TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025038821
公報種別
公開特許公報(A)
公開日
2025-03-19
出願番号
2023145663
出願日
2023-09-07
発明の名称
運転支援装置
出願人
株式会社SOKEN
,
株式会社デンソー
代理人
弁理士法人ゆうあい特許事務所
主分類
G08G
1/16 20060101AFI20250312BHJP(信号)
要約
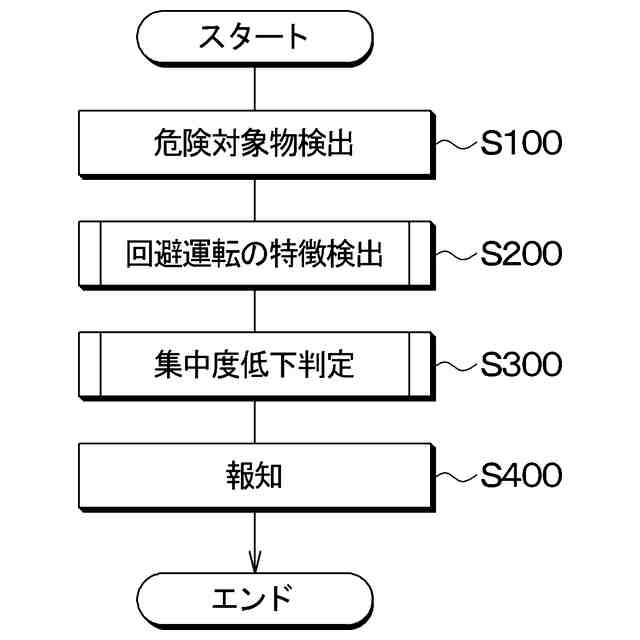
【課題】ドライバの運転に対する集中度の低下を高精度に判定可能な運転支援装置を提供する。
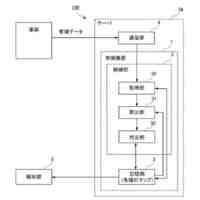
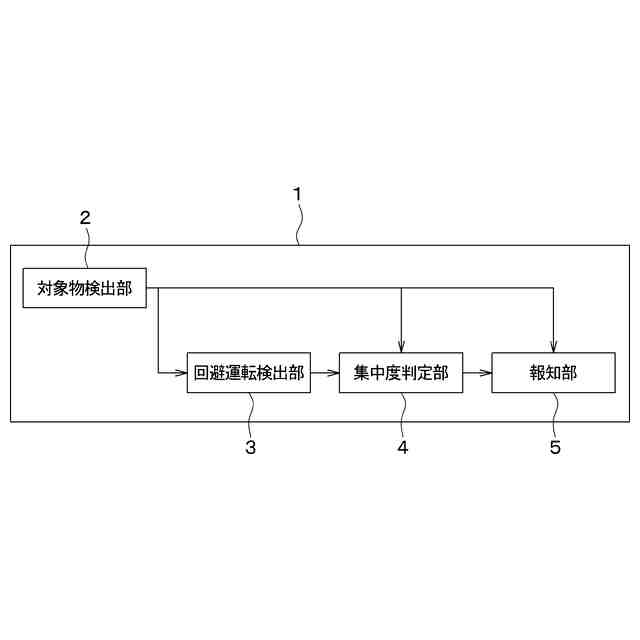
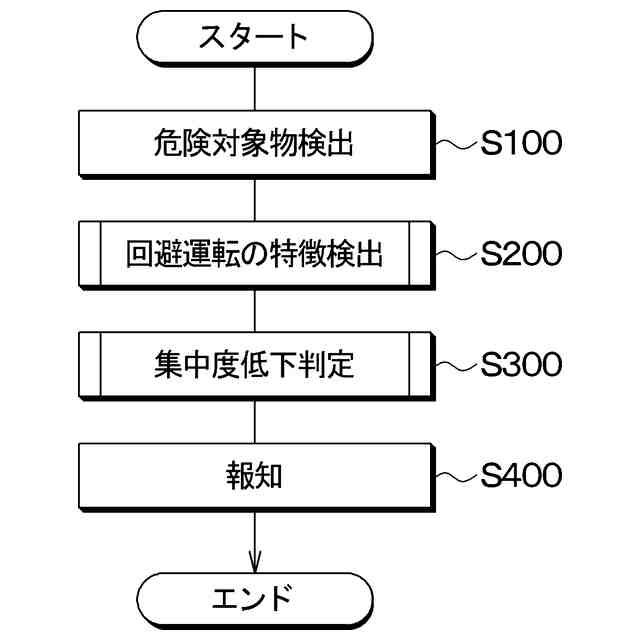
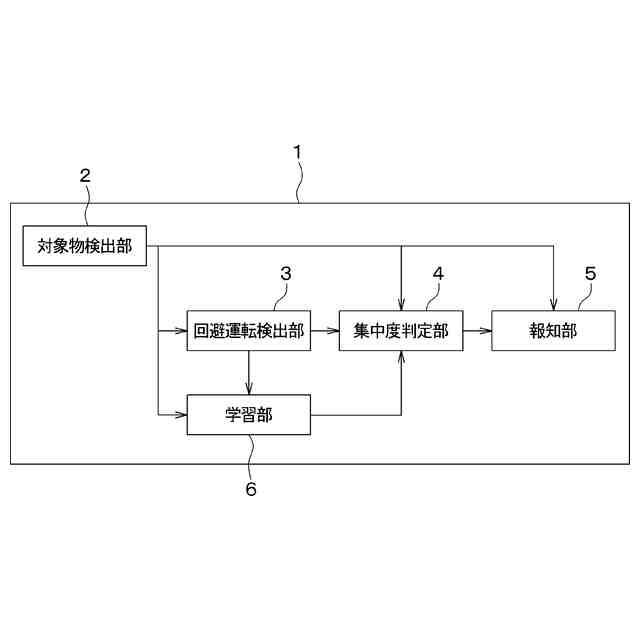
【解決手段】対象物検出部2は、自車両10の進路11およびその進路11の周囲に、事故を引き起こす危険性のある危険対象物13、15を検出する。回避運転検出部3は、その危険対象物13、15に自車両10が接近し通過するときにドライバが事故の危険性を回避するように運転操作を行う回避運転の特徴を検出する。集中度判定部4は、回避運転検出部3が検出したドライバの回避運転の特徴に基づいてドライバの運転に対する集中度を判定する。集中度判定部4がドライバの運転に対する集中度が低下していると判定した場合、報知部5は安全運転を促す報知を行う。
【選択図】図4
特許請求の範囲
【請求項1】
運転支援装置において、
自車両(10)の進路(11)および前記進路の周囲(12、16)に、事故を引き起こす危険性のある危険対象物(13、15)を検出する対象物検出部(2)と、
前記対象物検出部が検出した前記危険対象物に前記自車両が接近し通過するときにドライバが事故の危険性を回避するように運転操作を行う回避運転の特徴を検出する回避運転検出部(3)と、
前記回避運転検出部が検出した前記ドライバの回避運転の特徴に基づいて前記ドライバの運転に対する集中度を判定する集中度判定部(4)と、
前記集中度判定部が前記ドライバの運転に対する集中度が低下していると判定した場合、安全運転を促す報知を行う報知部(5)と、を備える運転支援装置。
続きを表示(約 1,300 文字)
【請求項2】
平常時における前記ドライバの回避運転の特徴を学習する学習部(6)をさらに備え、
前記集中度判定部は、前記学習部が学習した前記平常時における前記ドライバの回避運転の特徴と、前記回避運転検出部が検出した前記ドライバの回避運転の特徴とを比較して、前記ドライバの運転に対する集中度が低下していることを判定する、請求項1に記載の運転支援装置。
【請求項3】
前記学習部は、前記ドライバの回避運転の特徴が所定の基準を満たさない場合、その時の前記ドライバの回避運転の特徴を学習に反映せず、前記ドライバの回避運転の特徴が所定の基準を満たす場合、その時の前記ドライバの回避運転の特徴を学習に反映する、請求項2に記載の運転支援装置。
【請求項4】
前記集中度判定部は、前記危険対象物に対する前記ドライバの回避運転の特徴に加えて、前記自車両が前記危険対象物に近づいたときの前記ドライバの前記危険対象物に対する視線に基づいて前記ドライバの集中度低下を判定する、請求項1ないし3のいずれか1つに記載の運転支援装置。
【請求項5】
前記集中度判定部は、「前記ドライバの運転に対する集中度が低下中である」との判定結果を所定時間保持し、
前記集中度判定部が「前記ドライバの運転に対する集中度が低下中である」との判定結果を保持している場合、前記対象物検出部が前記危険対象物を検出すると、前記報知部は前記自車両が前記危険対象物を通過する前に安全運転を促す報知を行う、請求項1ないし3のいずれか1つに記載の運転支援装置。
【請求項6】
前記集中度判定部は、
前記回避運転検出部が検出した前記ドライバの回避運転の特徴が、前記学習部が学習した前記ドライバの回避運転の特徴を満たさないとする判定が、複数回に設定された所定回数(X)以上連続した場合、「前記ドライバの運転に対する集中度が低下中である」との判定結果を保持し、
前記回避運転検出部が検出した前記ドライバの回避運転の特徴が、前記学習部が学習した前記ドライバの回避運転の特徴を満たすとする判定が、複数回に設定された所定回数(Y)以上連続した場合、「前記ドライバの運転に対する集中度が低下中ではない」との判定結果を保持し、
前記集中度判定部が「前記ドライバの運転に対する集中度が低下中である」との判定結果を保持している場合、前記対象物検出部が前記危険対象物を検出すると、前記報知部は前記自車両が前記危険対象物を通過する前に安全運転を促す報知を行う、請求項2または3のいずれか1つに記載の運転支援装置。
【請求項7】
前記ドライバの回避運転の特徴は、前記危険対象物の手前で前記ドライバが制動を開始したときの衝突余裕時間(TTC)である、請求項1ないし3のいずれか1つに記載の運転支援装置。
【請求項8】
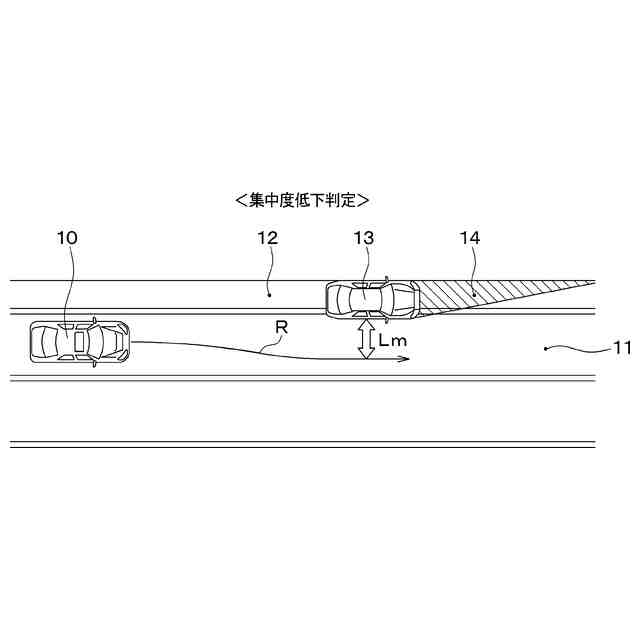
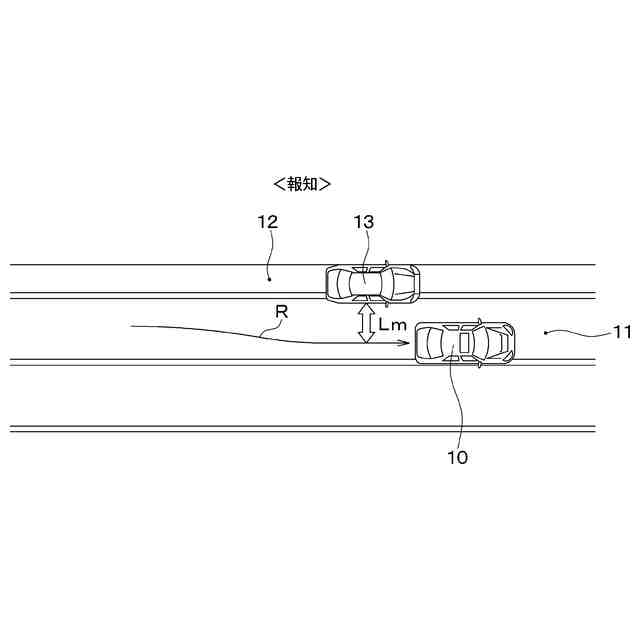
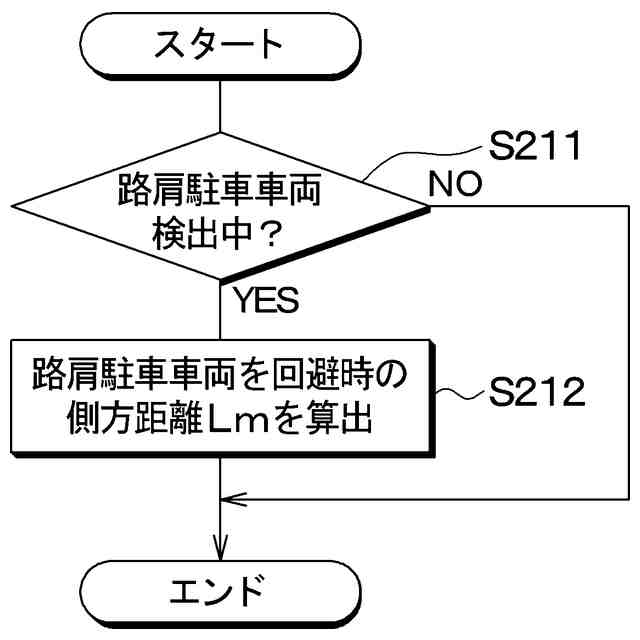
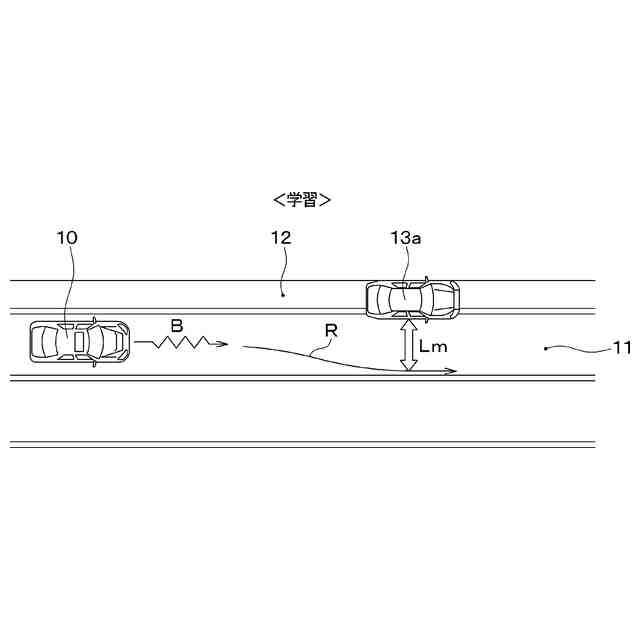
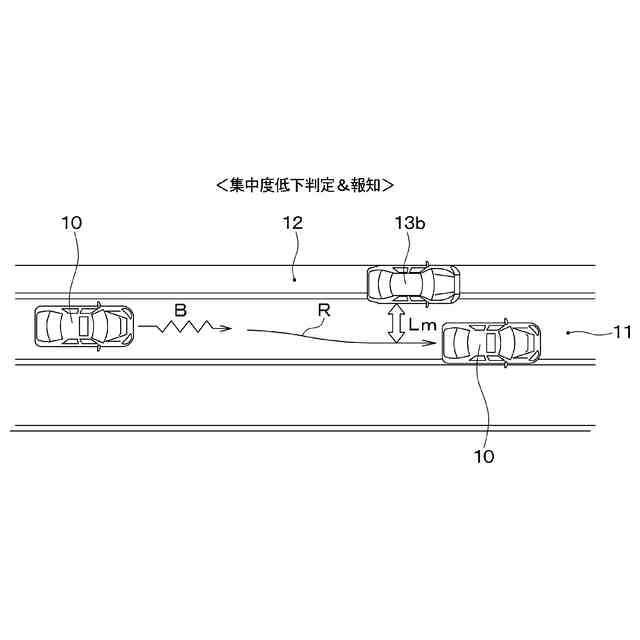
前記ドライバの回避運転の特徴は、前記自車両が前記危険対象物の横を通過するときの前記自車両と前記危険対象物との側方距離(Lm)である、請求項1ないし3のいずれか1つに記載の運転支援装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、ドライバの運転を支援する運転支援装置に関するものである。
続きを表示(約 3,800 文字)
【背景技術】
【0002】
運転支援装置の一例として、特許文献1には、ドライバの意識レベルなどを検知し、状況に応じてドライバに警報を発する警報システムが記載されている。この運転支援装置は、車載カメラ等により撮影したドライバの顔の映像を画像処理し、瞬き時の瞼の開閉時間の変化または視線の向く方向を検出し、わき見状態に基づいてドライバの意識レベルを検知する。
【先行技術文献】
【特許文献】
【0003】
特開2003-317197号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、発明者らの詳細な検討の結果、特許文献1に記載の運転支援装置には次の問題があることが見出された。
(i)車載カメラを用いた画像処理では、ドライバが視線を向けている対象物を安定して検出できないことがある。特に、ドライバが視線を遠方に向けるほど、ドライバが具体的に何を見ているのか判断が困難になる。
(ii)ドライバの視線の向く方向に、事故を引き起こす危険性のある対象物(以下、「危険対象物」という)が存在する場合でも、ドライバがその方向をぼんやりと眺めているだけで、危険対象物として認識していないことがある。
(iii)ドライバが視線の方向にある危険対象物を認知している場合でも、例えばトラブルによる焦り等で、危険対象物を回避するための安全意識が低下していることがある。
【0005】
特許文献1に記載の運転支援装置は、上記(i)、(ii)、(iii)の問題により、ドライバの意識レベル、即ち、運転に対する集中度の低下を正確に検出できず、安全運転を促す報知を有効に行えない恐れがある。
【0006】
本開示は上記点に鑑みて、ドライバの運転に対する集中度の低下を高精度に判定可能な運転支援装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
本開示の1つの観点によると、運転支援装置は、
自車両(10)の進路(11)および進路の周囲(12、16)に、事故を引き起こす危険性のある危険対象物(13、15)を検出する対象物検出部(2)と、
対象物検出部が検出した危険対象物に自車両が接近し通過するときにドライバが事故の危険性を回避するように運転操作を行う回避運転の特徴を検出する回避運転検出部(3)と、
回避運転検出部が検出したドライバの回避運転の特徴に基づいてドライバの運転に対する集中度を判定する集中度判定部(4)と、
集中度判定部がドライバの運転に対する集中度が低下していると判定した場合、安全運転を促す報知を行う報知部(5)と、を備える。
【0008】
これによれば、本開示の運転支援装置は、自車両に事故を引き起こす危険性のある対象物(即ち、危険対象物)をドライバの運転操作によって回避する回避運転の特徴に基き、ドライバの運転に対する集中度を判定する。そのため、上記特許文献1のようなドライバの表情または視線のみに基づいてドライバの運転に対する集中度を判定する手法に比べて、本開示の運転支援装置は、ドライバの運転に対する集中度の低下を高精度に判定できる。例えば、本開示の運転支援装置は、ドライバの目に危険対象物が映っているが、ぼんやりと眺めているだけで危険対象物として認識していない場合でも、ドライバの運転に対する集中度の低下を判定できる。また、例えば、本開示の運転支援装置は、例えば、ドライバが危険対象物として認知しているが、焦り等で安全意識が低下している場合でも、ドライバの運転に対する集中度の低下を判定できる。したがって、本開示の運転支援装置は、安全運転を促す報知をドライバが納得できるものとして、その報知に対してドライバが感じる煩わしさを低減し、ドライバに対し有効に安全運転を促すことができる。
【0009】
なお、各構成要素等に付された括弧付きの参照符号は、その構成要素等と後述する実施形態に記載の具体的な構成要素等との対応関係の一例を示すものである。
【図面の簡単な説明】
【0010】
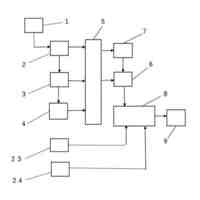
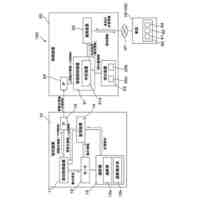
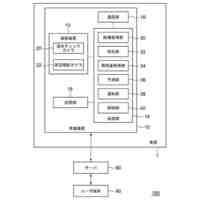
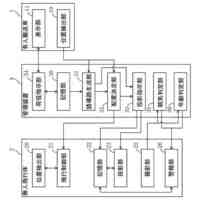
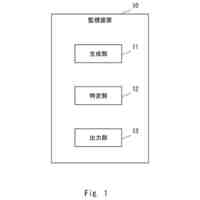
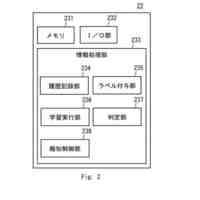
第1実施形態に係る運転支援装置の概略構成を示すブロック図である。
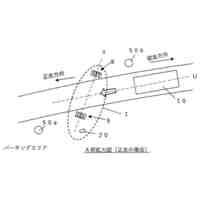
第1実施形態に係る運転支援装置において自車両が路肩駐車車両に接近し通過する際に、集中度低下判定が実行される様子を説明する説明図である。
図2に続き自車両が路肩駐車車両を通過する際に、報知が実行される様子を説明する説明図である。
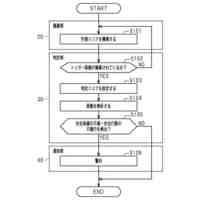
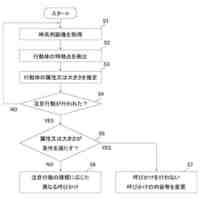
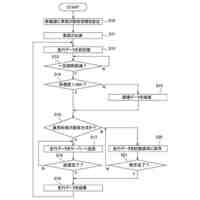
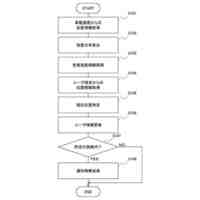
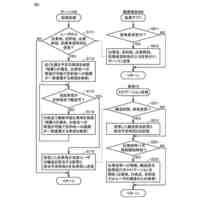
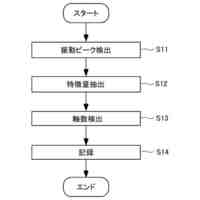
第1実施形態に係る運転支援装置が実行するアルゴリズムを示すフローチャートである。
図4のS200の処理を示すフローチャートである。
図4のS300の処理を示すフローチャートである。
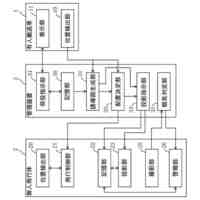
第2実施形態に係る運転支援装置の概略構成を示すブロック図である。
第2実施形態に係る運転支援装置において自車両が路肩駐車車両に接近し通過する際に、ドライバの回避運転の特徴が学習される様子を説明する説明図である。
図8とは別のシーンにて、自車両が別の路肩駐車車両に接近し通過する際に、集中度低下の判定および報知が実行される様子を説明する説明図である。
第2実施形態に係る運転支援装置が実行するアルゴリズムを示すフローチャートである。
図10のS200の処理を示すフローチャートである。
図10のS300の処理を示すフローチャートである。
図10のS500の処理を示すフローチャートである。
第3実施形態に係る運転支援装置において自車両が路肩駐車車両に接近する際に、ドライバの回避運転の特徴が学習される様子を説明する説明図である。
図14とは別のシーンにて、自車両が別の路肩駐車車両に接近する際に、集中度低下の判定および報知が実行される様子を説明する説明図である。
第3実施形態に係る運転支援装置が実行するアルゴリズムを示すフローチャートである。
図16のS200の処理を示すフローチャートである。
図16のS300の処理を示すフローチャートである。
図16のS500の処理を示すフローチャートである。
第4実施形態に係る運転支援装置において自車両の進路の周囲に横断歩行者が存在する際に、ドライバの回避運転の特徴が学習される様子を説明する説明図である。
図20とは別のシーンにて、自車両の進路の周囲に別の横断歩行者が存在する際に、集中度低下の判定および報知が実行される様子を説明する説明図である。
第4実施形態に係る運転支援装置が実行するアルゴリズムを示すフローチャートである。
図22のS200の処理を示すフローチャートである。
図22のS300の処理を示すフローチャートである。
図22のS500の処理を示すフローチャートである。
第5実施形態に係る運転支援装置において自車両が路肩駐車車両に接近し通過する際に、集中度低下判定が実行される様子を説明する説明図である。
図26に続き自車両が路肩駐車車両を通過する際に、報知が実行される様子を説明する説明図である。
第5実施形態に係る運転支援装置が実行するアルゴリズムを示すフローチャートである。
図28のS200の処理を示すフローチャートである。
図28のS300の処理を示すフローチャートである。
第6実施形態に係る運転支援装置において自車両の進路の周囲に横断歩行者が存在する際に、ドライバの回避運転の特徴が学習される様子を説明する説明図である。
図31とは別のシーンにて、自車両の進路の周囲に別の横断歩行者が存在する際に、集中度低下の判定および報知が実行される様子を説明する説明図である。
図31および図32とは別のシーンにて、自車両の進路の周囲に別の横断歩行者が存在する際に、報知が実行される様子を説明する説明図である。
図31および図32とは別のシーンにて、自車両が路肩駐車車両に接近する際に、報知が実行される様子を説明する説明図である。
第6実施形態に係る運転支援装置が実行するアルゴリズムを示すフローチャートである。
図35のS300の処理を説明するための状態遷移図である。
第7実施形態に係る運転支援装置において自車両が路肩駐車車両に接近し通過する際に、ドライバの回避運転の特徴が学習される様子を説明する説明図である。
図37とは別のシーンにて、自車両が別の路肩駐車車両に接近し通過する際に、集中度低下の判定および報知が実行される様子を説明する説明図である。
図37および図38とは別のシーンにて、自車両の進路の周囲に横断歩行者が存在する際に、報知が実行される様子を説明する説明図である。
図37および図38とは別のシーンにて、自車両が別の路肩駐車車両に接近する際に、報知が実行される様子を説明する説明図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
安全運転車両
1か月前
個人
自動車ケアフル灯
1か月前
能美防災株式会社
発信機
1か月前
個人
逆走・正走車両検出システム
10日前
日本信号株式会社
情報提供システム
9日前
ホーチキ株式会社
監視システム
1か月前
個人
磁気・光学誘導路線による車両の運行制御
3日前
株式会社JVCケンウッド
通知システム
1か月前
タック株式会社
安全監視システム
1か月前
株式会社アジラ
注目行動呼びかけシステム
1か月前
三菱ロジスネクスト株式会社
搬送システム
1か月前
三菱ロジスネクスト株式会社
搬送システム
1か月前
三菱ロジスネクスト株式会社
搬送システム
1か月前
トヨタ自動車株式会社
配車システム
2日前
三菱ロジスネクスト株式会社
搬送システム
1か月前
トヨタ自動車株式会社
車両
1か月前
能美防災株式会社
非常報知システム
17日前
東亜電子工業株式会社
警報コントローラ
25日前
愛知時計電機株式会社
生活データ集計装置
1か月前
矢崎総業株式会社
路面監視装置
1か月前
パナソニックIPマネジメント株式会社
火災警報器
1か月前
トヨタ自動車株式会社
配車装置
9日前
日本電気株式会社
監視装置、監視方法、及びプログラム
27日前
個人
除排雪判断支援システムおよびプログラム、道路管理方法
1か月前
トヨタ自動車株式会社
情報処理装置
1か月前
トヨタ自動車株式会社
情報処理装置
1か月前
トヨタ自動車株式会社
情報処理装置
1か月前
トヨタ自動車株式会社
情報処理装置
1か月前
株式会社JVCケンウッド
情報処理装置及び情報処理方法
1か月前
株式会社JVCケンウッド
吸着デバイス及び吸着システム
17日前
いすゞ自動車株式会社
システム
1か月前
株式会社NTTドコモ
予測装置
18日前
トヨタ自動車株式会社
配車システム
25日前
オンキヨー株式会社
車軸数検出システム、及び、車軸数検出方法
24日前
能美防災株式会社
加煙試験器
1か月前
京セラ株式会社
制御装置及び制御方法
9日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ