TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025049761
公報種別
公開特許公報(A)
公開日
2025-04-04
出願番号
2023158143
出願日
2023-09-22
発明の名称
認識処理装置および認識処理方法
出願人
株式会社JVCケンウッド
代理人
個人
主分類
G06T
7/536 20170101AFI20250327BHJP(計算;計数)
要約
【課題】画像認識処理において検出対象物をより適切に検出する。
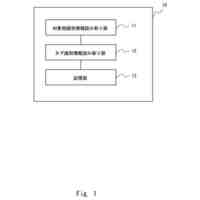
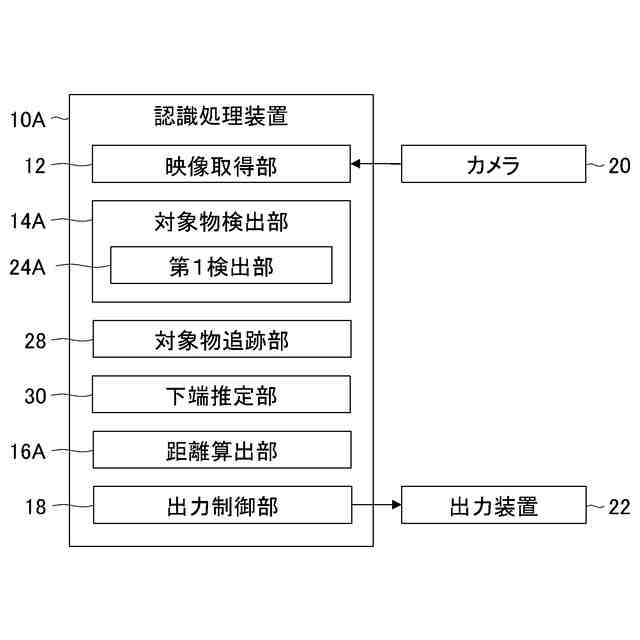
【解決手段】認識処理装置10Aは、撮像映像を取得する映像取得部12と、対象物の画像を機械学習した検出モデルを用いて、撮像映像に含まれる対象物を検出する対象物検出部14Aと、対象物検出部14Aによって撮像映像の下縁に重なる範囲に含まれる対象物が検出された場合、撮像映像の下縁よりも下側に位置しうる対象物の下端位置を推定する下端推定部30と、下端推定部30によって推定される下端位置を用いて、対象物の距離情報を算出する距離算出部16Aと、を備える。
【選択図】図7
特許請求の範囲
【請求項1】
撮像映像を取得する映像取得部と、
対象物の画像を機械学習した検出モデルを用いて、前記撮像映像に含まれる対象物を検出する対象物検出部と、
前記対象物検出部によって前記撮像映像の下縁に重なる範囲に含まれる対象物が検出された場合、前記撮像映像の下縁よりも下側に位置しうる前記対象物の下端位置を推定する下端推定部と、
前記下端推定部によって推定される下端位置を用いて、前記対象物の距離情報を算出する距離算出部と、
を備える認識処理装置。
続きを表示(約 790 文字)
【請求項2】
前記対象物検出部によって検出された対象物を追跡する対象物追跡部をさらに備え、
前記下端推定部は、前記対象物追跡部によって追跡される対象物の下端位置が前記撮像映像の下縁よりも下側に向かうときの前記対象物の動きに基づいて、前記撮像映像の下縁よりも下側に位置しうる前記対象物の下端位置を推定する、
請求項1に記載の認識処理装置。
【請求項3】
前記下端推定部は、前記対象物検出部が検出した対象物における前記撮像映像の下縁よりも上側のサイズに基づいて、前記対象物の下端位置を推定する、
請求項2に記載の認識処理装置。
【請求項4】
前記対象物検出部は、検出対象物の全体画像を機械学習した第1検出モデルを用いて、前記撮像映像に含まれる対象物を検出し、
前記対象物検出部は、前記第1検出モデルを用いて前記撮像映像の下縁に重なる範囲に含まれる対象物を検出した場合、対象物の上部分画像を機械学習した第2検出モデルを用いて、前記撮像映像の下縁に重なる範囲に含まれる対象物を検出し、
前記下端推定部は、前記第2検出モデルを用いて検出した対象物の検出領域の下端位置を用いて、前記対象物の下端位置を推定する、
請求項1に記載の認識処理装置。
【請求項5】
撮像映像を取得するステップと、
対象物の画像を機械学習した検出モデルを用いて、前記撮像映像に含まれる対象物を検出するステップと、
前記撮像映像の下縁に重なる範囲に含まれる対象物が検出された場合、前記撮像映像の下縁よりも下側に位置しうる前記対象物の下端位置を推定するステップと、
前記推定される下端位置を用いて、前記対象物の距離情報を算出するステップと、
を認識処理装置が実行する認識処理方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、認識処理装置および認識処理方法に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
車両の周囲を撮像した画像から歩行者などの対象物をパターンマッチング等の画像認識処理を用いて検出する技術が知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2022-139374号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
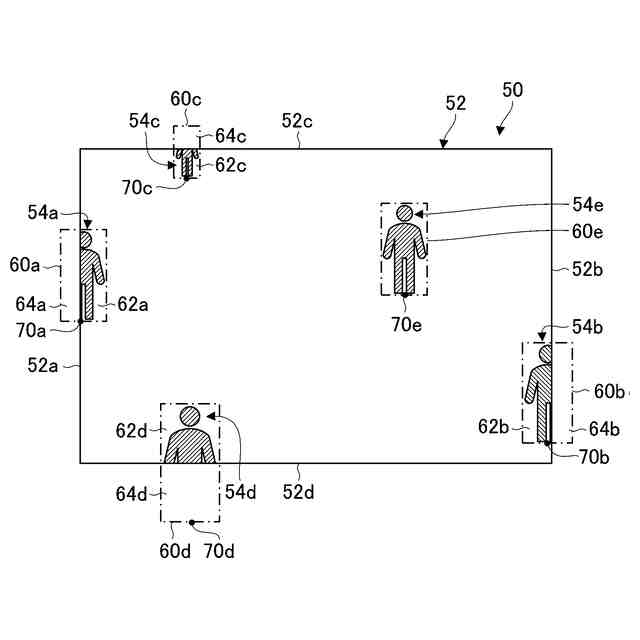
カメラで撮像される映像の外縁付近に対象物が位置する場合、対象物の全体像が映像に含まれないために、対象物を適切に検出できない場合があった。
【0005】
本発明は、上述の事情に鑑みてなされたものであり、画像認識処理において対象物をより適切に検出する技術を提供することにある。
【課題を解決するための手段】
【0006】
本発明のある態様の認識処理装置は、撮像映像を取得する映像取得部と、対象物の画像を機械学習した検出モデルを用いて、撮像映像に含まれる対象物を検出する対象物検出部と、対象物検出部によって撮像映像の下縁に重なる範囲に含まれる対象物が検出された場合、撮像映像の下縁よりも下側に位置しうる対象物の下端位置を推定する下端推定部と、下端推定部によって推定される下端位置を用いて、対象物の距離情報を算出する距離算出部と、を備える。
【0007】
本発明の別の態様は、認識処理方法であり、撮像映像を取得するステップと、対象物の画像を機械学習した検出モデルを用いて、撮像映像に含まれる対象物を検出するステップと、撮像映像の下縁に重なる範囲に含まれる対象物が検出された場合、撮像映像の下縁よりも下側に位置しうる対象物の下端位置を推定するステップと、推定される下端位置を用いて、対象物の距離情報を算出するステップと、を認識処理装置が実行する。
【発明の効果】
【0008】
本発明のある態様によれば、画像認識処理において対象物をより適切に検出する技術を提供できる。
【図面の簡単な説明】
【0009】
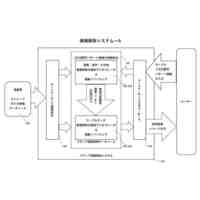
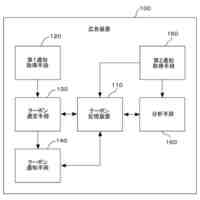
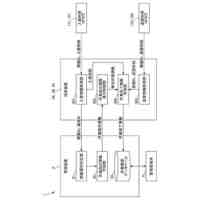
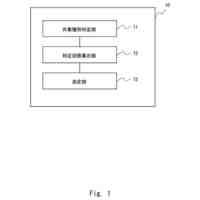
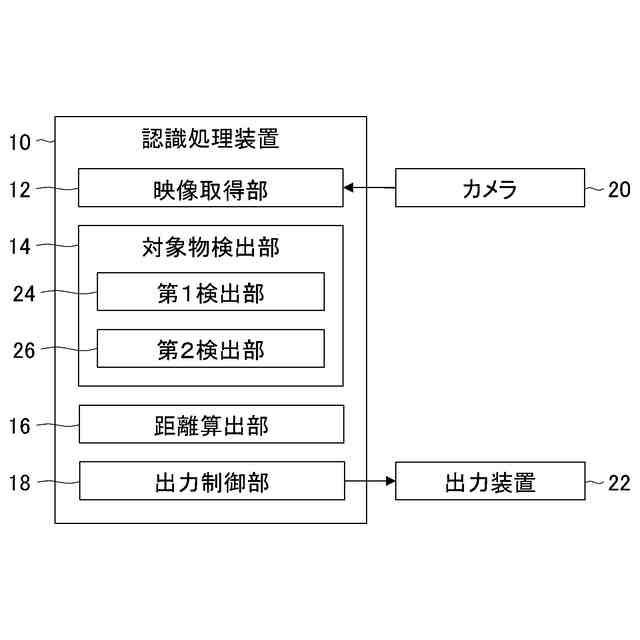
第1実施形態に係る認識処理装置の機能構成を模式的に示すブロック図である。
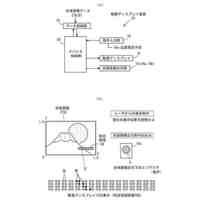
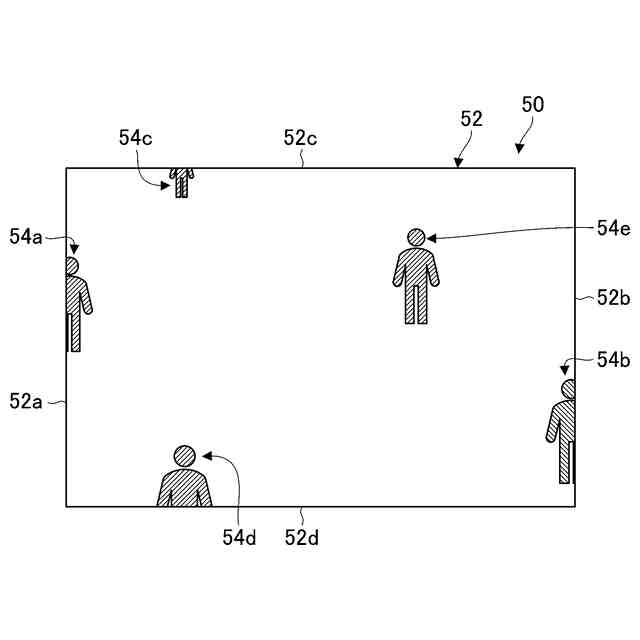
対象物を含む撮像映像の一例を模式的に示す図である。
撮像映像に対して設定される検出領域の一例を模式的に示す図である。
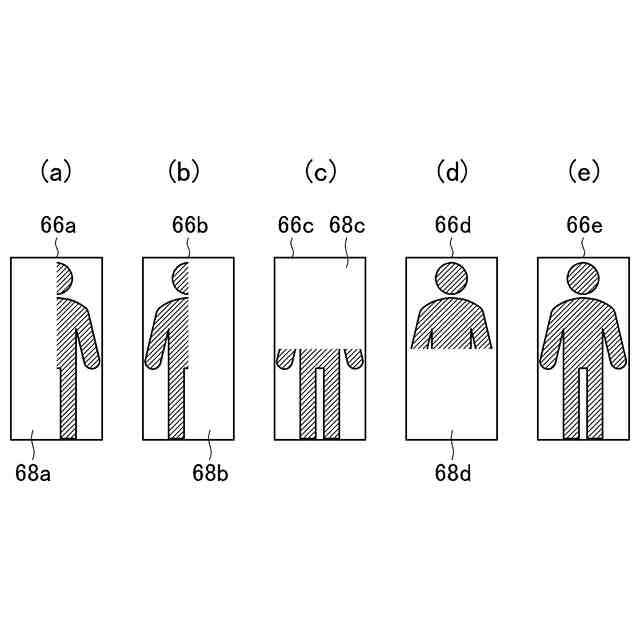
図4(a)~(e)は、検出モデルの機械学習に用いる入力画像の一例を模式的に示す図である。
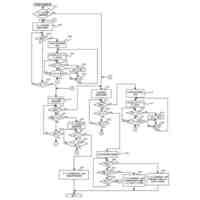
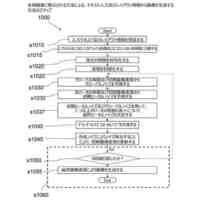
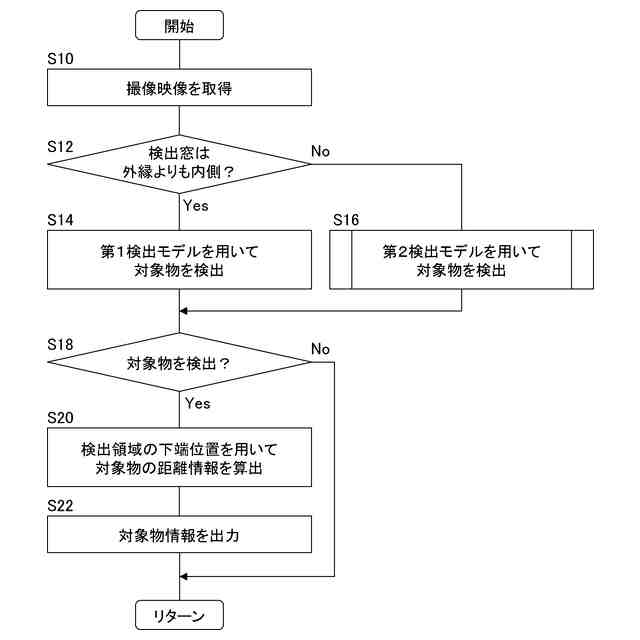
第1実施形態に係る認識処理方法の流れの一例を示すフローチャートである。
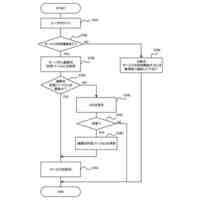
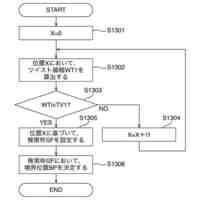
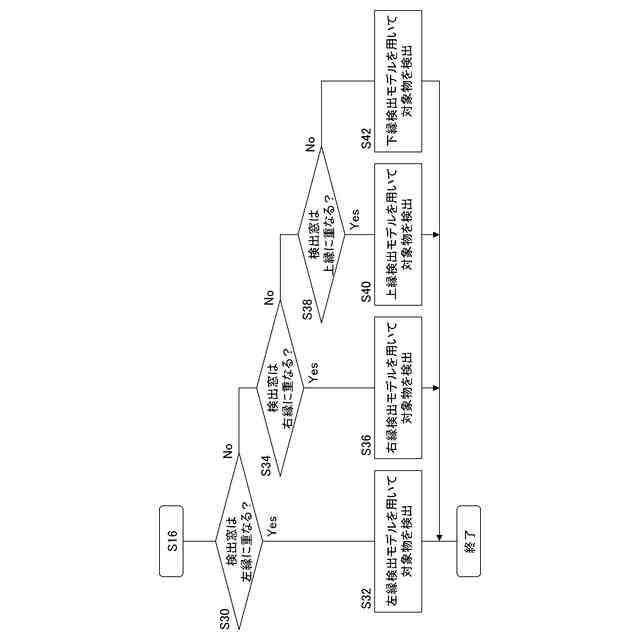
図5のステップS16の処理の流れの一例を示すフローチャートである。
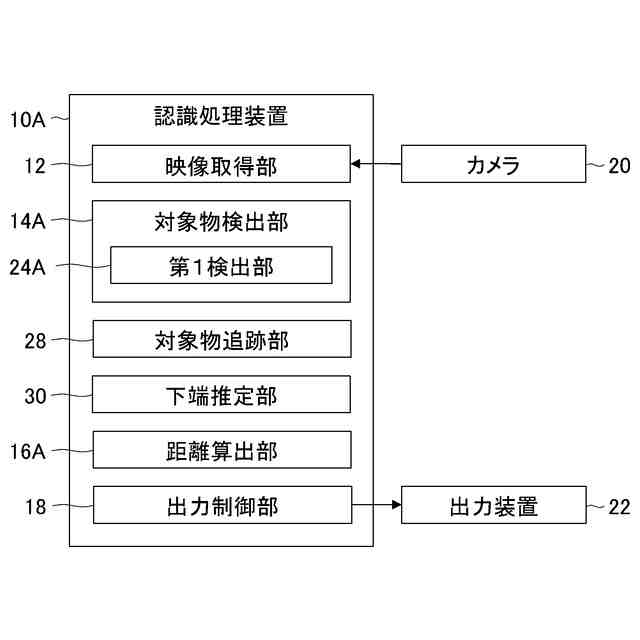
第2実施形態に係る認識処理装置の機能構成を模式的に示すブロック図である。
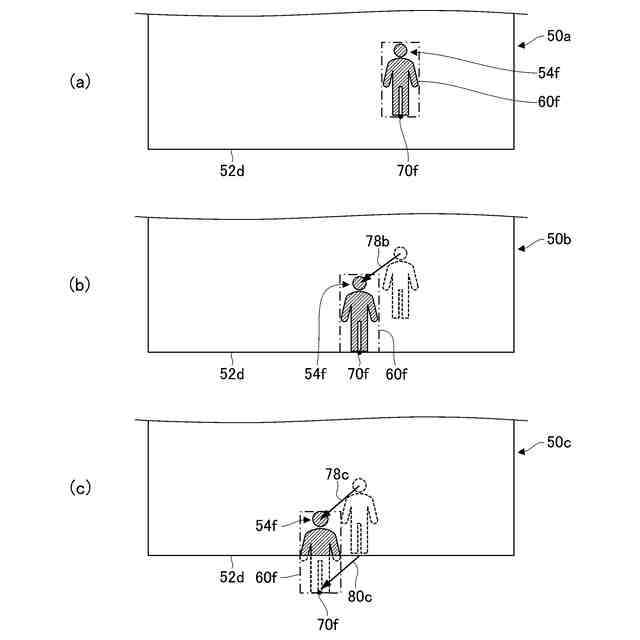
図8(a)~(c)は、撮像映像を構成する複数フレームにわたって追跡される対象物の一例を模式的に示す図である。
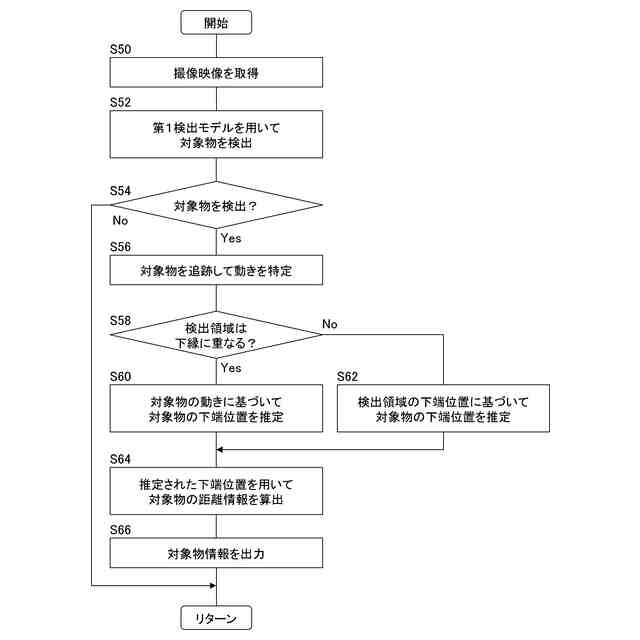
第2実施形態に係る認識処理方法の流れの一例を示すフローチャートである。
第3実施形態に係る認識処理装置の機能構成を模式的に示すブロック図である。
図11(a),(b)は、撮像映像の下縁に位置する対象物の検出方法の一例を模式的に示す図である。
第3実施形態に係る認識処理方法の流れの一例を示すフローチャートである。
【発明を実施するための形態】
【0010】
以下、本発明の実施の形態について、図面を参照しつつ説明する。かかる実施の形態に示す具体的な数値等は、発明の理解を容易とするための例示にすぎず、特に断る場合を除き、本発明を限定するものではない。なお、図面において、本発明に直接関係のない要素は図示を省略する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
情報検索システム
10日前
個人
確率場データ同化演算手法
22日前
個人
技術実行管理システム
24日前
シャープ株式会社
電子機器
23日前
キヤノン株式会社
電子機器
9日前
キヤノン株式会社
電子機器
9日前
キヤノン株式会社
電子機器
9日前
キヤノン電子株式会社
通信システム
2日前
個人
不動産情報提供システム
19日前
株式会社イノベイト
広告装置
12日前
個人
ネイルスキルテストシステム
23日前
合同会社IPマネジメント
内部不正対策
17日前
トヨタ自動車株式会社
管理システム
4日前
トヨタ自動車株式会社
作業評価装置
2日前
西松建設株式会社
計測システム
8日前
TDK株式会社
等価回路
4日前
株式会社NURSY
再就職の支援装置
3日前
個人
外国為替証拠金取引定期自動売買システム
15日前
株式会社JVCケンウッド
情報処理装置
23日前
個人
公益寄付インタラクティブシステム
2日前
株式会社ヒニアラタ
障害者支援システム
17日前
株式会社サマデイ
メンタリングシステム
24日前
富士フイルム株式会社
タッチセンサ
2日前
JUKI株式会社
電子名刺デバイス
23日前
大王製紙株式会社
作業管理システム
3日前
株式会社インテック
触覚ディスプレイ装置
3日前
キオクシア株式会社
電子機器
8日前
株式会社セラク
営農支援システム及び方法
18日前
NGB株式会社
制御装置
22日前
ジャペル株式会社
登録管理システム
8日前
サクサ株式会社
警備サービス管理システム
12日前
富士通株式会社
画像生成方法
1日前
トヨタ自動車株式会社
作業種別決定システム
23日前
個人
検索システム及び検索方法
23日前
FCLコンポーネント株式会社
タッチパネル
23日前
矢崎総業株式会社
情報処理装置
24日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ