TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025038617
公報種別
公開特許公報(A)
公開日
2025-03-19
出願番号
2023145342
出願日
2023-09-07
発明の名称
作業システム
出願人
株式会社オカムラ
,
モーションリブ株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
B25J
3/00 20060101AFI20250312BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】修練度に関わらず遠隔操作の早期の慣熟が可能になる作業システムを提供する。
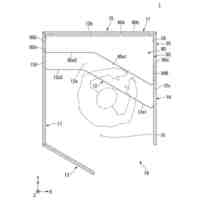
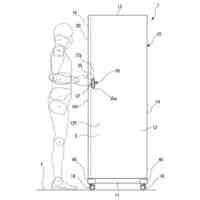
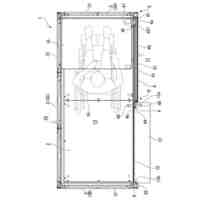
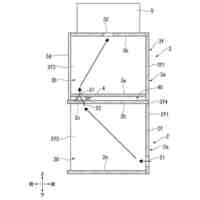
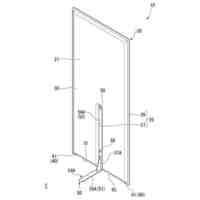
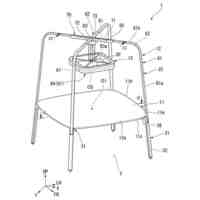
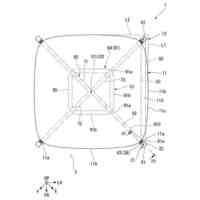
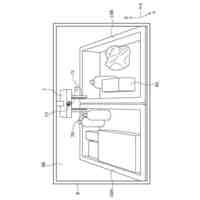
【解決手段】操作者によるマスタ側デバイス4の操作がスレーブ側デバイス5に伝えられることにより、対象物に対してピックアンドプレース工程を行うことが可能な作業システムであって、マスタ側デバイス4の近傍には、スレーブ側デバイス5を構成するハンド部7が配置された作業領域を示す作業画面80を表示する表示手段8を備え、作業画面80には、マスタ側デバイス4を構成する操作部6の位置情報がリアルタイムで反映される仮想位置表示Mが表示される。
【選択図】図6
特許請求の範囲
【請求項1】
操作者によるマスタ側デバイスの操作がスレーブ側デバイスに伝えられることにより、対象物に対してピックアンドプレース工程を行うことが可能な作業システムであって、
前記マスタ側デバイスの近傍には、前記スレーブ側デバイスを構成するハンド部が配置された作業領域を示す作業画面を表示する表示手段を備え、
前記作業画面には、前記マスタ側デバイスを構成する操作部の位置情報がリアルタイムで反映される仮想位置表示が表示されることを特徴とする作業システム。
続きを表示(約 500 文字)
【請求項2】
前記作業画面には、前記作業領域を簡易的に表現する位置表示画面が小窓表示され、前記位置表示画面に前記仮想位置表示が表示されることを特徴とする請求項1に記載の作業システム。
【請求項3】
前記位置表示画面には、前記操作部の仮想位置表示に加えて、前記ハンド部の位置情報がリアルタイムで反映される仮想位置表示が同時に表示されることを特徴とする請求項2に記載の作業システム。
【請求項4】
前記位置表示画面には、少なくとも直交する2軸の補助線が表示されることを特徴とする請求項2に記載の作業システム。
【請求項5】
前記ハンド部が初期位置にある状態において、前記操作部の仮想位置表示と前記ハンド部の仮想位置表示とは、前記位置表示画面上で同位置に重なって表示されることを特徴とする請求項3に記載の作業システム。
【請求項6】
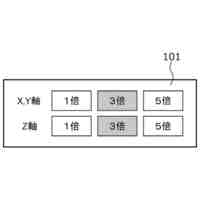
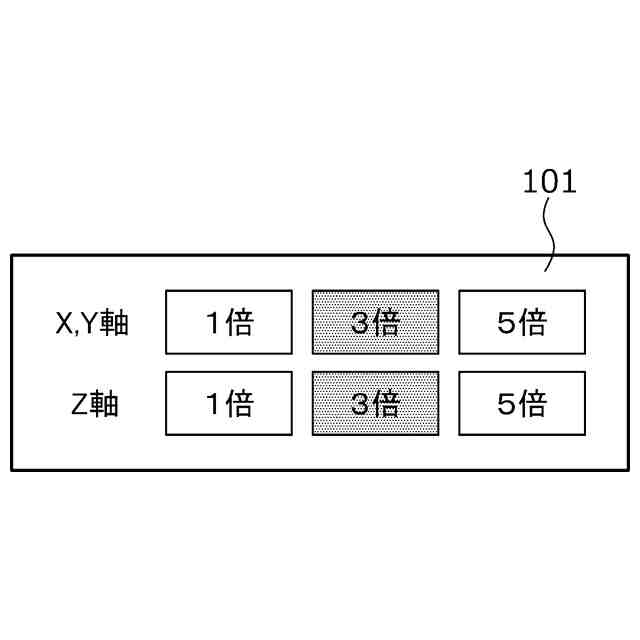
前記作業画面における前記位置表示画面の近傍には、前記操作部の変位量に対する前記ハンド部の移動量の変換倍率を示す倍率表示が表示されることを特徴とする請求項3ないし5のいずれかに記載の作業システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ピックアンドプレース工程の遠隔操作を可能とする作業システムに関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
近年、インターネットを利用した商品購入やサービス利用の普及による電子商取引(EC)市場の拡大を受けて、物流現場においては、物流量の増加や深刻な人手不足等の問題を解決するため、作業ロボットによる物流プロセスの自動化が急ピッチで進められている。
【0003】
特許文献1~3には、マスタ側デバイスの動作をスレーブ側デバイスに伝えるとともに、スレーブ側デバイスに対する物品からの反力の入力をマスタ側デバイスにフィードバックする機能、すなわちバイラテラル制御機能を実現することができる位置・力制御装置が提案されており、人のような繊細な作業を作業ロボットにより実現可能となっている。
【0004】
また、特許文献4には、個別の物品を仕分けるピッキング作業をロボットにより自動化するにあたって、人工知能(AI)では完結できない判断や作業を人(操作者)が作業ロボットを遠隔操作することによりサポートする作業システムが提案されている。特許文献4の作業システムは、スレーブ側に設けられたカメラにより撮影され、マスタ側のディスプレイに表示されるリアルタイム映像における対象物に対して、所定のマーク画像を合成して提示することで、操作者は作業支援が必要な対象物を容易に識別することができ、操作者によるマスタ側デバイスの操作部の操作がスレーブ側デバイスのハンド部に伝えられることにより、対象物に対してピッキング作業を行うことが可能になっている。
【先行技術文献】
【特許文献】
【0005】
特許第4696307号公報(第6頁~第7頁、第1図)
特許第6382203号公報(第8頁~第10頁、第1図)
特許第6598401号公報(第9頁~第11頁、第1図)
特開2018-153874号公報(第5頁~第6頁、第1図)
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献4の作業システムにおいては、スレーブ側デバイスのハンド部により特定の位置にある特定の対象物を摘み上げ、保持した状態で所定の位置まで移送し、そこに対象物を配置するピックアンドプレース工程と呼ばれる一連の作業が主に行われるが、操作者は、スレーブ側デバイスのハンド部の作業領域を撮像したマスタ側のディスプレイに表示されるリアルタイム映像を見ながら、マスタ側デバイスの操作部を操作していると、マスタ側デバイスの操作部を操作する操作感覚と、スレーブ側デバイスのハンド部の移動動作との間で違和感を覚える虞がある。特に修練度の低い操作者にあっては、この違和感が顕著となり、遠隔操作の慣熟に時間を要するという問題があった。
【0007】
本発明は、このような問題点に着目してなされたもので、修練度に関わらず遠隔操作の早期の慣熟が可能になる作業システムを提供することを目的とする。
【課題を解決するための手段】
【0008】
前記課題を解決するために、本発明の作業システムは、
操作者によるマスタ側デバイスの操作がスレーブ側デバイスに伝えられることにより、対象物に対してピックアンドプレース工程を行うことが可能な作業システムであって、
前記マスタ側デバイスの近傍には、前記スレーブ側デバイスを構成するハンド部が配置された作業領域を示す作業画面を表示する表示手段を備え、
前記作業画面には、前記マスタ側デバイスを構成する操作部の位置情報がリアルタイムで反映される仮想位置表示が表示されることを特徴としている。
この特徴によれば、操作者はマスタ側デバイスの操作部を操作する際に、作業画面上に表示される仮想の操作部の位置を確認でき、スレーブ側デバイスのハンド部の移動動作と見比べることで、実際のスレーブ側デバイスのハンド部の移動動作に対してマスタ側デバイスの操作部を操作する操作感覚を適合させやすく、修練度に関わらず遠隔操作の早期の慣熟が可能になる。
【0009】
前記作業画面には、前記作業領域を簡易的に表現する位置表示画面が小窓表示され、前記位置表示画面に前記仮想位置表示が表示されることを特徴としている。
この特徴によれば、作業領域が簡易的に表現された位置表示画面上で仮想の操作部の位置を確認することができるため、操作部の位置情報を把握しやすい。
【0010】
前記位置表示画面には、前記操作部の仮想位置表示に加えて、前記ハンド部の位置情報がリアルタイムで反映される仮想位置表示が同時に表示されることを特徴としている。
この特徴によれば、位置表示画面上で仮想の操作部の位置と、仮想のハンド部の位置を見比べることができるため、実際のスレーブ側デバイスのハンド部の移動動作に対してマスタ側デバイスの操作部を操作する操作感覚を適合させやすい。また、操作部の変位量に対するハンド部の移動量の違いを把握しやすい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社オカムラ
什器
1日前
株式会社オカムラ
什器
1日前
株式会社オカムラ
什器
1か月前
株式会社オカムラ
間仕切
1か月前
株式会社オカムラ
ブース
29日前
株式会社オカムラ
収納庫
2か月前
株式会社オカムラ
ブース
3日前
株式会社オカムラ
ブース
3日前
株式会社オカムラ
ブース
3日前
株式会社オカムラ
連結什器
5日前
株式会社オカムラ
天板付什器
19日前
株式会社オカムラ
天板付什器
1日前
株式会社オカムラ
連結保管庫
1か月前
株式会社オカムラ
パネル装置
1か月前
株式会社オカムラ
搬送用什器
2か月前
株式会社オカムラ
天板付什器
1日前
株式会社オカムラ
天板付什器
1日前
株式会社オカムラ
天板付什器
1日前
株式会社オカムラ
天板付什器
1日前
株式会社オカムラ
天板付什器
1日前
株式会社オカムラ
天板付什器
1日前
株式会社オカムラ
天板付什器
1日前
株式会社オカムラ
天板付什器
1日前
株式会社オカムラ
天板付什器
1日前
株式会社オカムラ
天板付き什器
1日前
株式会社オカムラ
作業システム
1か月前
株式会社オカムラ
作業システム
1か月前
株式会社オカムラ
什器ユニット
16日前
株式会社オカムラ
間仕切り装置
1か月前
株式会社オカムラ
什器システム
1日前
株式会社オカムラ
什器システム
1か月前
株式会社オカムラ
容器収容什器
5日前
株式会社オカムラ
天板付き什器
1日前
株式会社オカムラ
天板昇降式什器
1日前
株式会社オカムラ
天板昇降式什器
1日前
株式会社オカムラ
天板昇降式什器
3日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ