TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025037637
公報種別
公開特許公報(A)
公開日
2025-03-18
出願番号
2023144687
出願日
2023-09-06
発明の名称
計画決定装置および計画決定方法
出願人
日新電機株式会社
,
国立大学法人京都工芸繊維大学
代理人
弁理士法人 HARAKENZO WORLD PATENT & TRADEMARK
主分類
G06Q
10/04 20230101AFI20250311BHJP(計算;計数)
要約
【課題】複数の機器の生産計画を従来よりも適切に決定する。
【解決手段】計画決定装置(1)は、複数の機器の生産計画についての多目的最適化問題を解くことにより、前記生産計画を決定する。前記多目的最適化問題では、決定変数についてのN個の目的関数と、N個の重み係数と、によってグローバル目的関数が定められる。計画決定装置(1)は、前記決定変数についての制約条件の下でN個の前記目的関数のそれぞれの値を最大化する仮の多目的最適化問題を、所定の最適化アルゴリズムを用いて解くことにより、N個の前記目的関数のそれぞれについて影響順位を決定する。次いで、計画決定装置(1)は、前記制約条件の下で前記グローバル目的関数を最大化する前記多目的最適化問題を、前記影響順位に従ってN個の前記重み係数を変化させつつ前記最適化アルゴリズムを用いて漸進的に解くことにより、前記多目的最適化問題の最適解を導出する。
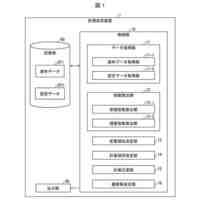
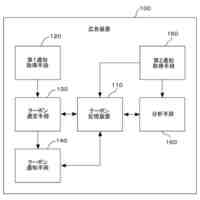
【選択図】図1
特許請求の範囲
【請求項1】
複数の機器の生産計画についての多目的最適化問題を解くことにより、前記生産計画を決定する計画決定装置であって、
前記多目的最適化問題では、(i)決定変数についてのN個の目的関数が定められているとともに、(ii)前記決定変数についての制約条件が定められており、
Nは、2以上の整数であり、
N個の前記目的関数は、N個の重み係数とそれぞれ対応付けられており、
iは、1以上かつN以下の整数であり、
i番目の前記目的関数を、第i目的関数と称し、
i番目の前記重み係数を、第i重み係数と称し、
前記第i目的関数と前記第i重み係数との積を、第i素点と称し、
前記多目的最適化問題におけるグローバル目的関数は、第1素点から第N素点までの和として定められ、
前記計画決定装置は、
前記制約条件の下でN個の前記目的関数のそれぞれの値を最大化する仮の多目的最適化問題を、所定の最適化アルゴリズムを用いて解くことにより、N個の前記目的関数のそれぞれについて、前記制約条件からの影響の受け易さを示す影響順位を決定し、
前記制約条件の下で前記グローバル目的関数を最大化する前記多目的最適化問題を、前記影響順位に従ってN個の前記重み係数を変化させつつ、前記最適化アルゴリズムを用いて漸進的に解くことにより、前記多目的最適化問題の最適解を導出する、計画決定装置。
続きを表示(約 1,200 文字)
【請求項2】
jは、1以上かつN以下の整数であり、
前記計画決定装置は、
N個の前記目的関数の内のある目的関数が前記制約条件からj番目に影響を受け易いことを示す第j影響順位を、前記制約条件の下で前記仮の多目的最適化問題を解くことにより決定し、
前記制約条件の下で前記グローバル目的関数を最大化する前記多目的最適化問題において、前記第j影響順位に対応する第j段階を設定し、
前記第j段階において、N個の前記重み係数のうち、第1影響順位から前記第j影響順位までに対応する重み係数を非零に設定するとともに、第(j+1)影響順位から第N影響順位までに対応する重み係数を0に設定する、請求項1に記載の計画決定装置。
【請求項3】
N個の前記目的関数のそれぞれに対応するN個の閾値が設定されており、
N個の前記閾値のうち、前記第i目的関数に対応する閾値を第i閾値と称し、
前記計画決定装置は、1からNまでの全てのiについて、前記最適解における前記第i目的関数の値が前記第i閾値以上である場合に、前記最適解を最終解として決定する、請求項1または2に記載の計画決定装置。
【請求項4】
前記最終解に対応する前記生産計画を決定する、請求項3に記載の計画決定装置。
【請求項5】
前記最適化アルゴリズムは、遺伝アルゴリズムである、請求項1に記載の計画決定装置。
【請求項6】
複数の機器の生産計画についての多目的最適化問題を解くことにより、前記生産計画を決定する計画決定方法であって、
前記多目的最適化問題では、(i)決定変数についてのN個の目的関数が定められているとともに、(ii)前記決定変数についての制約条件が定められており、
Nは、2以上の整数であり、
N個の前記目的関数は、N個の重み係数とそれぞれ対応付けられており、
iは、1以上かつN以下の整数であり、
i番目の前記目的関数を、第i目的関数と称し、
i番目の前記重み係数を、第i重み係数と称し、
前記第i目的関数と前記第i重み係数との積を、第i素点と称し、
前記多目的最適化問題におけるグローバル目的関数は、第1素点から第N素点までの和として定められ、
前記計画決定方法では、
前記制約条件の下でN個の前記目的関数のそれぞれの値を最大化する仮の多目的最適化問題を、所定の最適化アルゴリズムを用いて解くことにより、N個の前記目的関数のそれぞれについて、前記制約条件からの影響の受け易さを示す影響順位を決定し、
前記制約条件の下で前記グローバル目的関数を最大化する前記多目的最適化問題を、前記影響順位に従ってN個の前記重み係数を変化させつつ、前記最適化アルゴリズムを用いて漸進的に解くことにより、前記多目的最適化問題の最適解を導出する、計画決定方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、複数の機器の生産計画を決定する計画決定装置に関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
各種の産業分野において、数理最適化技術を用いて所定の計画を決定するための様々な手法が開示されている。例えば、下記の特許文献1には、多変数の線形計画問題を解くことによって計画を決定する装置の一構成例が開示されている。線形計画問題は、多目的最適化問題の一類型である。
【先行技術文献】
【特許文献】
【0003】
特開2019-200695号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
本発明の一態様は、複数の機器の生産計画を従来よりも適切に決定することを目的としている。
【課題を解決するための手段】
【0005】
上記の課題を解決するために、本発明の一態様に係る計画決定装置は、複数の機器の生産計画についての多目的最適化問題を解くことにより、前記生産計画を決定する計画決定装置であって、前記多目的最適化問題では、(i)決定変数についてのN個の目的関数が定められているとともに、(ii)前記決定変数についての制約条件が定められており、Nは、2以上の整数であり、N個の前記目的関数は、N個の重み係数とそれぞれ対応付けられており、iは、1以上かつN以下の整数であり、i番目の前記目的関数を、第i目的関数と称し、i番目の前記重み係数を、第i重み係数と称し、前記第i目的関数と前記第i重み係数との積を、第i素点と称し、前記多目的最適化問題におけるグローバル目的関数は、第1素点から第N素点までの和として定められ、前記計画決定装置は、前記制約条件の下でN個の前記目的関数のそれぞれの値を最大化する仮の多目的最適化問題を、所定の最適化アルゴリズムを用いて解くことにより、N個の前記目的関数のそれぞれについて、前記制約条件からの影響の受け易さを示す影響順位を決定し、前記制約条件の下で前記グローバル目的関数を最大化する前記多目的最適化問題を、前記影響順位に従ってN個の前記重み係数を変化させつつ、前記最適化アルゴリズムを用いて漸進的に解くことにより、前記多目的最適化問題の最適解を導出する。
【0006】
また、上記の課題を解決するために、本発明の一態様に係る計画決定方法は、複数の機器の生産計画についての多目的最適化問題を解くことにより、前記生産計画を決定する計画決定方法であって、前記多目的最適化問題では、(i)決定変数についてのN個の目的関数が定められているとともに、(ii)前記決定変数についての制約条件が定められており、Nは、2以上の整数であり、N個の前記目的関数は、N個の重み係数とそれぞれ対応付けられており、iは、1以上かつN以下の整数であり、i番目の前記目的関数を、第i目的関数と称し、i番目の前記重み係数を、第i重み係数と称し、前記第i目的関数と前記第i重み係数との積を、第i素点と称し、前記多目的最適化問題におけるグローバル目的関数は、第1素点から第N素点までの和として定められ、前記計画決定方法では、前記制約条件の下でN個の前記目的関数のそれぞれの値を最大化する仮の多目的最適化問題を、所定の最適化アルゴリズムを用いて解くことにより、N個の前記目的関数のそれぞれについて、前記制約条件からの影響の受け易さを示す影響順位を決定し、前記制約条件の下で前記グローバル目的関数を最大化する前記多目的最適化問題を、前記影響順位に従ってN個の前記重み係数を変化させつつ、前記最適化アルゴリズムを用いて漸進的に解くことにより、前記多目的最適化問題の最適解を導出する。
【発明の効果】
【0007】
本発明の一態様によれば、複数の機器の生産計画を従来よりも適切に決定できる。
【図面の簡単な説明】
【0008】
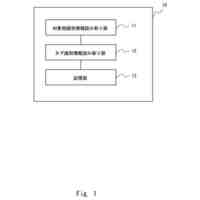
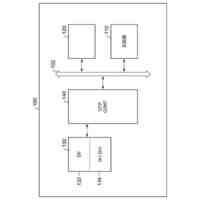
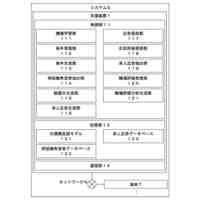
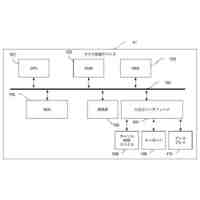
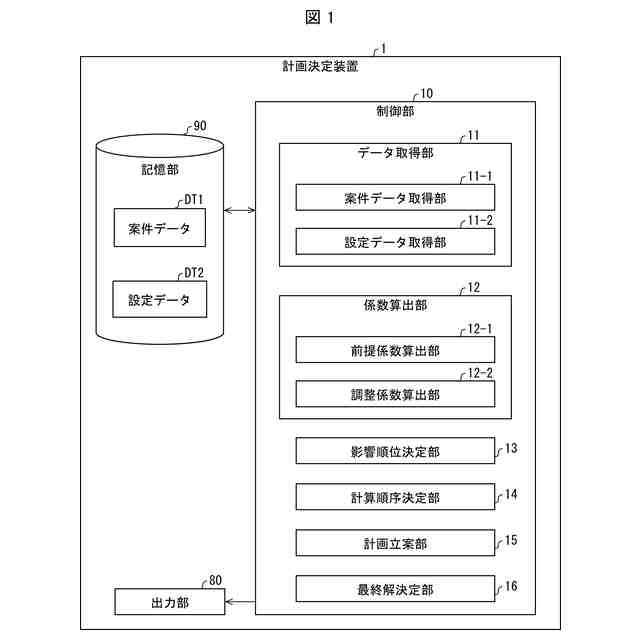
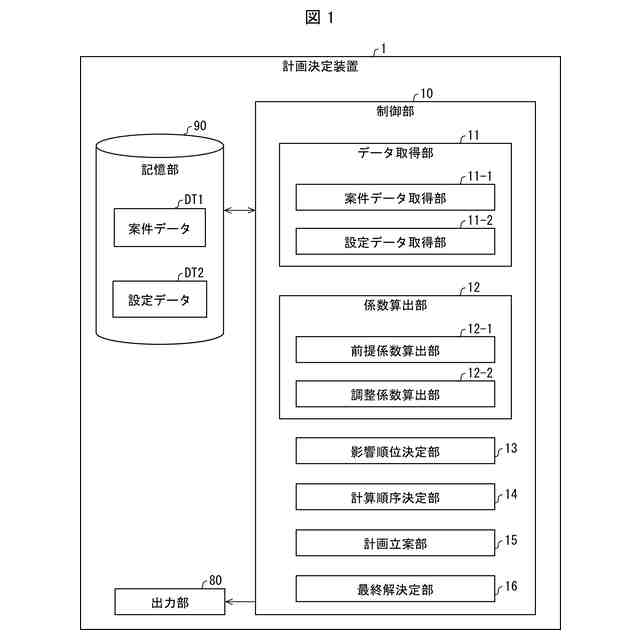
実施形態1における計画決定装置の一構成例を概略的に示す
案件データの例を示す。
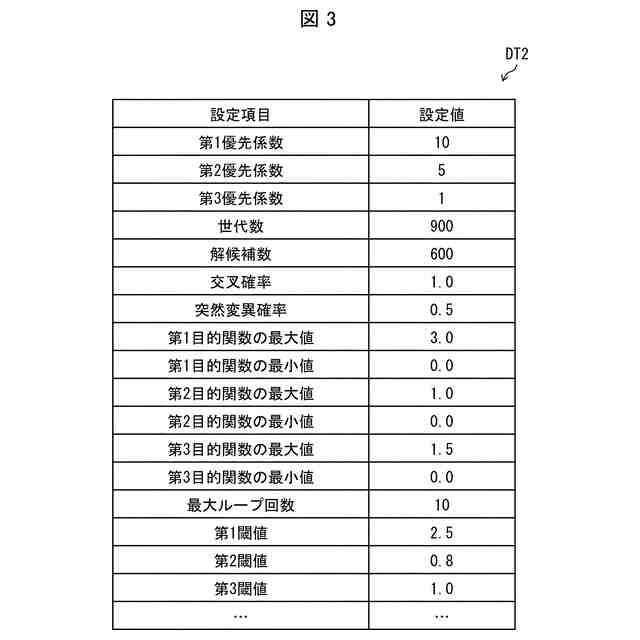
設定データの例を示す。
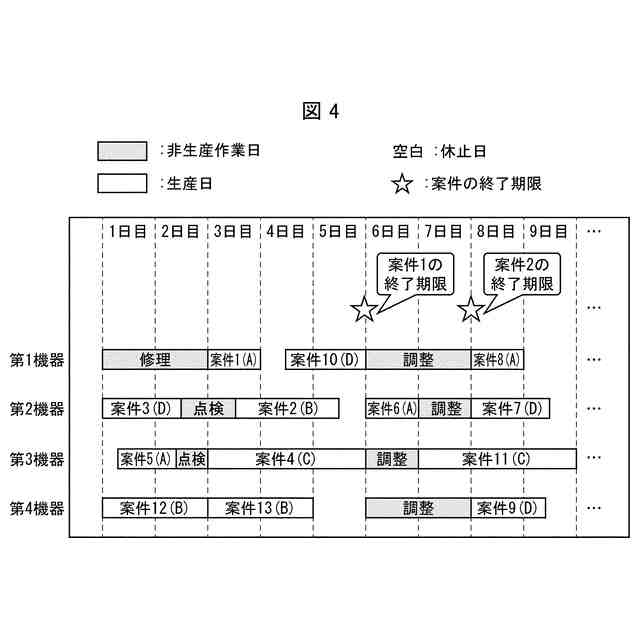
生産計画の初期状態の例を示す。
計画決定装置によって決定された最終生産計画の例を示す。
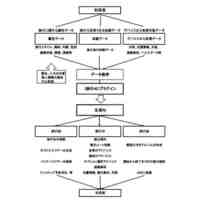
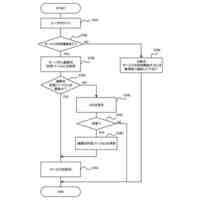
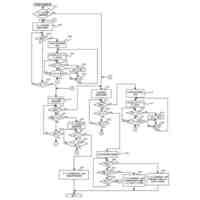
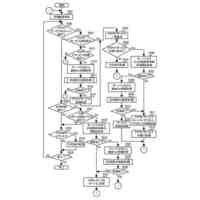
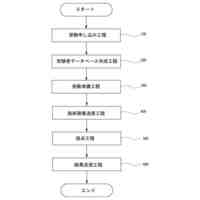
計画決定装置における処理の流れを例示するフローチャートである。
前提係数の算出例を説明するための図である。
計画決定装置による生産計画の立案過程の例を模式的に示す。
【発明を実施するための形態】
【0009】
〔実施形態1〕
実施形態1の計画決定装置1について以下に説明する。説明の便宜上、実施形態1にて説明したコンポーネント(構成要素)と同じ機能を有するコンポーネントについては、以降の各実施形態では同じ符号を付し、その説明を繰り返さない。簡潔化のため、公知の技術事項についても説明を適宜省略する。
【0010】
本明細書において述べる各コンポーネントおよび各数値はいずれも、内容上矛盾のない限り、単なる例示である。それゆえ、内容上矛盾のない限り、例えば各コンポーネントの位置関係および接続関係は各図の例に限定されない。また、各図は必ずしもスケール通りに図示されていない。また、ある図において例示されている日付は、別の図において例示されている日付とは必ずしも一致していない。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日新電機株式会社
密閉処理装置
10日前
日新電機株式会社
電源システム
12日前
日新電機株式会社
遮断器システム
2日前
日新電機株式会社
遮断器システム
9日前
日新電機株式会社
計画決定装置および計画決定方法
19日前
個人
プログラム
1か月前
個人
情報検索システム
11日前
個人
AI旅行最適化プラグイン
1か月前
個人
確率場データ同化演算手法
23日前
キヤノン株式会社
電子機器
10日前
個人
技術実行管理システム
25日前
キヤノン株式会社
電子機器
10日前
キヤノン株式会社
電子機器
10日前
個人
納骨堂システム
1か月前
シャープ株式会社
電子機器
24日前
キヤノン電子株式会社
通信システム
3日前
個人
不動産情報提供システム
20日前
株式会社イノベイト
広告装置
13日前
合同会社IPマネジメント
内部不正対策
18日前
個人
ネイルスキルテストシステム
24日前
トヨタ自動車株式会社
管理システム
5日前
トヨタ自動車株式会社
作業評価装置
3日前
ローム株式会社
半導体集積回路
1か月前
株式会社NURSY
再就職の支援装置
4日前
TDK株式会社
等価回路
5日前
株式会社TIMEWELL
情報処理システム
1か月前
西松建設株式会社
計測システム
9日前
個人
収納装置および収納システム
1か月前
株式会社JVCケンウッド
情報処理装置
24日前
個人
公益寄付インタラクティブシステム
3日前
個人
外国為替証拠金取引定期自動売買システム
16日前
トヨタ自動車株式会社
電池評価システム
1か月前
株式会社サマデイ
メンタリングシステム
25日前
キヤノン株式会社
ワークフロー制御装置
1か月前
個人
生成AI向けデータ保管及び活用システム
1か月前
株式会社ヒニアラタ
障害者支援システム
18日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ