TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025039275
公報種別
公開特許公報(A)
公開日
2025-03-21
出願番号
2023146245
出願日
2023-09-08
発明の名称
運転支援装置、運転支援処理方法及びプログラム
出願人
株式会社SUBARU
代理人
弁理士法人太田特許事務所
主分類
G08G
1/09 20060101AFI20250313BHJP(信号)
要約
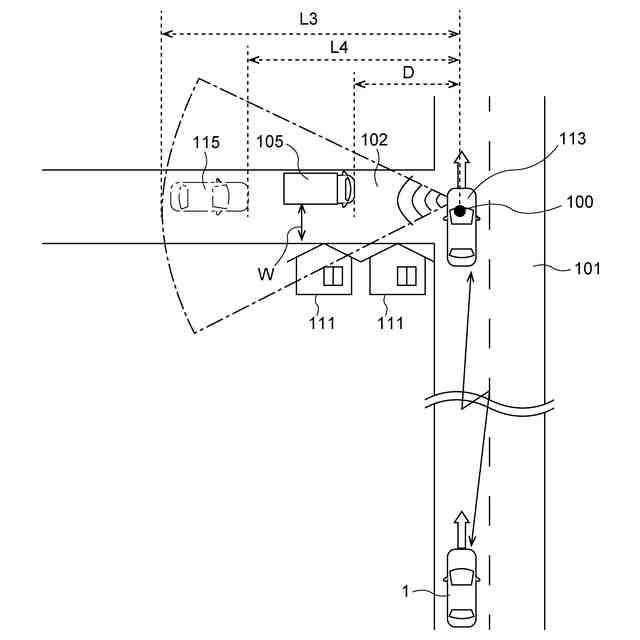
【課題】死角となる合流地点を通過する際に、死角から飛び出すおそれのある移動体の有無の予測精度を向上する。
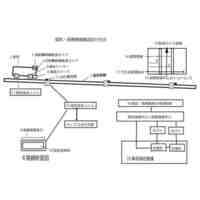
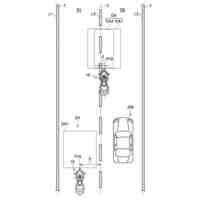
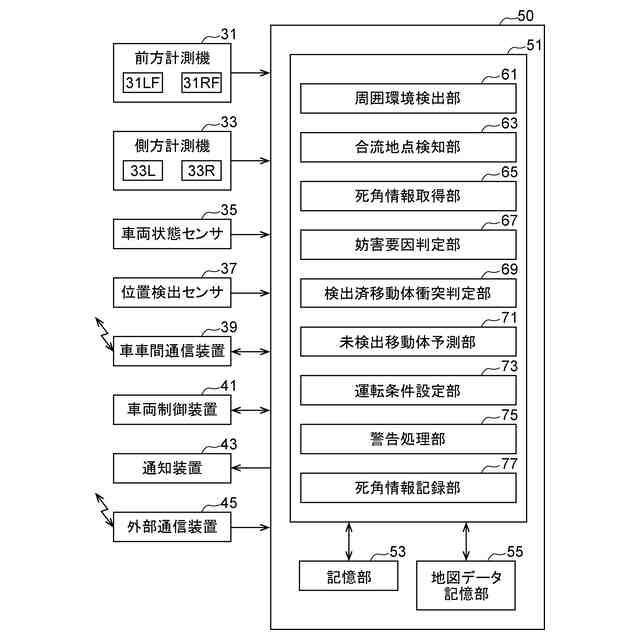
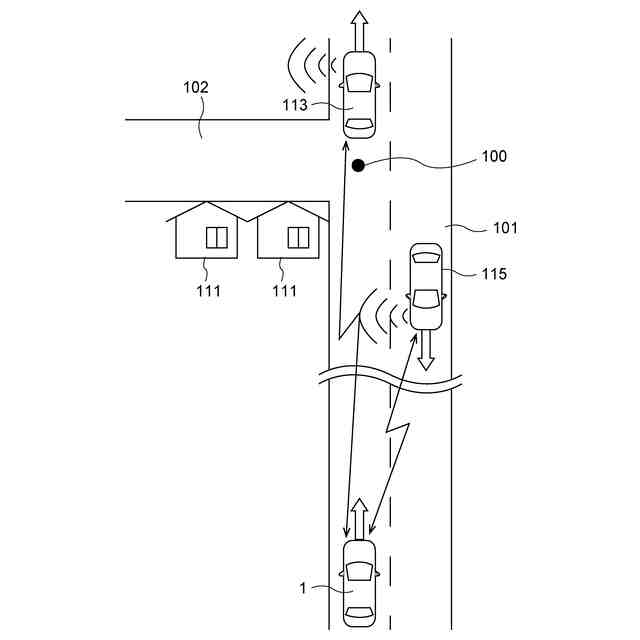
【解決手段】運転支援装置は、車両が走行中の第1道路に合流する第2道路との合流地点であって、第2道路の奥が車両から見て死角となって視認できない合流地点を検知したときに、合流地点を通過した他車両が検出した第2道路の物体検出結果の情報を取得し、取得した物体検出結果の情報に基づいて、第2道路を移動する移動体の通行を妨げる要因が有るか否かを判定し、移動体の通行を妨げる要因が有ると判定した場合に、要因の位置及び存在範囲に基づいて、他車両により検出されていない未検出移動体が第2道路から合流地点へ進入する可能性を判定する。
【選択図】図16
特許請求の範囲
【請求項1】
運転者による車両の運転を支援する運転支援装置において、
一つ又は複数のプロセッサと、前記一つ又は複数のプロセッサと通信可能に接続された一つ又は複数のメモリと、を備え、
前記一つ又は複数のプロセッサは、
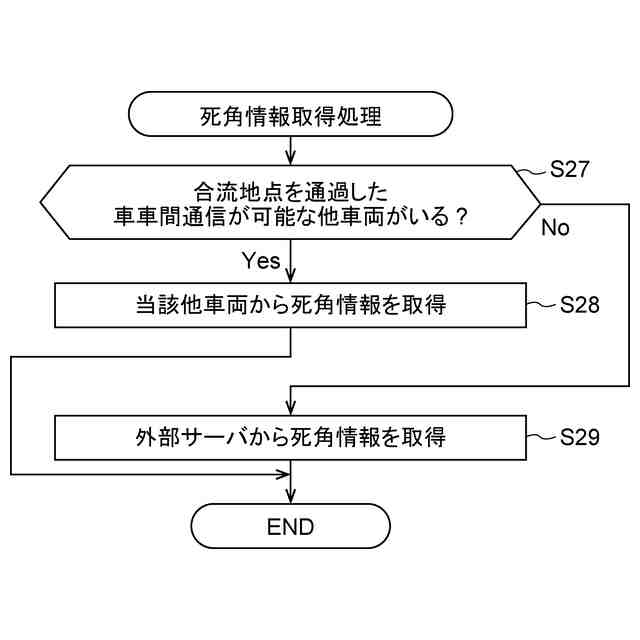
前記車両が走行中の第1道路に合流する第2道路との合流地点であって、前記第2道路の奥が前記車両から見て死角となって視認できない前記合流地点を検知したときに、前記合流地点を通過した他車両が検出した前記第2道路の物体検出結果の情報を取得する死角情報取得処理と、
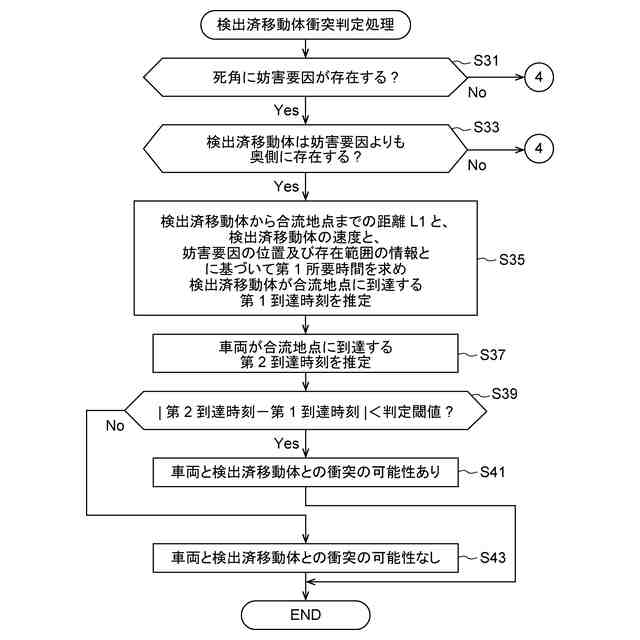
取得した前記物体検出結果の情報に基づいて、前記第2道路を移動する移動体の通行を妨げる要因が有るか否かを判定し、前記移動体の通行を妨げる要因が有ると判定した場合に、前記要因の位置及び存在範囲に基づいて、前記他車両により検出されていない未検出移動体が前記第2道路から前記合流地点へ進入する可能性を判定する未検出移動体予測処理と、
を実行する、運転支援装置。
続きを表示(約 1,100 文字)
【請求項2】
前記一つ又は複数のプロセッサは、
前記未検出移動体予測処理において、
前記移動体の通行を妨げる要因が有り、かつ、前記他車両による前記第2道路の検出範囲の奥行き方向の最大検出距離(L3)を前記第2道路を走行する仮想の前記未検出移動体の仮想速度で走行したときに前記未検出移動体が前記合流地点に到達すると推定される第1仮想到達時刻と、前記車両が前記合流地点に到達すると推定される第2到達時刻との差が所定の判定閾値未満の場合に、前記未検出移動体が前記第2道路から前記合流地点へ進入する可能性があると判定する、
請求項1に記載の運転支援装置。
【請求項3】
前記一つ又は複数のプロセッサは、
前記未検出移動体予測処理において、
前記要因の位置及び存在範囲に基づいて前記未検出移動体の前記仮想速度を設定し、前記未検出移動体が前記第2道路から前記合流地点へ進入する可能性を判定する、
請求項2に記載の運転支援装置。
【請求項4】
運転者による車両の運転を支援する運転支援処理方法において、
コンピュータが、
前記車両が走行中の第1道路に合流する第2道路との合流地点であって、前記第2道路の奥が前記車両から見て死角となって視認できない前記合流地点を検知したときに、前記合流地点を通過した他車両が検出した前記第2道路の物体検出結果の情報を取得することと、
取得した前記物体検出結果の情報に基づいて、前記第2道路を移動する移動体の通行を妨げる要因が有るか否かを判定し、前記移動体の通行を妨げる要因が有ると判定した場合に、前記要因の位置及び存在範囲に基づいて、前記他車両により検出されていない未検出移動体が前記第2道路から前記合流地点へ進入する可能性を判定することと、
を実行する、運転支援処理方法。
【請求項5】
コンピュータに、
車両が走行中の第1道路に合流する第2道路との合流地点であって、前記第2道路の奥が前記車両から見て死角となって視認できない前記合流地点を検知したときに、前記合流地点を通過した他車両が検出した前記第2道路の物体検出結果の情報を取得することと、
取得した前記物体検出結果の情報に基づいて、前記第2道路を移動する移動体の通行を妨げる要因が有るか否かを判定し、前記移動体の通行を妨げる要因が有ると判定した場合に、前記要因の位置及び存在範囲に基づいて、前記他車両により検出されていない未検出移動体が前記第2道路から前記合流地点へ進入する可能性を判定することと、
を実行させる、プログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、運転支援装置、運転支援処理方法及びプログラムに関する。
続きを表示(約 2,700 文字)
【背景技術】
【0002】
車両の運転中において、車両から見て視認できない死角から他の車両や歩行者等が飛び出す危険が存在する。これに対して、特許文献1には、自車両の進行方向における、運転者からの死角を認識する死角認識部と、死角から飛び出して来る可能性のある移動体に関する情報として、移動体の想定速度を少なくとも含む移動体情報を設定する移動体情報設定部と、移動体情報設定部で設定される移動体情報に基づいて、進行方向へ進んだ場合に自車両が移動体と接触する可能性がある、自車両の速度領域を演算する速度領域演算部と、速度領域に基づいて自車両の目標速度を演算する目標速度演算部と、死角を構成する場所へ進入するときの自車両の目標速度である死角進入目標速度、自車両の現在速度、及び減速のための目標加速度に基づいて、自車両を現在速度から死角進入目標速度まで減速するための目標速度プロファイルを作成する目標速度プロファイル作成部と、を備える運転支援装置が開示されている。
【0003】
また、特許文献2には、運転者が車両を運転中、目視できない死角に存在する歩行者、車両等を事前に認識することができ、死角からの飛び出しによる交通事故発生を未然に防止する車両用通信装置が提案されている。具体的に、特許文献2には、車両の側面方向を撮像し側面画像を得る側面撮像手段と、側面画像を、車両の後方に位置する他の車両に発信する発信手段と、前方に位置する車両から発信された側面画像を受信する受信手段と、受信した側面画像に基づき、前方の側面方向の状況を運転者に通知する通知手段とを備えた車両用通信装置が開示されている。
【先行技術文献】
【特許文献】
【0004】
特開2014-504575号公報
特開2007-60054号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に開示された運転支援装置は、実際には死角に移動体が存在しない場合であっても死角から飛び出してくるおそれのある移動体を想定し、車両の速度や走行位置を設定する。このため、死角が存在するすべての場面で車両の速度や走行位置が制御され、運転者が煩わしく感じるおそれがある。また、特許文献1に開示された運転支援装置は、死角から飛び出すおそれのある移動体の想定速度を、当該移動体が走行する道路の法定速度や過去の統計に基づいた平均的な進入車両速度、自車両の速度に設定する構成を有している。このため、当該移動体が走行する道路に、一時的に存在する駐車車両や工事現場等の、移動体の通行を妨げる要因が存在する場合には、移動体の想定速度が実際の移動体の速度と大きく異なるおそれがある。
【0006】
また、特許文献2に開示された車両用通信装置は、前方に位置する車両が取得した側面画像を後方に位置する車両が受信し、受信した側面画像に基づいて前方の側面方向の状況を運転者に通知する構成を有している。しかしながら、特許文献2に開示された車両用通信装置においても、当該死角となる道路に、一時的に存在する駐車車両や工事現場等の、移動体の通行を妨げる要因が存在し、当該要因によって前方に位置する車両が移動体を検知できなかった場合に、後方に位置する車両が当該移動体の飛び出しの可能性を予測できないおそれがある。
【0007】
本開示は、上記問題に鑑みてなされたものであり、本開示の目的とするところは、死角となる合流地点を通過する際に、死角から飛び出すおそれのある移動体の有無の予測精度を向上可能な運転支援装置、運転支援処理方法及びプログラムを提供することにある。
【課題を解決するための手段】
【0008】
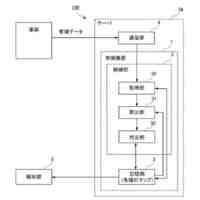
上記課題を解決するために、本開示のある観点によれば、運転者による車両の運転を支援する運転支援装置において、一つ又は複数のプロセッサと、上記一つ又は複数のプロセッサと通信可能に接続された一つ又は複数のメモリと、を備え、上記一つ又は複数のプロセッサは、上記車両が走行中の第1道路に合流する第2道路との合流地点であって、上記第2道路の奥が上記車両から見て死角となって視認できない上記合流地点を検知したときに、上記合流地点を通過した他車両が検出した上記第2道路の物体検出結果の情報を取得する死角情報取得処理と、取得した上記物体検出結果の情報に基づいて、上記第2道路を移動する移動体の通行を妨げる要因が有るか否かを判定し、上記移動体の通行を妨げる要因が有ると判定した場合に、上記要因の位置及び存在範囲に基づいて、上記他車両により検出されていない未検出移動体が上記第2道路から上記合流地点へ進入する可能性を判定する未検出移動体予測処理と、を実行する運転支援装置が提供される。
【0009】
また、上記課題を解決するために本開示の別の観点によれば、運転者による車両の運転を支援する運転支援処理方法において、コンピュータが、上記車両が走行中の第1道路に合流する第2道路との合流地点であって、上記第2道路の奥が上記車両から見て死角となって視認できない上記合流地点を検知したときに、上記合流地点を通過した他車両が検出した上記第2道路の物体検出結果の情報を取得することと、取得した上記物体検出結果の情報に基づいて、上記第2道路を移動する移動体の通行を妨げる要因が有るか否かを判定し、上記移動体の通行を妨げる要因が有ると判定した場合に、上記要因の位置及び存在範囲に基づいて、上記他車両により検出されていない未検出移動体が上記第2道路から上記合流地点へ進入する可能性を判定することと、を実行する運転支援処理方法が提供される。
【0010】
また、上記課題を解決するために本開示の別の観点によれば、コンピュータに、車両が走行中の第1道路に合流する第2道路との合流地点であって、上記第2道路の奥が上記車両から見て死角となって視認できない上記合流地点を検知したときに、上記合流地点を通過した他車両が検出した上記第2道路の物体検出結果の情報を取得することと、取得した上記物体検出結果の情報に基づいて、上記第2道路を移動する移動体の通行を妨げる要因が有るか否かを判定し、上記移動体の通行を妨げる要因が有ると判定した場合に、上記要因の位置及び存在範囲に基づいて、上記他車両により検出されていない未検出移動体が上記第2道路から上記合流地点へ進入する可能性を判定することと、を実行させるプログラムが提供される。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
安全運転車両
1か月前
個人
自動車ケアフル灯
28日前
能美防災株式会社
発信機
1か月前
個人
逆走・正走車両検出システム
8日前
日本信号株式会社
情報提供システム
7日前
個人
磁気・光学誘導路線による車両の運行制御
1日前
タック株式会社
安全監視システム
1か月前
株式会社JVCケンウッド
通知システム
1か月前
三菱ロジスネクスト株式会社
搬送システム
1か月前
三菱ロジスネクスト株式会社
搬送システム
1か月前
トヨタ自動車株式会社
配車システム
今日
三菱ロジスネクスト株式会社
搬送システム
1か月前
株式会社アジラ
注目行動呼びかけシステム
1か月前
三菱ロジスネクスト株式会社
搬送システム
1か月前
能美防災株式会社
非常報知システム
15日前
東亜電子工業株式会社
警報コントローラ
23日前
トヨタ自動車株式会社
車両
1か月前
矢崎総業株式会社
路面監視装置
29日前
愛知時計電機株式会社
生活データ集計装置
29日前
パナソニックIPマネジメント株式会社
火災警報器
29日前
トヨタ自動車株式会社
配車装置
7日前
日本電気株式会社
監視装置、監視方法、及びプログラム
25日前
個人
除排雪判断支援システムおよびプログラム、道路管理方法
1か月前
能美防災株式会社
加煙試験器
1か月前
本田技研工業株式会社
車両
29日前
株式会社NTTドコモ
予測装置
16日前
いすゞ自動車株式会社
システム
1か月前
オンキヨー株式会社
車軸数検出システム、及び、車軸数検出方法
22日前
トヨタ自動車株式会社
配車システム
23日前
トヨタ自動車株式会社
情報処理装置
1か月前
トヨタ自動車株式会社
情報処理装置
1か月前
株式会社JVCケンウッド
吸着デバイス及び吸着システム
15日前
株式会社JVCケンウッド
情報処理装置及び情報処理方法
1か月前
京セラ株式会社
制御装置及び制御方法
7日前
矢崎総業株式会社
運転支援装置
7日前
矢崎総業株式会社
異常検出装置
7日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ