TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025030137
公報種別
公開特許公報(A)
公開日
2025-03-07
出願番号
2023135165
出願日
2023-08-23
発明の名称
ロボットシステムおよびパラメータ同定方法
出願人
パナソニックIPマネジメント株式会社
代理人
個人
主分類
B25J
9/10 20060101AFI20250228BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】モデル化パラメータを容易に同定する。
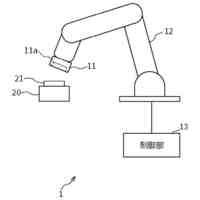
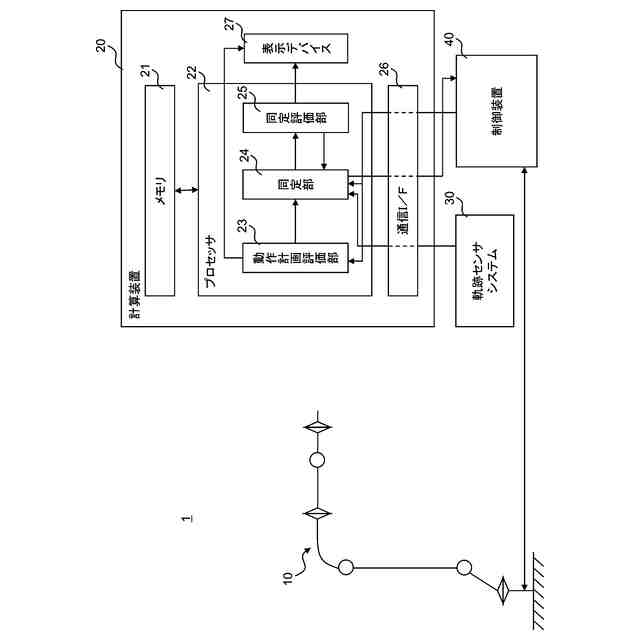
【解決手段】ロボットシステムは、3軸以上の自由度を有するロボットと、動作計画に基づいてロボットを動作させる制御装置と、動作計画に基づいてロボットが動作したときのロボットの制御点の軌跡を測定する測定装置と、動作計画および制御点の軌跡に基づいて制御装置がロボットの制御点の位置を算出するために必要なモデル化パラメータの設定誤差を推定しモデル化パラメータを同定するプロセッサを有する。
【選択図】図3
特許請求の範囲
【請求項1】
3軸以上の自由度を有するロボットと、
動作計画に基づいて前記ロボットを動作させる制御装置と、
前記動作計画に基づいて前記ロボットが動作したときの前記ロボットの制御点の軌跡を測定する測定装置と、
前記動作計画および前記制御点の軌跡に基づいて前記制御装置が前記ロボットの前記制御点の位置を算出するために必要なモデル化パラメータの設定誤差を推定し前記モデル化パラメータを同定するプロセッサと、を有する、
ロボットシステム。
続きを表示(約 1,100 文字)
【請求項2】
前記プロセッサは、
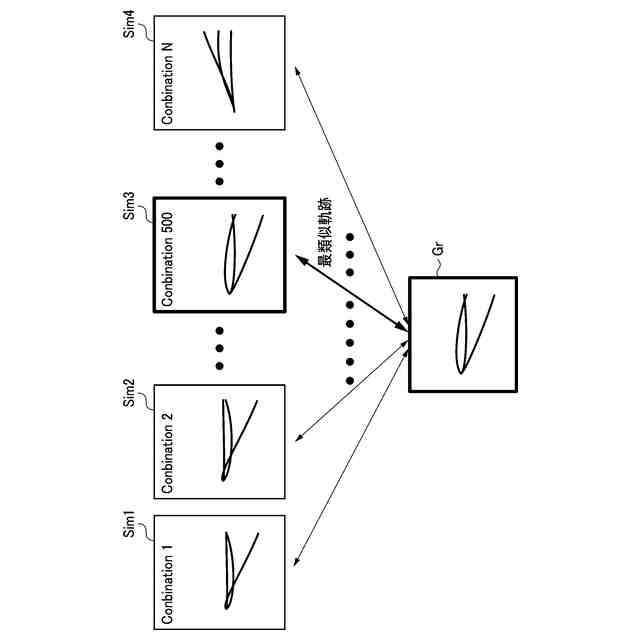
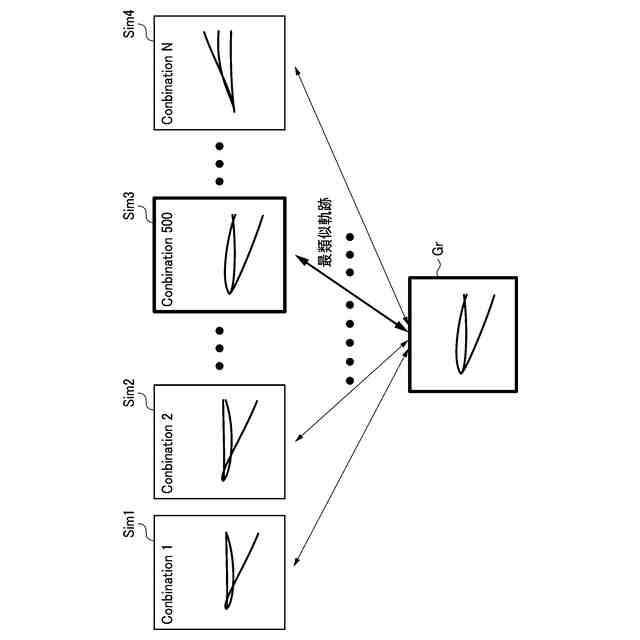
前記動作計画と任意の設定誤差を含むモデル化パラメータとを用いて前記制御点の軌跡を計算した計算制御点軌跡を複数求め、
前記測定装置によって測定された前記制御点の軌跡と前記計算制御点軌跡それぞれとの類似度を算出し、
前記類似度が最も高い計算制御点軌跡を計算するのに用いた設定誤差を前記モデル化パラメータの設定誤差であると推定する、
請求項1に記載のロボットシステム。
【請求項3】
前記プロセッサは、
同定した前記モデル化パラメータの信頼度を前記類似度が閾値以上であるか否かの判定に基づいて評価し、
前記類似度が閾値未満であると判定した場合、前記測定装置に再び前記制御点の軌跡を測定させ、
前記動作計画および再び測定された前記制御点の軌跡に戻づいて前記モデル化パラメータの設定誤差を推定し前記モデル化パラメータを同定する、
請求項2に記載のロボットシステム。
【請求項4】
表示デバイスを、さらに備え、
前記プロセッサは、前記類似度が閾値以上であると判定した場合、前記表示デバイスに評価結果を表示する、
請求項3に記載のロボットシステム。
【請求項5】
前記制御装置は、前記モデル化パラメータの設定誤差に基づいて前記ロボットを制御する動作を変更する、
請求項1に記載のロボットシステム。
【請求項6】
前記プロセッサは、前記制御装置のモデル化パラメータを同定した前記モデル化パラメータに書き換える、
請求項1に記載のロボットシステム。
【請求項7】
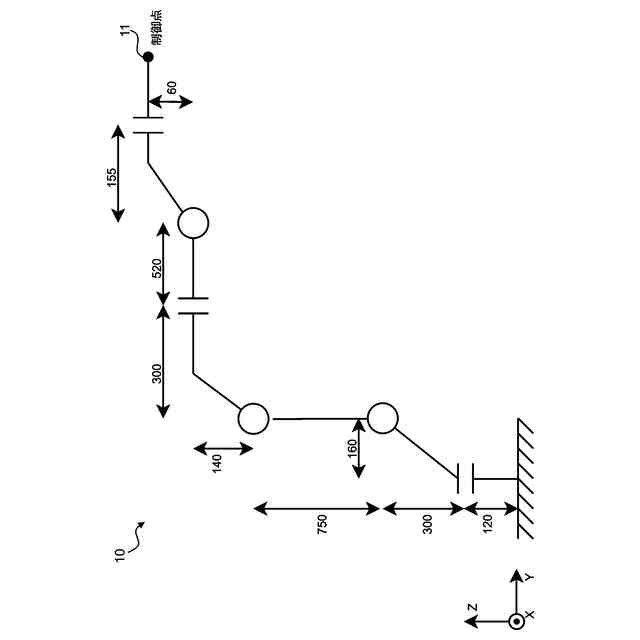
前記動作計画は、前記制御点の初期位置からの変位が300mm以下であることを特徴とする動作計画である、
請求項1に記載のロボットシステム。
【請求項8】
前記動作計画は、前記制御点の3次元位置の変位が0.05mm以下である状態で前記ロボットの姿勢が変化する動作計画である、
請求項7に記載のロボットシステム。
【請求項9】
前記プロセッサは、前記計算制御点軌跡それぞれが互いに類似していないという条件を満たす動作計画であるか否かを判定する、
請求項2に記載のロボットシステム。
【請求項10】
前記モデル化パラメータは、各軸の原点、ツールオフセット、各軸の回転方向の剛性値、軸剥がれ方向の剛性値、軸間の捻じれ誤差、各軸間の位置関係誤差およびリンク長のいずれかの組み合わせである、
請求項1に記載のロボットシステム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、ロボットシステムおよびパラメータ同定方法に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
特許文献1には、直動軸を含むロボットおよびNC加工機などの幾何学的な誤差を導出する際に、導出解が一意に算出され、かつ計算の高速化および導出誤差の精度の向上を図り得る機差導出方法が開示されている。機差導出方法は、まず先端に加工工具を取り付けた機構を各種パラメータで表すデナビット・ハーテンベルグの記法を用いてモデル化する。機差導出方法は、次に、機構を動作させた時の加工工具の位置・姿勢を計測し、機構を動作させた時の加工工具の位置・姿勢をモデルを用いて推定する。機差導出方法は、次に、加工工具の位置・姿勢の計測値と推定値とを比較することにより機構の機差を導出する。また、機差導出方法では、モデル中に機構の駆動軸の座標を変化させるパラメータのみが用いられる。
【先行技術文献】
【特許文献】
【0003】
特開平7-28514号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
本開示は、上述した従来の状況に鑑みて案出され、モデル化パラメータを容易に同定することを目的とする。
【課題を解決するための手段】
【0005】
本開示は、3軸以上の自由度を有するロボットと、動作計画に基づいて前記ロボットを動作させる制御装置と、前記動作計画に基づいて前記ロボットが動作したときの前記ロボットの制御点の軌跡を測定する測定装置と、前記動作計画および前記制御点の軌跡に基づいて前記制御装置が前記ロボットの前記制御点の位置を算出するために必要なモデル化パラメータの設定誤差を推定し前記モデル化パラメータを同定するプロセッサを有する、ロボットシステムを提供する。
【0006】
また、本開示は、3軸以上の自由度を有するロボットと、動作計画に基づいて前記ロボットを動作させる制御装置と、前記動作計画に基づいて前記ロボットが動作したときの前記ロボットの制御点の軌跡を測定する測定装置と、前記動作計画および前記制御点の軌跡に基づいてモデル化パラメータの設定誤差を推定し前記モデル化パラメータを同定するプロセッサと、表示デバイスと、を備え、前記プロセッサは、前記モデル化パラメータの同定結果を前記表示デバイスに表示させる、ロボットシステムを提供する。
【0007】
また、本開示は、3軸以上の自由度を有するロボットと、動作計画に基づいて前記ロボットを動作させる制御装置と、前記動作計画に基づいて前記ロボットが動作したときの前記ロボットの制御点の軌跡を測定する測定装置と、前記動作計画および前記制御点の軌跡に基づいてモデル化パラメータの設定誤差を推定し前記モデル化パラメータを同定するプロセッサと、記憶されているモデル化パラメータを、前記プロセッサによって同定された前記モデル化パラメータに変更するメモリと、を備える、ロボットシステムを提供する。
【0008】
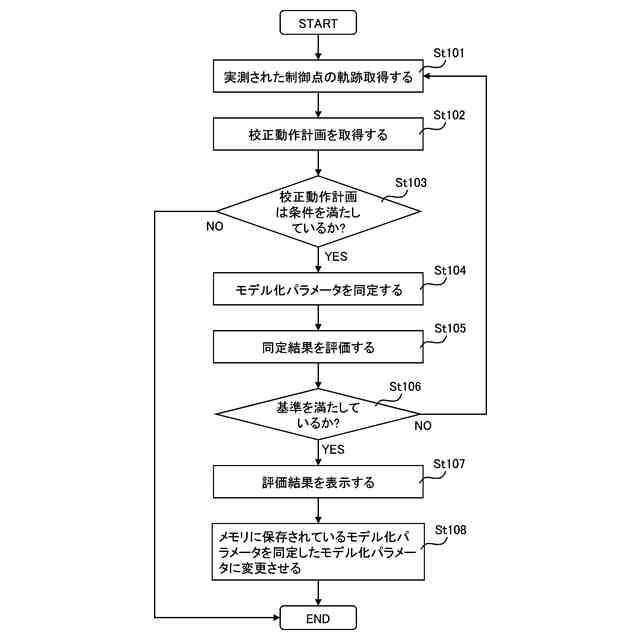
また、本開示は、動作計画に基づいて3軸以上の自由度を有するロボットを動作させ、前記動作計画に基づいて前記ロボットが動作したときの前記ロボットの制御点の軌跡を測定し、前記動作計画および前記制御点の軌跡に基づいて前記ロボットの前記制御点の位置を算出するために必要なモデル化パラメータの設定誤差を推定し前記モデル化パラメータを同定する、パラメータ同定方法を提供する。
【0009】
なお、これらの包括的または具体的な態様は、システム、装置、方法、集積回路、コンピュータプログラム、または、記録媒体で実現されてもよく、システム、装置、方法、集積回路、コンピュータプログラムおよび記録媒体の任意な組み合わせで実現されてもよい。
【発明の効果】
【0010】
本開示によれば、モデル化パラメータを容易に同定することができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
腰袋
27日前
株式会社アイセイ
搬送装置
今日
国立大学法人金沢大学
ロボット
6日前
株式会社マキタ
電動工具
1か月前
株式会社マキタ
電動工具
20日前
株式会社ケー・エフ・シー
締結構造
10日前
川崎重工業株式会社
ロボットアーム
1か月前
川崎重工業株式会社
ロボットリスト
1か月前
川崎重工業株式会社
ロボットアーム
1か月前
日本車輌製造株式会社
締め付け工具
1か月前
日本信号株式会社
作業機制御システム
20日前
川崎重工業株式会社
ロボットシステム
1か月前
CKD株式会社
吸着型搬送装置
1か月前
株式会社安川電機
ロボット
1か月前
株式会社安川電機
ロボット
1か月前
ジヤトコ株式会社
圧入装置
1か月前
株式会社京阪エンジニアリング
脱着装置
21日前
株式会社安川電機
ロボット
1か月前
株式会社マキタ
集塵アタッチメント
20日前
株式会社スター精機
ワーク搬送装置
24日前
アピュアン株式会社
衝撃工具
1日前
トヨタ自動車株式会社
把持装置、把持方法
14日前
モトコマ株式会社
寄せポンチホルダー
1か月前
株式会社コスメック
把持装置
7日前
トヨタ自動車株式会社
制御装置及び制御方法
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
川崎重工業株式会社
ロボットシステム
27日前
国立大学法人 東京大学
ロボットアーム
7日前
個人
ターンバックル用工具
1か月前
株式会社DailyColor
ロボットハンド
1か月前
株式会社ダイヘン
ロボット制御システム
10日前
有限会社松尾エンジニアリング
連結部材
1か月前
株式会社SHIN‐JIGEN
上肢アシスト装置
1か月前
原利興工業有限公司
工具用スリーブ
6日前
株式会社不二越
ロボットビジョンシステム
13日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ