TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025035054
公報種別
公開特許公報(A)
公開日
2025-03-13
出願番号
2023141828
出願日
2023-08-31
発明の名称
作業車両の計測システムおよび作業車両の計測方法
出願人
株式会社小松製作所
代理人
弁理士法人志賀国際特許事務所
主分類
E02F
9/20 20060101AFI20250306BHJP(水工;基礎;土砂の移送)
要約
【課題】作業対象からの反力の影響を抑えて作業車両の移動量を推定する。
【解決手段】計測部は、少なくとも作業車両の走行体の動力に係る値を含む車体データに基づいて、前記作業車両の移動量に係る値を出力する。
【選択図】図1
特許請求の範囲
【請求項1】
少なくとも作業車両の走行体の動力に係る値を含む車体データに基づいて、前記作業車両の移動量に係る値を出力する計測部、
を備える作業車両の計測システム。
続きを表示(約 890 文字)
【請求項2】
前記計測部は、車体データから移動量に係る値を出力するように学習された学習済モデルに、前記車体データを入力することで、前記移動量に係る値を出力する
請求項1に記載の作業車両の計測システム。
【請求項3】
前記計測部は、前記車体データに基づいて、前記作業車両の速度および角速度、を推定する
請求項1または請求項2に記載の作業車両の計測システム。
【請求項4】
過去の前記作業車両の位置と、前記移動量に係る値と、前記作業車両の傾斜角度とに基づいて、前記作業車両の位置を推定する第1位置推定部を備える
請求項1または請求項2に記載の作業車両の計測システム。
【請求項5】
前記車体データは、前記作業車両を駆動させるために供給される作動油の油圧、前記走行体の回転数、および前記作業車両に設けられたIMUの計測値の少なくとも1つを含む
請求項1に記載の作業車両の計測システム。
【請求項6】
前記車体データは、前記作業車両の作業機の状態に係る値をさらに含む
請求項1に記載の作業車両の計測システム。
【請求項7】
前記計測部は、前記作業車両の移動量に係る値の信頼度をさらに出力する
請求項1に記載の作業車両の計測システム。
【請求項8】
前記車体データは、前記作業車両の外部を撮像する撮像装置の計測データをさらに含む
請求項1に記載の作業車両の計測システム。
【請求項9】
計測データに基づいて前記作業車両の位置および姿勢を推定する第2位置推定部と、
前記第1位置推定部が特定した位置および前記第2位置推定部が特定した位置のいずれか一方を出力する出力部と、
を備える請求項4に記載の作業車両の計測システム。
【請求項10】
少なくとも作業車両の走行体の動力に係る値を含む車体データに基づいて、前記作業車両の移動量に係る値を出力するステップ、
を備える作業車両の計測方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、作業車両の計測システムおよび作業車両の計測方法に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
特許文献1には、ブレードの刃先を設計面に追従させる作業車両が開示されている。特許文献1に開示された技術によれば、制御装置は、GNSS(Global Navigation Satellite System)を利用して作業車両の位置を特定し、特定した位置に基づいてブレードの目標高さを決定する。
【先行技術文献】
【特許文献】
【0003】
国際公開第2015/083469号
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に開示された技術のようにGNSSを利用した制御は、施工現場の環境によってはGNSSの電波が受信できず、作業車両の位置を特定することができない可能性がある。そのため、GNSSに代えて自律航法によって作業車両の位置を特定することが考えられる。
【0005】
作業車両は、作業を行いながら走行前進することがある。作業車両は、作業対象からの反力を受けて走行することになる。この反力の影響によって、自律航法によって得られる作業車両の位置と実際の位置とに誤差が生じる可能性がある。
本開示の目的は、作業対象からの反力の影響を抑えて作業車両の移動量を推定することができる作業車両の計測システムおよび作業車両の計測方法を提供することにある。
【課題を解決するための手段】
【0006】
本開示の一態様によれば、作業車両の計測システムは、少なくとも作業車両の走行体の動力に係る値を含む車体データに基づいて、前記作業車両の移動量に係る値を出力する計測部、を備える。
【発明の効果】
【0007】
上記態様によれば、作業車両の計測システムは、作業対象からの反力の影響を抑えて作業車両の移動量を推定することができる。
【図面の簡単な説明】
【0008】
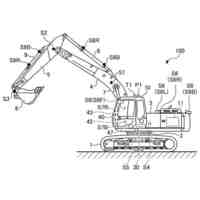
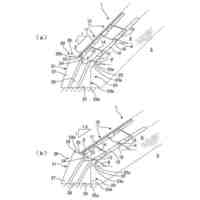
第1の実施形態に係る作業車両の側面図である。
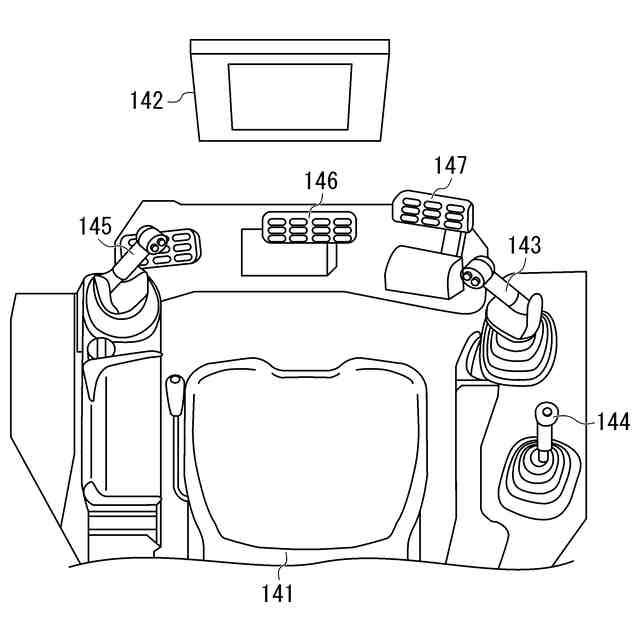
第1の実施形態に係る運転室の内部の構成を示す図である。
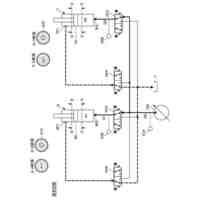
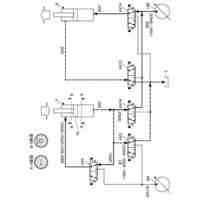
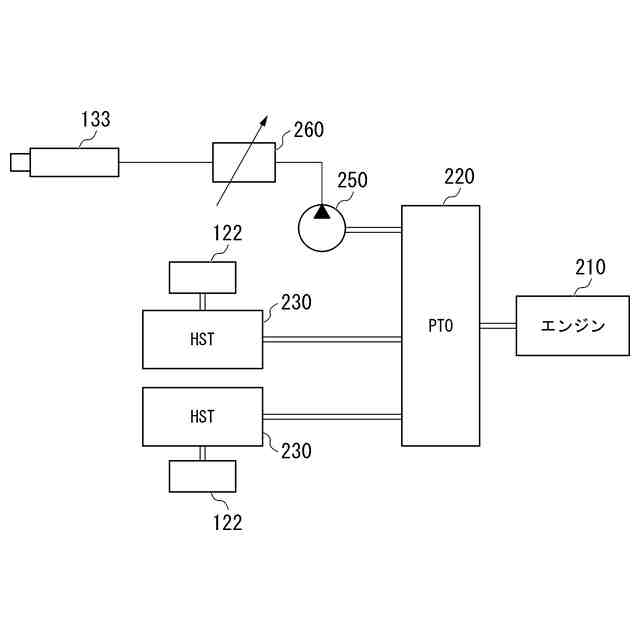
第1の実施形態に係る作業車両の動力系を示す模式図である。
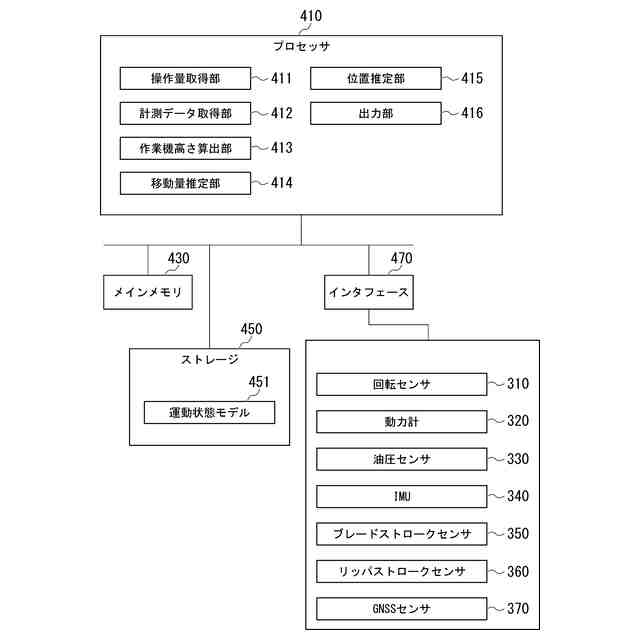
第1の実施形態に係る作業車両の計測系および制御装置の構成を示す図である。
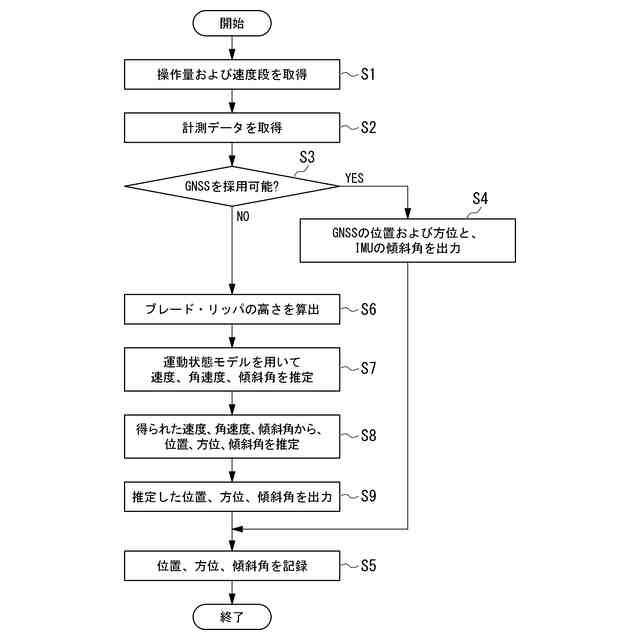
第1の実施形態に係る位置出力方法を示すフローチャートである。
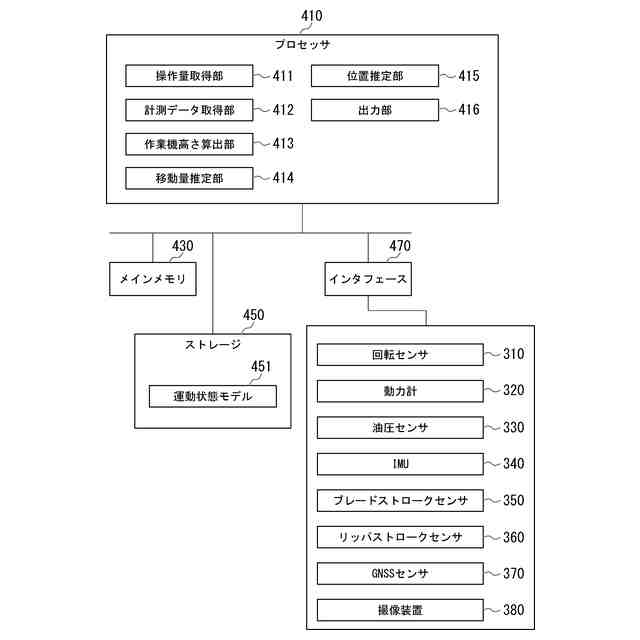
第5の実施形態に係る作業車両の計測系および制御装置の構成を示す図である。
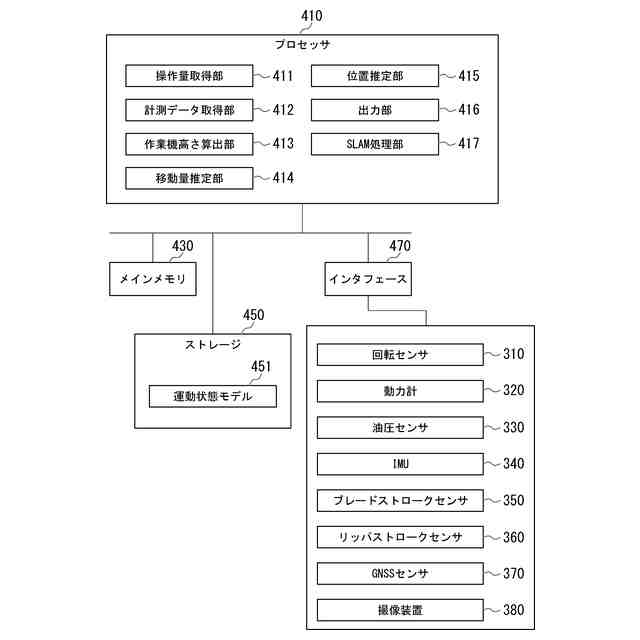
第6の実施形態に係る作業車両の計測系および制御装置の構成を示す図である。
【発明を実施するための形態】
【0009】
〈第1の実施形態〉
以下、図面を参照しながら実施形態について詳しく説明する。
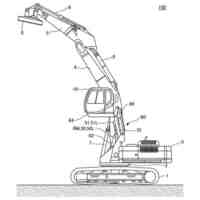
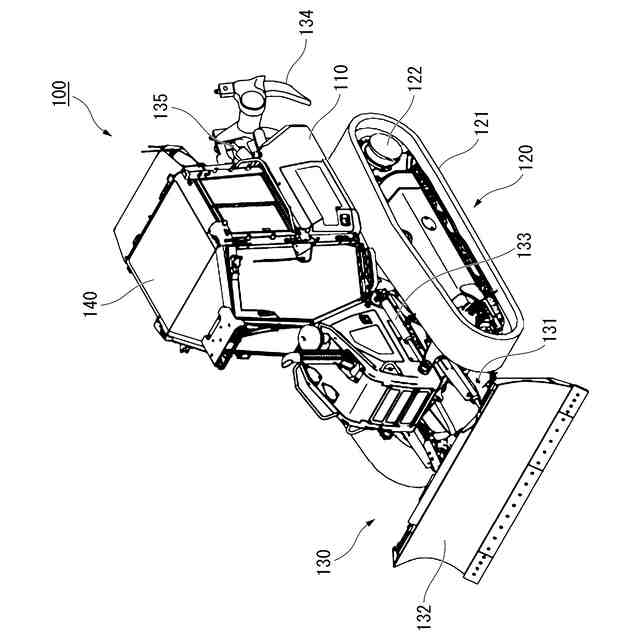
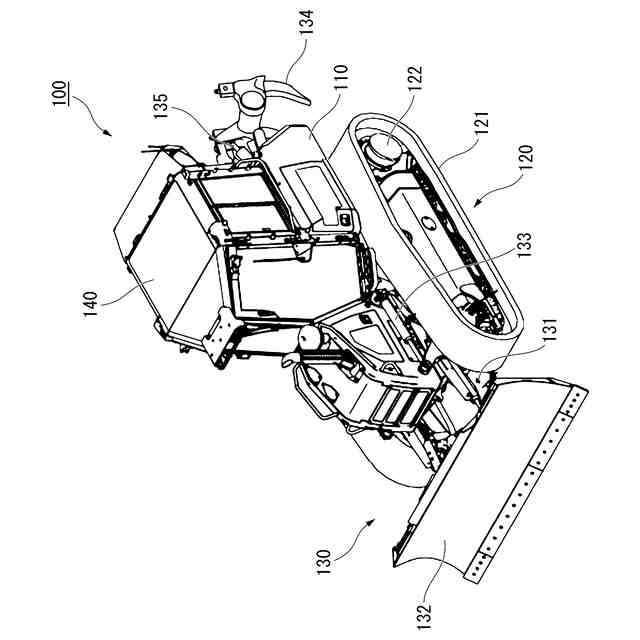
図1は、第1の実施形態に係る作業車両の側面図である。
第1の実施形態に係る作業車両100は、例えばブルドーザである。作業車両100は、車体110、走行装置120、作業機130、運転室140を備える。
【0010】
走行装置120は、車体110の下部に設けられる。走行装置120は、クローラ121、スプロケット122を一対備える。一対のクローラ121は、ぞれぞれ車体110の左と右とに設けられる。スプロケット122の駆動によってクローラ121が回転することで、作業車両100が走行する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
砂堆積ネット
今日
株式会社高橋監理
不同沈下修正機
21日前
株式会社エスイー
防災構造物
2日前
個人
一種の新型水力発電装置
今日
個人
潜水式土運船と土砂降ろし方法
21日前
ヨシモトポール株式会社
鋼管杭
1日前
住友建機株式会社
作業機械
1日前
株式会社大林組
建築物の基礎構造及び方法
7日前
カナデビア株式会社
サクション基礎
21日前
大和ハウス工業株式会社
建物
1日前
株式会社遠藤工業
地中障害物撤去方法
1日前
住友重機械工業株式会社
作業機械
1日前
住友重機械工業株式会社
ショベル
1日前
住友重機械工業株式会社
ショベル
1日前
株式会社オーイケ
擁壁および基礎ブロック
21日前
埼玉八栄工業株式会社
地盤撹拌装置
14日前
株式会社竹内製作所
作業用車両
7日前
株式会社竹内製作所
作業用車両
11日前
株式会社竹内製作所
作業用車両
11日前
大和ハウス工業株式会社
建物の支持機構
1日前
鹿島建設株式会社
排水構造体
1日前
株式会社加藤建設
固化材の吐出方法
2日前
有限会社Kunioka-ele
ホール用仮設蓋
今日
ジャパンパイル株式会社
中空既製杭の吊り下げ装置
2日前
株式会社本久
砂防ソイルセメント材の品質管理方法
11日前
株式会社CSPホールディングス
杭抜き方法
7日前
ヤンマーホールディングス株式会社
作業機械
今日
日立建機株式会社
作業機械
7日前
日立建機株式会社
建設機械
7日前
日立建機株式会社
作業機械
7日前
株式会社みどり工学研究所
上下動抑制埋設支柱及び埋設工法
7日前
アロン化成株式会社
排水設備用蓋
21日前
日立建機株式会社
建設機械
7日前
日立建機株式会社
作業機械
1日前
清水建設株式会社
山留め工法及び山留め構造
7日前
株式会社ササキコーポレーション
除去作業機
8日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ