TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025039076
公報種別
公開特許公報(A)
公開日
2025-03-21
出願番号
2023145893
出願日
2023-09-08
発明の名称
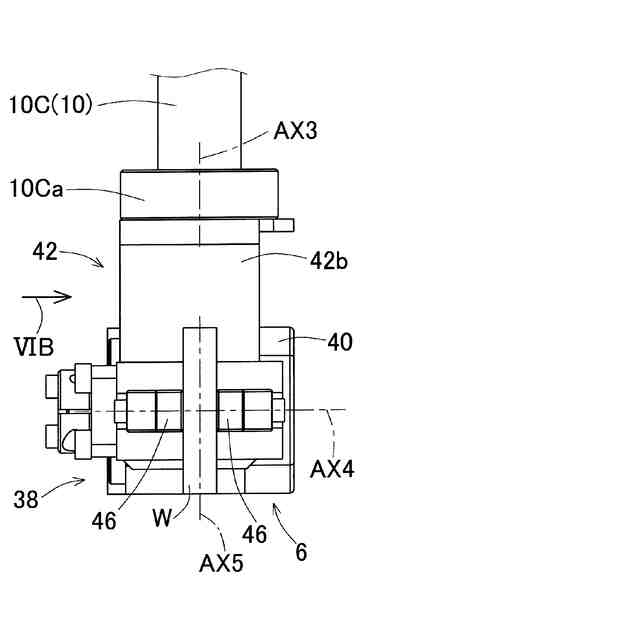
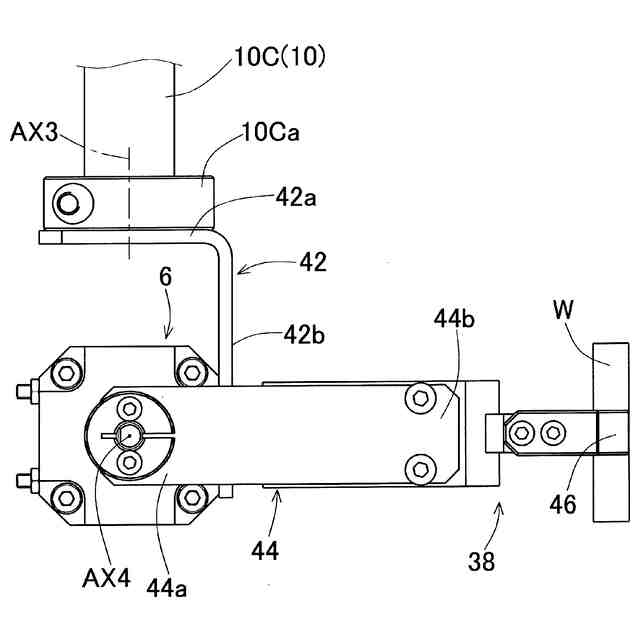
ハンドおよびこれを備えた部品供給システム
出願人
NTN株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
,
個人
主分類
B25J
15/08 20060101AFI20250313BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】簡単な構成で、搬送台に対して僅かに傾いた円筒形状のワーク、異径の円筒形状のワークも安定してピックアップすることができるハンドおよびこれを備えた部品供給システムを提供する。
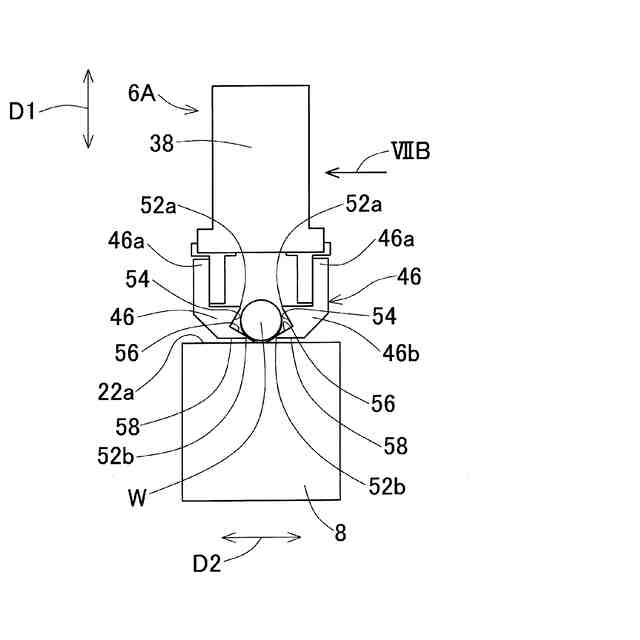
【解決手段】本発明のハンド6の把持部38は、開閉方向に移動してワークWを把持する又は離す一対の爪46を有する。爪46は、基端部で把持部38に開閉方向に移動可能に支持され、把持部38から長手方向に延び、その先端部にワークWを把持する把持面52を有する。把持面52は第1の傾斜面54と第2の傾斜面56とを有し、先端側角度αが、基端側角度βよりも小さく設定されている。
【選択図】図9
特許請求の範囲
【請求項1】
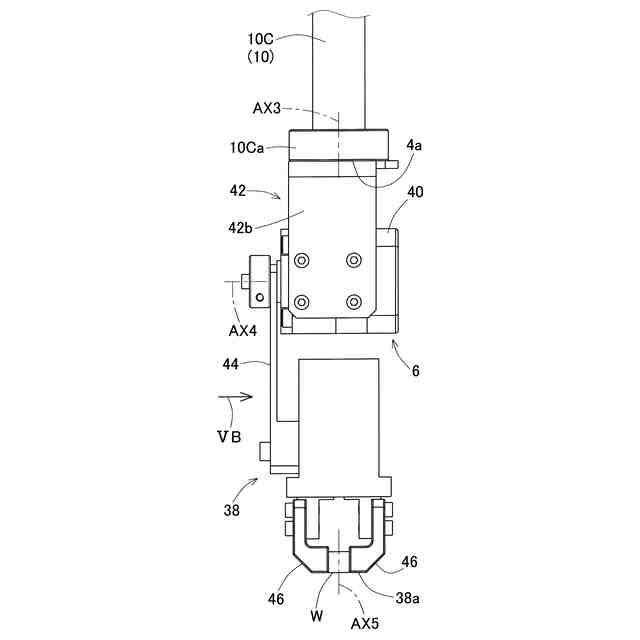
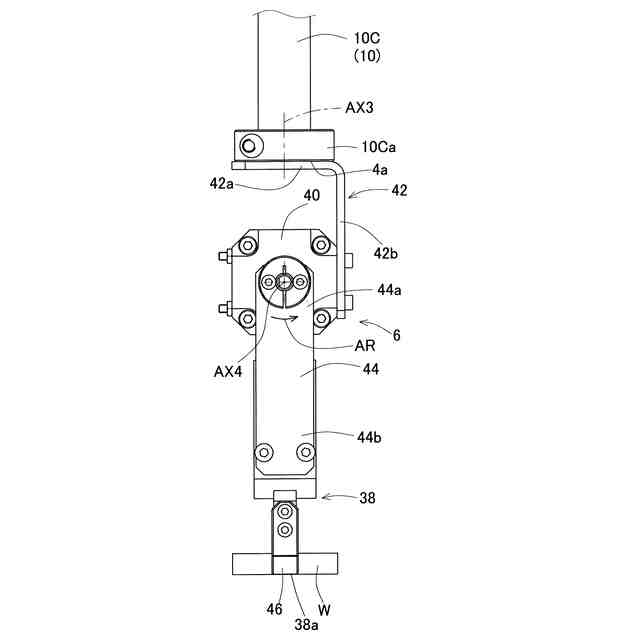
ワークを把持する又は離す把持部と、前記把持部の姿勢を変更するアクチュエータとを有するハンドであって、
前記把持部は、開閉方向に移動して前記ワークを把持する又は離す一対の爪を有し、
前記爪は、基端部で前記把持部に前記開閉方向に移動可能に支持され、前記把持部から長手方向に延び、その先端部に前記ワークを把持する把持面を有し、
前記把持面は、
その長手方向の基端側の端部から長手方向の先端側に向かって前記開閉方向における前記ワークを離す開方向に傾斜して延びる第1の傾斜面と、
その長手方向の先端側の端部から長手方向の基端側に向かって前記開閉方向における前記ワークを離す開方向に傾斜して延びて、前記第1の傾斜面に連なる第2の傾斜面と、
を有し、
前記長手方向と前記開閉方向に直交する直交方向から見て、前記第2の傾斜面を先端側に延長した先端側の仮想線と前記搬送台の水平な搬送面とのなす先端側角度αが、前記第1の傾斜面を基端側に延長した基端側の仮想線と前記搬送面に平行な平行線とのなす基端側角度βよりも小さく設定されているハンド。
続きを表示(約 620 文字)
【請求項2】
請求項1に記載のハンドにおいて、前記先端側角度αが、25°以上で30°以下に設定され、
前記基端側角度βが、50°よりも大きく、60°よりも小さく設定されているハンド。
【請求項3】
請求項1または2に記載のハンドにおいて、前記第1の傾斜面および前記第2の傾斜面の少なくとも一方の面の摩擦係数が0.2以下に設定されているハンド。
【請求項4】
前記ワークを搬送台に供給する部品供給装置と、
前記搬送台が配置された第1のエリアから該第1のエリアとは異なる第2のエリアに前記ワークを搬送するロボットと、
前記ロボットのアームの先端に取り付けられて、前記第1のエリアで前記搬送台上の前記ワークをピックアップし、前記第2のエリアで前記ワークを置く請求項1または2に記載のハンドと、
を備えた部品供給システム。
【請求項5】
請求項4に記載の部品供給システムにおいて、さらに、
前記搬送台上の前記ワークの位置および姿勢を検出するワーク検出手段と、
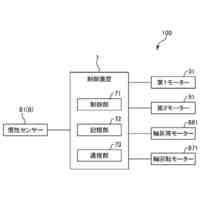
前記部品供給装置、前記ロボットおよび前記ハンドを同期制御する制御装置と、
を備え、
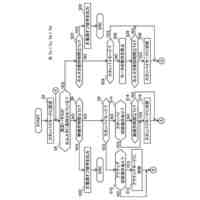
前記制御装置は、前記ワーク検出手段で検出された位置に前記ロボットの前記アームを移動させ、前記ワーク検出手段で検出された姿勢に応じた角度で前記ハンドに前記ワークを把持させる部品供給システム。
発明の詳細な説明
【技術分野】
【0001】
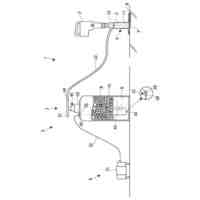
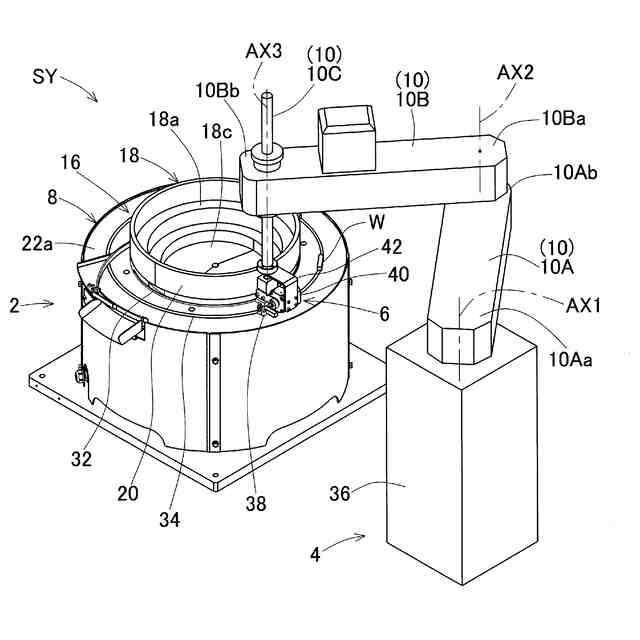
本発明は、機械部品、電子部品等のワークを搬送台に供給する部品供給装置と、搬送台上でワークをピックアップして次の工程に供給するロボットとを備えた部品供給システムに関し、特に、ワークを把持する又は離す把持部を有するハンドに関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
ボルト、電子部品等のワークをハンドの先端に設置した爪で把持する装置がある(例えば、特許文献1、2)。特許文献1の装置では、爪のワーク把持面が平面となっている。また、特許文献2の装置では、爪の把持面にワークの形状に合わせた切欠きを設け、複数のワーク形状に合った爪をハンド先端に回転可能に配置し、爪自体を回転させることで複数種類のワークを持ち上げて搬送可能となっている。
【先行技術文献】
【特許文献】
【0003】
特開2002-283268号公報
特許第5408186号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1のような把持面が平面の爪では、ボルト、ピン等の円柱・円筒形状のワークを把持する場合、ワークが把持面で滑って落ち易い。そのため、ワークを持ち上げることができなかったり、搬送中にワークが落ちてしまったりし易い。特許文献2の爪では、ハンドに爪を回転させる回転機構が必要となるので、部品点数が増えて構成が複雑になる。また、ワークの姿勢が傾いて供給される場合、ワークの姿勢の検知や回転角度の制御が必要となり、センサ、コントローラが必要で、構成が複雑になる。
【0005】
本発明の目的は、簡単な構成で、搬送台に対して僅かに傾いた円筒形状のワーク、異径の円筒形状のワークも安定してピックアップすることができるハンドおよびこれを備えた部品供給システムを提供する。
【課題を解決するための手段】
【0006】
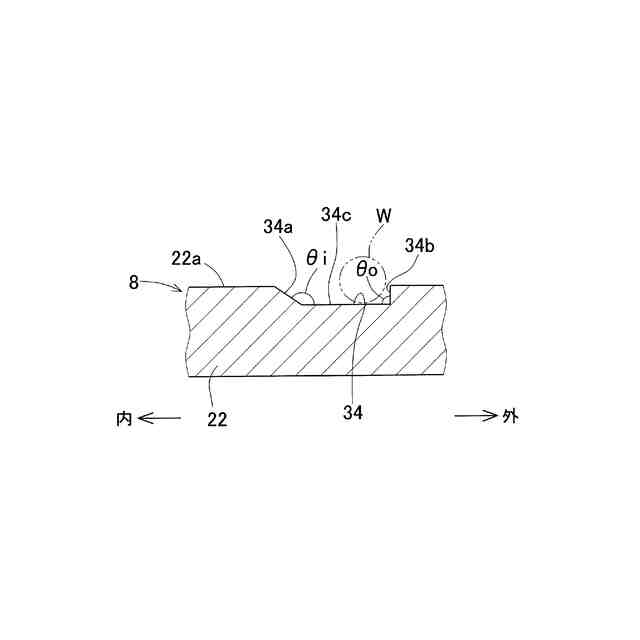
本発明のハンドは、ワークを把持する又は離す把持部と、前記把持部の姿勢を変更するアクチュエータとを有する。前記把持部は、開閉方向に移動して前記ワークを把持する又は離す一対の爪を有している。前記爪は、基端部で前記把持部に前記開閉方向に移動可能に支持され、前記把持部から長手方向に延び、その先端部に前記ワークを把持する把持面を有している。前記把持面は、その長手方向の基端側の端部から長手方向の先端側に向かって前記開閉方向における前記ワークを離す開方向に傾斜して延びる第1の傾斜面と、その長手方向の先端側の端部から長手方向の基端側に向かって前記開閉方向における前記ワークを離す開方向に傾斜して延びて前記第1の傾斜面に連なる第2の傾斜面とを有している。前記長手方向と前記開閉方向に直交する直交方向から見て、前記第2の傾斜面を先端側に延長した先端側の仮想線と前記搬送台の水平な搬送面とのなす先端側角度αが、前記第1の傾斜面を基端側に延長した基端側の仮想線と前記搬送面に平行な平行線とのなす基端側角度βよりも小さく設定されている(α<β)。
【0007】
この構成によれば、先端側角度αを小さくすることで、搬送台に対して僅かに傾いたワークをすくい上げやすくなる。また、基端側角度βを大きくすることで、第1の傾斜面と第2の傾斜面とのなす傾斜角度γが大きくなる。これにより、爪の4つの傾斜面と円筒形状のワークとの接線が第1の傾斜面と第2の傾斜面の連結部に近くなる。そのため、円筒形状のワークの径が大きくなっても、4つの面が接平面となるようにピックアップできる。したがって、異径の円筒形状のワークでも安定してピックアップできる。このように、搬送台に対して水平に置かれた円筒形状のワークだけでなく、搬送台に対して僅かに傾いた円筒形状のワーク、異径の円筒形状のワークも安定してピックアップすることができる。また、爪の回転機構、ワークの姿勢を検知するセンサ等が不要であるので、構成も簡単である。
【0008】
この場合、先端側角度αが25°以上で30°以下に設定され、基端側角度βが50°よりも大きく60°よりも小さく設定されていてもよい。つまり、25°≦α≦30°で、50°<β<60°であってもよい。先端側角度αが25°より小さいと、先端部が薄くなり、剛性が低下する。また、先端側角度αが30°を超えると、搬送台に対して僅かに傾いたワークをすくい上げにくい。基端側角度βは、傾斜角度γが円筒形状のワークの外径に適合するように設定される。シミュレーションにより、基端側角度βを50°よりも大きく60°よりも小さく設定することで、所望の外径の円筒形状のワークを安定してピックアップできることが確認された。
【0009】
本発明において、前記第1の傾斜面および前記第2の傾斜面の少なくとも一方の面の摩擦係数が0.2以下に設定されていてもよい。これにより、ワークが傾斜面に沿って動きやすくなり、搬送台に対して僅かに傾いた円筒形状のワークを、4つの面が接平面となる安定した位置で把持することができる。
【0010】
本発明の部品供給システムは、前記ワークを搬送台に供給する部品供給装置と、前記搬送台が配置された第1のエリアから該第1のエリアとは異なる第2のエリアに前記ワークを搬送するロボットと、前記ロボットのアームの先端に取り付けられて、前記第1のエリアで前記搬送台上の前記ワークをピックアップし、前記第2のエリアで前記ワークを置く本発明のハンドとを備えている。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
NTN株式会社
軸受装置の製造方法および軸受装置
今日
株式会社不二越
ロボット
8日前
個人
けがき用治具
10日前
個人
深孔スリーブ駆動ロッド構造
今日
株式会社不二越
ロボット操作装置
7日前
川崎重工業株式会社
ロボット
8日前
個人
バール
今日
株式会社黒澤鉄工製作所
けがき用治具
10日前
株式会社デンソー
操縦桿
8日前
梅馨堂合同会社
人協働ロボットシステム
2日前
ARMA株式会社
UI付エンドエフェクタ
3日前
若井ホールディングス株式会社
レンチ構造とその製造方法
10日前
株式会社マキタ
作業機
7日前
三菱電機株式会社
トルク締め個所検出システム
今日
高丸工業株式会社
ロボット操作システムの動作方法
今日
シブヤパッケージングシステム株式会社
物品移載装置
8日前
株式会社デンソー
作業装置および作業プログラム
8日前
株式会社ベッセル工業
インパクト工具
8日前
JUKI株式会社
ハンドリング装置
2日前
株式会社デンソー
解体装置および解体プログラム
8日前
株式会社バイナス
ロボット可搬装置を有する自律走行搬送システム
14日前
株式会社SUBARU
ボルトの電動締結工具
3日前
元烽企業有限公司
炉芯管保持装置
4日前
株式会社マキタ
作業機システムおよび作業機
10日前
セイコーエプソン株式会社
ロボットおよびロボットシステム
3日前
東京ロボティクス株式会社
物体操作方法、ロボット及びプログラム
今日
FSテクニカル株式会社
ハンマー系作業システム
11日前
株式会社不二越
入出力信号保持装置及び入出力信号保持装置システム
2日前
川崎重工業株式会社
指令値送信装置、制御システム、及び、指令値送信方法
今日
川崎重工業株式会社
教示支援装置、教示支援方法及び教示支援プログラム
8日前
川崎重工業株式会社
教示支援装置、教示支援方法及び教示支援プログラム
8日前
川崎重工業株式会社
教示支援装置、教示支援方法及び教示支援プログラム
8日前
川崎重工業株式会社
教示支援装置、教示支援方法及び教示支援プログラム
8日前
オムロン株式会社
経路計画装置、方法、及びプログラム
8日前
国立大学法人九州工業大学
把持装置、把持システムおよび把持装置の制御方法
7日前
セイコーエプソン株式会社
ロボットの制御方法およびロボットシステム
1日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ