座標位置として求める請求項7に記載の情報処理装置。
【請求項9】
前記第1見込み角及び前記第2見込み角は、閾値以上である請求項8に記載の情報処理装置。
【請求項10】
前記撮像装置として、第1撮像装置及び第2撮像装置を備え、
前記3つの光源のうち第1光源及び第2光源が、前記第1撮像装置により撮像された第1画像に含まれ、前記3つの光源のうち前記第1光源及び前記第2光源以外の第3光源が、前記第2撮像装置により撮像された第2画像に含まれる場合に、
前記制御部は、
前記第1画像から前記第1光源と前記第2光源との水平方向の見込み角を取得し、
前記第1光源の前記3次元空間における座標位置の水平成分であるXY座標位置、前記第2光源のXY座標位置、及び、前記第1光源と前記第2光源との前記見込み角に基づいて、XY平面上に投影された前記第1撮像装置が存在し得る位置を示す円弧を求め、
前記円弧上に前記第1撮像装置の仮のXY座標位置をとる第1処理を行い、
前記第1撮像装置の仮のXY座標位置から前記第1撮像装置の仮の方位を求める第2処理を行い、
前記第1撮像装置と前記第2撮像装置との相対位置関係に基づいて、前記第2撮像装置の仮のXY座標位置を求める第3処理を行い、
前記第2撮像装置の仮のXY座標位置から前記第2撮像装置の仮の方位を求める第4処理を行い、
前記第2撮像装置の仮のXY座標位置及び仮の方位から予測される当該第2撮像装置から前記第3光源に対する方位角と、前記第2画像内での前記第3光源に対する方位角と、の差が閾値以下になるまで、前記第1処理、前記第2処理、前記第3処理及び前記第4処理を繰り返す請求項7に記載の情報処理装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、情報処理装置、情報処理方法及びプログラムに関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
従来から、自己位置を推定するための様々な測位システムが利用されている。
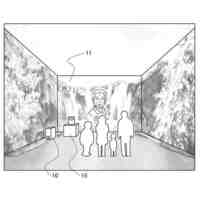
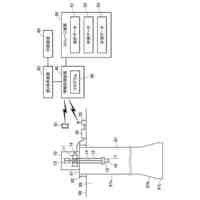
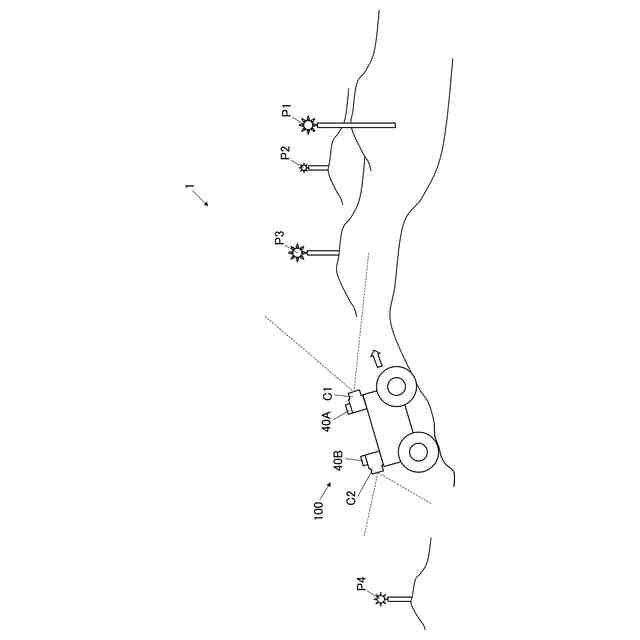
例えば、可視光通信(RGBの3色パターン等)により、自己を一意に特定可能なIDを発信する複数の発光装置(位置指標)を、移動体に搭載されたカメラで撮像することで、移動体の位置を推定する技術が提案されている(特許文献1参照)。
【0003】
具体的には、各発光装置の設置位置(3次元位置)を予め測定しておき、カメラで撮像された画像から、画像内における発光装置の座標位置及びIDを検出し、検出された撮像画像上の座標位置と、各発光装置の3次元位置とに基づいて、移動体の位置を決定する。
【0004】
前述の可視光通信を使った測位では、例えば、自己測位の対象として移動可能な空間を平面に限定し(平面拘束)、高さ、カメラ姿勢角の2自由度(ピッチ、ロール)を固定とすることで、カメラにより得られた画像から位置指標(光源)を2点(時間的に連続して位置指標を検出可能な状態では1点)検出できれば、3自由度(水平位置、水平方位)の測位が可能となっている。
【先行技術文献】
【特許文献】
【0005】
特開2022-050929号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、月面等では、一定平面内で移動が行われるとは考えられず、いわゆるオフロードでの活動となるため、自己位置を推定する際には、高さの変動、姿勢角の変動に対応したより多く(例えば、6自由度)の測位が必要となる。
【0007】
一方、月面上等での広域エリアを対象とした測位に可視光通信を利用する場合、位置指標の設置負荷を最小限に抑えつつ、できるだけ高精度で測位を行いたいという要求がある。しかし、6自由度の測位を公知の方法で安定して行うには、最小でも常に6点以上が見えるように、高密度で多数の位置指標を配置することが必要になってしまう。
このような要求のもと、広域エリアにおいて、カメラから常に多くの位置指標が見えるように、位置指標を配置するのは困難であった。
【0008】
本発明は、上記の従来技術における問題に鑑みてなされたものであって、自己位置の測位において、高精度の測位結果を提供することを課題とする。
【課題を解決するための手段】
【0009】
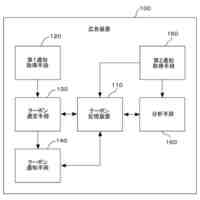
上記課題を解決するために、本発明の情報処理装置は、
3次元空間における座標位置が既知である複数の光源のうち、撮像装置により撮像された画像に含まれる光源の画像内の座標位置を取得し、
前記画像に含まれる光源の前記3次元空間における座標位置及び前記画像内の座標位置に基づいて、前記3次元空間における自装置の座標位置及び方位の少なくとも一方を導出する測位処理を行う制御部を備え、
前記制御部は、前記撮像装置からの所定方向への光源の角度又は光源間の水平方向の見込み角が所定の条件を満たす光源の情報を使用して、前記自装置の座標位置及び方位の少なくとも一方を導出する。
【発明の効果】
【0010】
本発明によれば、自己位置の測位において、高精度の測位結果を提供することができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
情報検索システム
11日前
個人
確率場データ同化演算手法
23日前
個人
技術実行管理システム
25日前
個人
納骨堂システム
1か月前
キヤノン株式会社
電子機器
10日前
キヤノン株式会社
電子機器
10日前
キヤノン株式会社
電子機器
10日前
シャープ株式会社
電子機器
24日前
株式会社イノベイト
広告装置
13日前
キヤノン電子株式会社
通信システム
3日前
個人
不動産情報提供システム
20日前
個人
ネイルスキルテストシステム
24日前
合同会社IPマネジメント
内部不正対策
18日前
トヨタ自動車株式会社
作業評価装置
3日前
トヨタ自動車株式会社
管理システム
5日前
株式会社NURSY
再就職の支援装置
4日前
西松建設株式会社
計測システム
9日前
TDK株式会社
等価回路
5日前
個人
公益寄付インタラクティブシステム
3日前
株式会社サマデイ
メンタリングシステム
25日前
株式会社ヒニアラタ
障害者支援システム
18日前
個人
外国為替証拠金取引定期自動売買システム
16日前
キヤノン株式会社
ワークフロー制御装置
1か月前
株式会社JVCケンウッド
情報処理装置
24日前
大王製紙株式会社
作業管理システム
4日前
株式会社インテック
触覚ディスプレイ装置
4日前
サクサ株式会社
警備サービス管理システム
13日前
富士フイルム株式会社
タッチセンサ
3日前
JUKI株式会社
電子名刺デバイス
24日前
ジャペル株式会社
登録管理システム
9日前
キオクシア株式会社
電子機器
9日前
NGB株式会社
制御装置
23日前
株式会社セラク
営農支援システム及び方法
19日前
株式会社デンソー
情報処理方法
11日前
ユニティガードシステム株式会社
警備管制システム
24日前
矢崎総業株式会社
情報処理装置
25日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ