TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025035281
公報種別
公開特許公報(A)
公開日
2025-03-13
出願番号
2023142222
出願日
2023-09-01
発明の名称
表示制御システム、表示制御方法、及びプログラム
出願人
清水建設株式会社
代理人
個人
,
個人
,
個人
主分類
G05D
1/43 20240101AFI20250306BHJP(制御;調整)
要約
【課題】自律移動体装置の現時点以降における移動状況を周囲に的確に報知できるようにする。
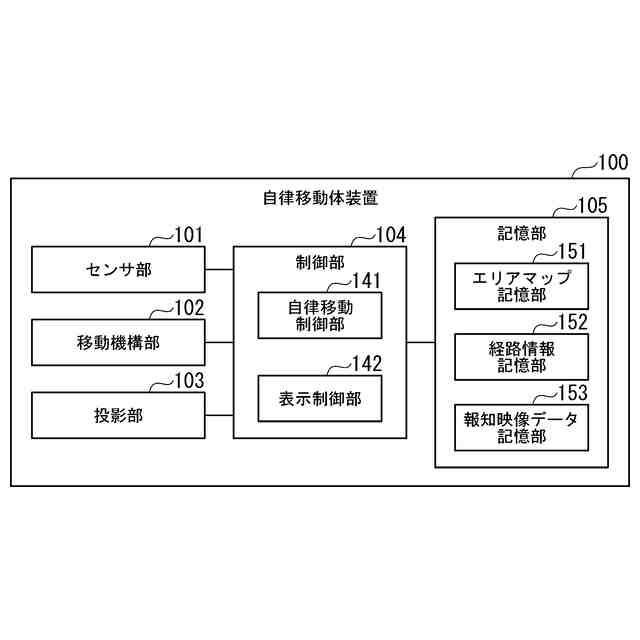
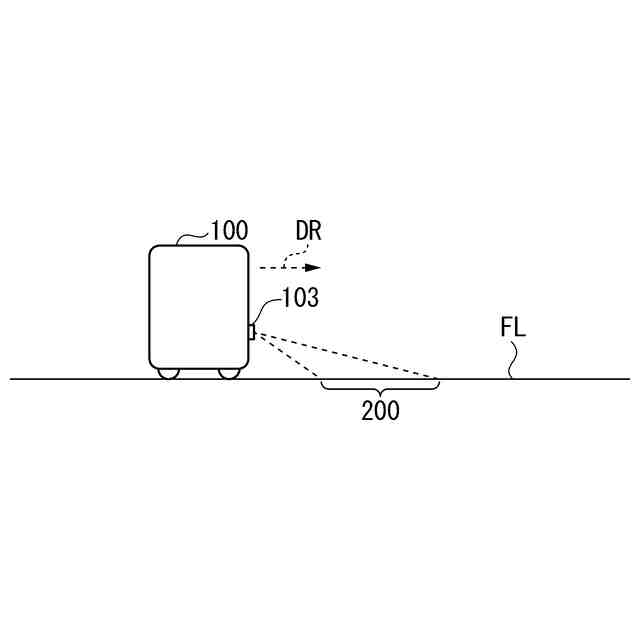
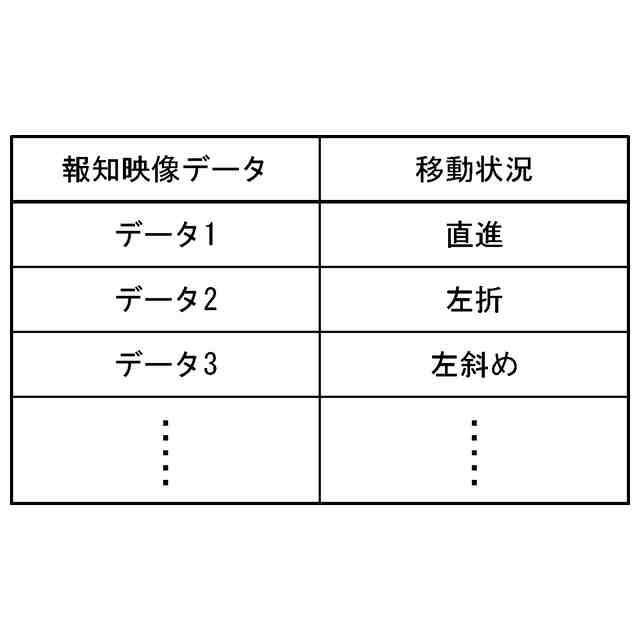
【解決手段】自律移動体装置を自律的に移動させる制御を実行する自律移動制御部と、前記自律移動制御部の制御に基づく現時点以降における前記自律移動体装置の移動に関して報知する映像を、自律移動体装置の前方の移動対象面に映像を投影するように設けられる投影部により投影させる表示制御部とを備えて表示制御システムを構成する。
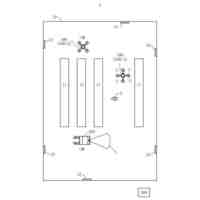
【選択図】図4
特許請求の範囲
【請求項1】
自律移動体装置を自律的に移動させる制御を実行する自律移動制御部と、
前記自律移動制御部の制御に基づく現時点以降における前記自律移動体装置の移動に関して報知する映像を、自律移動体装置の前方の移動対象面に映像を投影するように設けられる投影部により投影させる表示制御部と
を備える表示制御システム。
続きを表示(約 980 文字)
【請求項2】
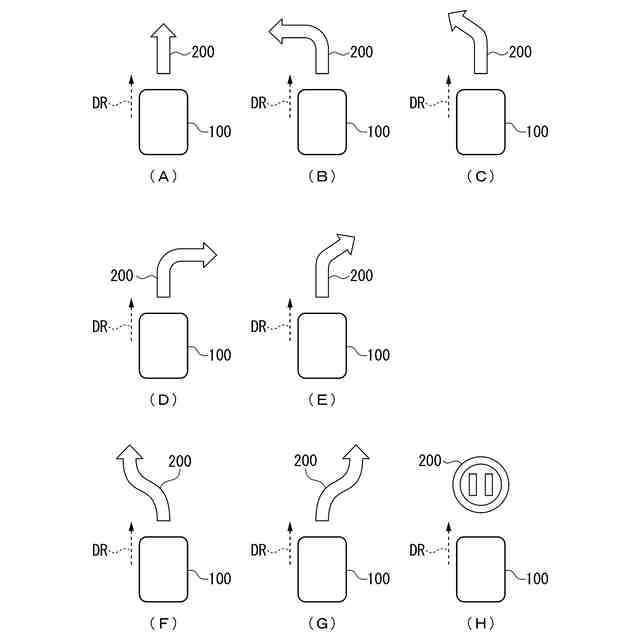
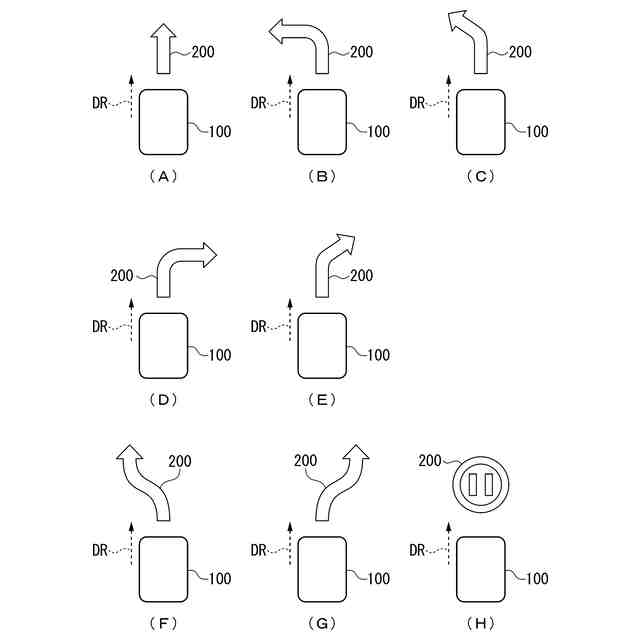
前記表示制御部は、現時点以降における自律移動体装置の移動方向を示す映像を前記投影部に投影させる
請求項1に記載の表示制御システム。
【請求項3】
前記表示制御部は、現時点の自律移動体装置の状態を標示する映像を前記投影部に投影させる
請求項1または2に記載の表示制御システム。
【請求項4】
前記表示制御部は、現時点の自律移動体装置の状態として一時停止している場合に、当該一時停止していることを標示する映像を前記投影部に投影させる
請求項3に記載の表示制御システム。
【請求項5】
前記表示制御部は、現時点の自律移動体装置の状態として一時停止中であって一時停止の解除までの時間が所定以内であることを示す映像を前記投影部に投影させる
請求項4に記載の表示制御システム。
【請求項6】
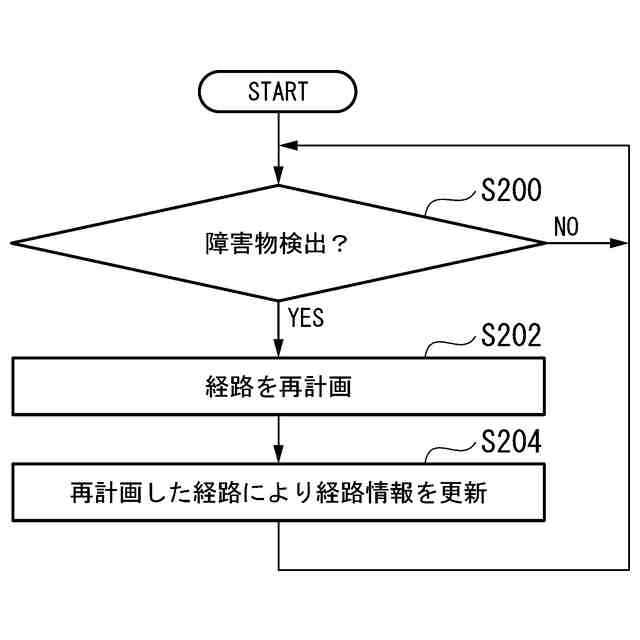
前記自律移動制御部は、前方に障害物を検出したことに応じて前記障害物を回避するように移動経路を設定し、
前記表示制御部は、前記自律移動制御部により設定された移動経路を示す映像を前記投影部に投影させる
請求項1または2に記載の表示制御システム。
【請求項7】
前記表示制御部は、前方に障害物を検出したことに応じて映像の色を変化させる
請求項1または2に記載の表示制御システム。
【請求項8】
表示制御システムにおける表示制御方法であって、
自律移動制御部が自律移動体装置を自律的に移動させる制御を実行する自律移動制御ステップと、
表示制御部が、前記自律移動制御部の制御に基づく現時点以降における前記自律移動体装置の移動に関して報知する映像を、自律移動体装置の前方の移動対象面に映像を投影するように設けられる投影部により投影させる表示制御ステップと
を含む表示制御方法。
【請求項9】
コンピュータを、
自律移動体装置を自律的に移動させる制御に基づく現時点以降における前記自律移動体装置の移動に関して報知する映像を、自律移動体装置の前方の移動対象面に映像を投影するように設けられる投影部により投影させる表示制御部
として機能させるためのプログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、表示制御システム、表示制御方法、及びプログラムに関する。
続きを表示(約 1,100 文字)
【背景技術】
【0002】
無人搬送車AGV(Automatic Guided Vehicle)に取り付けられたレーザースキャナのセンシング領域に対応する矩形状の範囲を、照光表示装置により床面に表示するようにされた技術が知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2021-053801号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
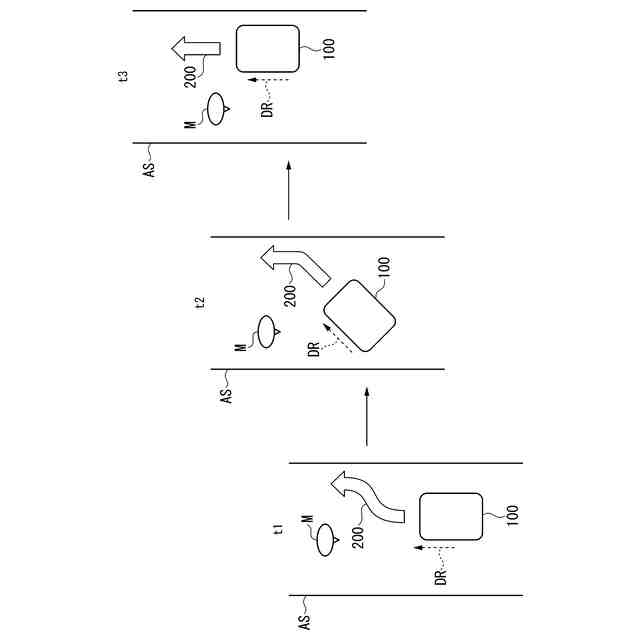
自律的に移動が可能な自律移動体装置と人が共存する環境において、両者が互いの進行を妨げることのない円滑な協調を実現するためには、現時点以降において自律移動体装置がどのように移動するのかを周囲に的確に報知できるようにすることが好ましい。
【0005】
本発明は上記に記載の課題を考慮して、自律移動体装置の現時点以降における移動状況を周囲に的確に報知できるようにすることを目的とする。
【課題を解決するための手段】
【0006】
(1)上述した課題を解決する本発明の一態様は、自律移動体装置を自律的に移動させる制御を実行する自律移動制御部と、前記自律移動制御部の制御に基づく現時点以降における前記自律移動体装置の移動に関して報知する映像を、自律移動体装置の前方の移動対象面に映像を投影するように設けられる投影部により投影させる表示制御部とを備える表示制御システムである。
【0007】
(2)本発明の一態様は、(1)に記載の表示制御システムであって、前記表示制御部は、現時点以降における自律移動体装置の移動方向を示す映像を前記投影部に投影させてよい。
【0008】
(3)本発明の一態様は、(1)または(2)に記載の表示制御システムであって、前記表示制御部は、現時点の自律移動体装置の状態を標示する映像を前記投影部に投影させてよい。
【0009】
(4)本発明の一態様は、(3)に記載の表示制御システムであって、前記表示制御部は、現時点の自律移動体装置の状態として一時停止している場合に、当該一時停止していることを標示する映像を前記投影部に投影させてよい。
【0010】
(5)本発明の一態様は、(4)に記載の表示制御システムであって、前記表示制御部は、現時点の自律移動体装置の状態として一時停止中であって一時停止の解除までの時間が所定以内であることを示す映像を前記投影部に投影させてよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
清水建設株式会社
放射線遮蔽壁
4日前
清水建設株式会社
ビス打ち装置
14日前
清水建設株式会社
自動ビス打ち機
11日前
清水建設株式会社
杭及び杭の施工方法
4日前
清水建設株式会社
コンクリート配管の接続構造
1日前
清水建設株式会社
浮体構造物および洋上風力発電施設
8日前
清水建設株式会社
組積造構造物の補強構造および補強方法
1日前
清水建設株式会社
案内制御装置、案内制御方法、およびプログラム
3日前
清水建設株式会社
情報処理装置、情報処理方法、およびプログラム
3日前
株式会社ゴーレム
二酸化炭素排出量算出装置、二酸化炭素排出量算出方法、およびプログラム
3日前
エイブリック株式会社
基準電圧回路
8日前
株式会社クボタ
作業車
11日前
株式会社ダイフク
搬送車
11日前
ローム株式会社
半導体集積回路
16日前
エイブリック株式会社
ボルテージレギュレータ
8日前
トヨタ自動車株式会社
工作機械の制御装置
9日前
トヨタ自動車株式会社
工作機械の制御装置
10日前
株式会社ダイフク
物品搬送設備
9日前
株式会社ダイヘン
搬送車
8日前
株式会社ダイヘン
搬送車
8日前
株式会社ダイヘン
搬送車
8日前
株式会社ダイヘン
搬送車
8日前
井関農機株式会社
作業車両
4日前
ミツミ電機株式会社
多方向入力装置
14日前
ミツミ電機株式会社
多方向入力装置
14日前
ミツミ電機株式会社
多方向入力装置
14日前
ローム株式会社
バイアス回路
10日前
オルガノ株式会社
運転管理方法及び運転管理装置
11日前
ミツミ電機株式会社
多方向入力装置
14日前
ミツミ電機株式会社
多方向入力装置
14日前
ダイハツ工業株式会社
無人搬送車の制御方法
9日前
ローム株式会社
レギュレータ回路
15日前
岩井ファルマテック株式会社
監査証跡の管理システム
17日前
ローム株式会社
電源起動監視回路
9日前
新電元工業株式会社
レギュレータ回路及びインバータ回路
14日前
三菱ロジスネクスト株式会社
防衛システム
15日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ