TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025029927
公報種別
公開特許公報(A)
公開日
2025-03-07
出願番号
2023134822
出願日
2023-08-22
発明の名称
パラレルリンク機構、運搬装置および作業用ロボット
出願人
新東工業株式会社
,
国立大学法人山梨大学
代理人
弁理士法人 HARAKENZO WORLD PATENT & TRADEMARK
主分類
F16H
21/54 20060101AFI20250228BHJP(機械要素または単位;機械または装置の効果的機能を生じ維持するための一般的手段)
要約
【課題】可動リンクの動作によって回動体を回動させるパラレルリンク機構において、機構を大きくすることなく、回動体の回動幅を広げる。
【解決手段】パラレルリンク機構(100a)は、ガイド部材(124)を備えるベース(1)と、ガイド部材に沿って移動可能な移動体(2)と、ベースに基端部が固定されるとともにベースから離れる方向に延びる固定リンク(3)と、固定リンクの先端部に接続されるとともに先端部を中心に回動可能な回動体(4)と、基端部が移動体に連結されるとともに先端部が回動体に連結され、移動体の移動に応じて回動体を回動させる可動リンク(5)と、を備え、ガイド部材は、ベース本体11の中央部から離れるほど回動体へ近づくように傾斜している。
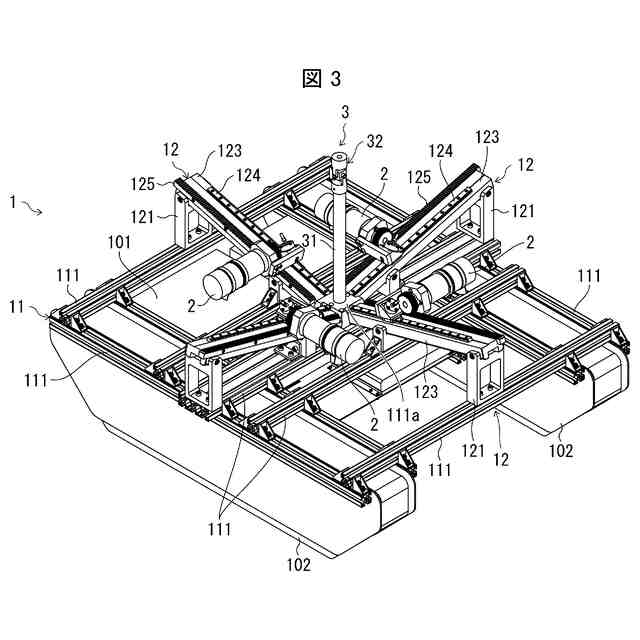
【選択図】図3
特許請求の範囲
【請求項1】
ベース本体と、当該ベース本体の中央部から、周縁部へと離れていく方向であって互いに異なる方向へそれぞれ延びる複数のガイド部材と、を備えるベースと、
前記ガイド部材のそれぞれに沿って移動可能な複数の移動体と、
前記ベース本体の中央部に基端部が固定されるとともに、前記ベースから離れる方向に延びる固定リンクと、
前記固定リンクの先端部に中心部が接続されるとともに、前記先端部を中心に回動可能な回動体と、
基端部がそれぞれ前記移動体に連結されるとともに先端部がそれぞれ前記回動体の周縁部に連結され、前記移動体の移動に応じて前記回動体を回動させる複数の可動リンクと、
水平面に対する前記回動体の傾きを検知するセンサと、
前記センサの検知結果に基づいて、前記水平面に対する前記回動体の傾きが所望の大きさになるように前記複数の移動体の移動を制御するプロセッサと、
を備え、
前記複数のガイド部材の少なくともいずれかは、前記ベース本体の中央部から離れるほど前記回動体へ近づくように傾斜している、
ことを特徴とするパラレルリンク機構。
続きを表示(約 1,500 文字)
【請求項2】
前記固定リンクは、前記ベース本体の中央部から上方へ延び、
前記回動体は、前記ベースの上方に配置されるとともに、下面中心部において前記固定リンクの先端部と接続され、上面に積載物を載置可能な荷台であり、
前記複数のガイド部材の少なくともいずれかは、前記ベース本体の中央部から離れるほど上がっていくように傾斜しており、
前記プロセッサは、前記回動体の傾きを検知した場合に、当該回動体の傾きが無くなるように前記複数の移動体の移動を制御する、
ことを特徴とする請求項1に記載のパラレルリンク機構。
【請求項3】
前記固定リンクは、前記ベース本体の中央部から下方へ延び、
前記回動体は、前記ベースの下方に配置されるとともに、上面中心部において前記固定リンクの先端部と接続され、下面に工具を取り付け可能であり、
前記複数のガイド部材の少なくともいずれかは、前記ベース本体の中央部から離れるほど下がっていくように傾斜しており、
前記プロセッサは、前記回動体の動作指示を取得した場合に、前記水平面に対する前記回動体の傾きが前記動作指示に応じた大きさになるように前記複数の移動体の移動を制御する、
ことを特徴とする請求項1に記載のパラレルリンク機構。
【請求項4】
前記ガイド部材は、当該ガイド部材と並行に延びるラックを備え、
各移動体は、
前記プロセッサの制御に従って回転するモータと、
前記ラックと噛み合うとともに、前記モータの回転に応じて回転するピニオンと、
を備える、
ことを特徴とする請求項1から3の何れか一項に記載のパラレルリンク機構。
【請求項5】
前記モータは、ダイレクトドライブモータである、
ことを特徴とする請求項4に記載のパラレルリンク機構。
【請求項6】
前記移動体は、前記モータと前記ピニオンとの間に減速機を備える、
ことを特徴とする請求項4に記載のパラレルリンク機構。
【請求項7】
前記移動体は、前記モータの回転方向および回転角度を検知するエンコーダを備え、
前記プロセッサは、前記エンコーダによる検知結果に基づいて前記モータを回転させる、
ことを特徴とする請求項4に記載のパラレルリンク機構。
【請求項8】
前記複数のガイド部材は、前記ベース本体の中央部から、前方、後方および左右両側方へそれぞれ延びるとともに、全て前記ベース本体の中央部から離れるほど前記回動体へ近づくように傾斜しており、
前記複数の可動リンクの各先端部は、前記回動体の前後左右各端部にそれぞれ連結されている、
ことを特徴とする請求項1に記載のパラレルリンク機構。
【請求項9】
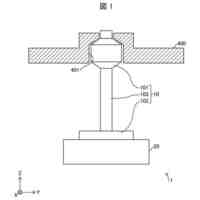
前記固定リンクの先端部は、前記回動体の中心部に、前記固定リンクの延長方向と直交する方向に延びる軸部を有する可動ジョイントとなっており、
前記回動体は、前記軸部を回転軸として回動可能となるように、前記固定リンクと連結されている、
ことを特徴とする請求項1に記載のパラレルリンク機構。
【請求項10】
前記可動ジョイントは、
前後方向に延びる第一軸部と、
左右方向に延びる第二軸部と、
を有し、
前記回動体は、前記第一軸部を回転軸として回動可能となるように、かつ前記第二軸部を回転軸として回動可能となるように、前記固定リンクと連結されている、
ことを特徴とする請求項9に記載のパラレルリンク機構。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明はパラレルリンク機構、運搬装置および作業用ロボットに関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
従来、特許文献1に記載されたような台部安定化装置が知られている。この台部安定化装置は、基部と、台部と、中央支持部と、第一昇降支持部と、第二昇降支持部と、を備える。中央支持部は、基部と台部の下面中央との間における距離を一定に維持するとともに、該基部に対する該台部の角度が自在となるように支持する。第一昇降支持部は、進行方向の前方または後方に中央支持部から適宜間隔を有して配置される。第二昇降支持部は、進行方向に対して直交方向に中央支持部から適宜間隔を有して配置される。各昇降支持部は、リンク機構を介して昇降制御される。リンク機構は、サーボモータの回転駆動力により回転する駆動アームと、この駆動アームの先端に球面軸受を介して接続される昇降軸とを備え、該昇降軸の先端が球面軸受を介して前記台部の裏面に接続される。
【先行技術文献】
【特許文献】
【0003】
特開2019-93981号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
このようなパラレルリンク機構を用いて台部を水平に保つ運搬装置は、様々な場所での活躍が期待されている。しかし、上記のような従来技術では、基部に対する台部の回動幅が小さく、大きく傾斜した斜面では台部を水平に保てなくなることがあった。このため、従来技術は、林業のような、険しい斜面での作業を伴う産業での利用が困難であった。一方、台部を傾ける機構を大きくすることで、基部に対する台部の回動幅をある程度大きくすることは可能である。しかし、機構が大きくなると、運搬装置が全体的に大型化し、例えば、台部が高すぎて積載物の積み下ろしが困難になる、幅が広すぎて道を通りにくくなる等の新たな問題が生じてしまう。また、こうした回動幅と機構の大きさのトレードオフの問題は、作業用ロボットの分野においても課題となっていた。
【0005】
本発明の一態様は、上記課題に鑑みてなされたもので、その目的は、可動リンクの動作によって回動体を回動させるパラレルリンク機構において、機構を大きくすることなく、回動体の回動幅を広げることにある。
【課題を解決するための手段】
【0006】
上記の課題を解決するために、本発明の一態様に係るパラレルリンク機構は、ベース本体と、当該ベース本体の中央部から、周縁部へと離れていく方向であって互いに異なる方向へそれぞれ延びる複数のガイド部材と、を備えるベースと、前記ガイド部材のそれぞれに沿って移動可能な複数の移動体と、前記ベース本体の中央部に基端部が固定されるとともに、前記ベースから離れる方向に延びる固定リンクと、前記固定リンクの先端部に中心部が接続されるとともに、前記先端部を中心に回動可能な回動体と、基端部がそれぞれ前記移動体に連結されるとともに先端部がそれぞれ前記回動体の周縁部に連結され、前記移動体の移動に応じて前記回動体を回動させる複数の可動リンクと、水平面に対する前記回動体の傾きを検知するセンサと、前記センサの検知結果に基づいて、前記水平面に対する前記回動体の傾きが所望の大きさになるように前記複数の移動体の移動を制御するプロセッサと、を備え、前記複数のガイド部材の少なくともいずれかは、前記ベース本体の中央部から離れるほど前記回動体へ近づくように傾斜している、ことを特徴とする。
【0007】
また、上記の課題を解決するために、本発明の他の態様に係る運搬装置は、地面の上を移動可能な移動機構と、前記移動機構の上に搭載された上記パラレルリンク機構と、を備える、ことを特徴とする。
【0008】
また、上記の課題を解決するため、本発明の他の態様に係る作業用ロボットは、上記パラレルリンク機構と、前記パラレルリンク機構の回動体の下面に取り付けられた工具と、を備える、ことを特徴とする。
【発明の効果】
【0009】
本発明の各態様によれば、可動リンクの動作によって回動体を回動させるパラレルリンク機構において、機構を大きくすることなく、回動体の回動幅を広げることができる。
【図面の簡単な説明】
【0010】
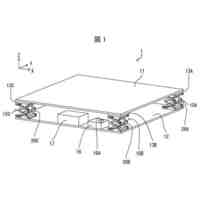
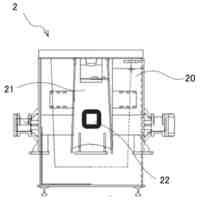
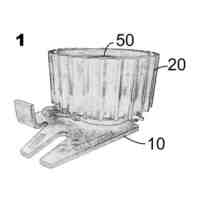
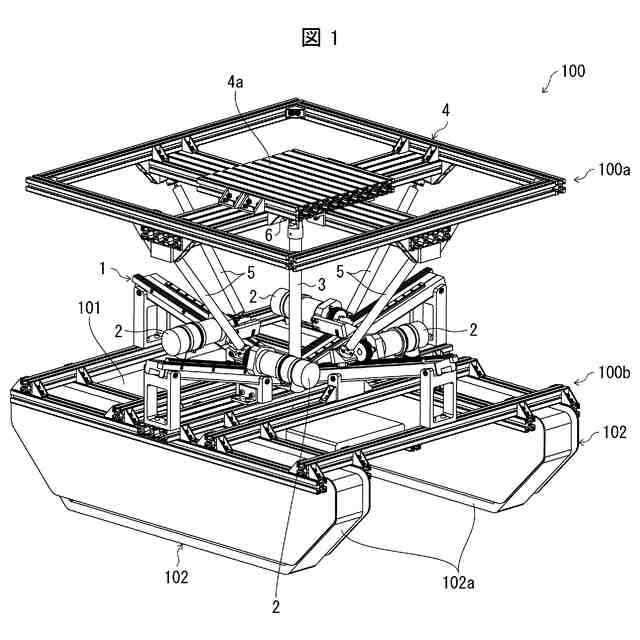
本発明の第一実施形態に係る運搬装置の一例を示す斜視図である。
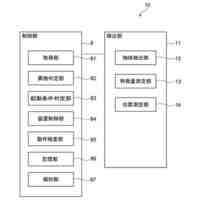
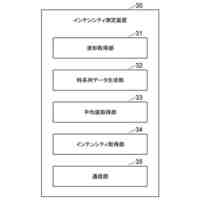
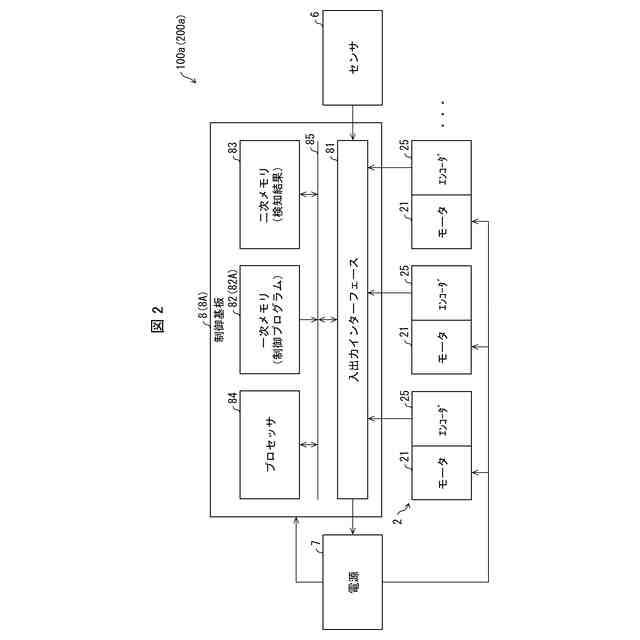
同装置(本発明の第二実施形態に係る作業用ロボット)が備えるパラレルリンク機構の電気的構成を示すブロック図である。
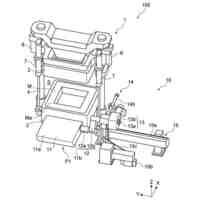
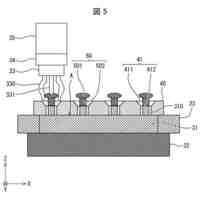
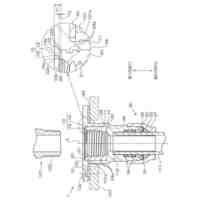
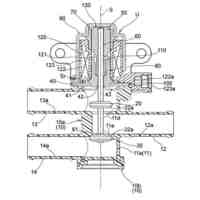
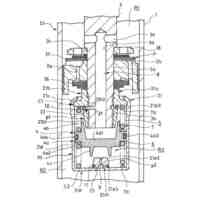
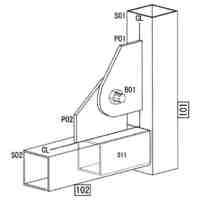
同機構が備えるベース、移動体、および固定リンクを示す斜視図である。
図3の一部を拡大して示す斜視図である。
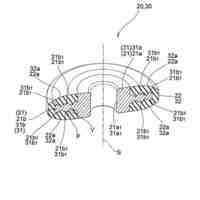
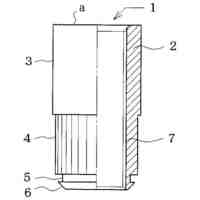
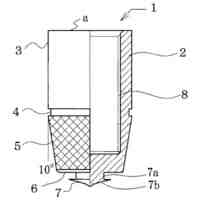
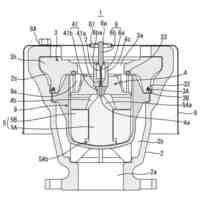
同機構が備える固定リンクの先端部を示す斜視図である。
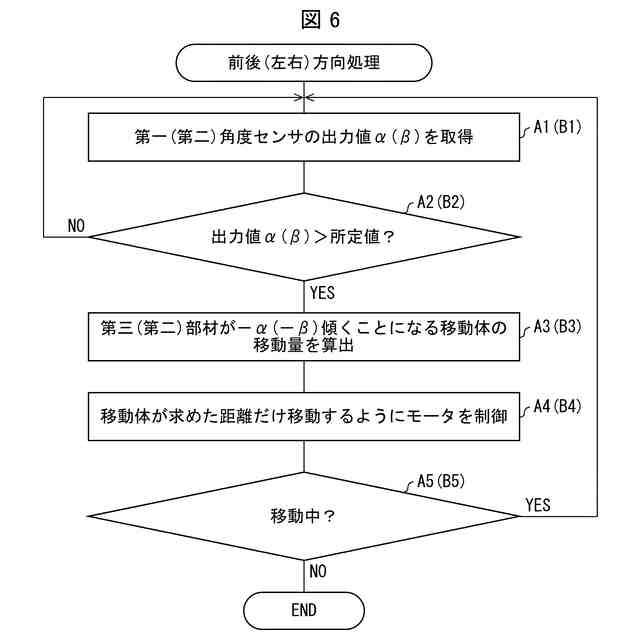
同機構のプロセッサが実行する処理の流れを示すフローチャートである。
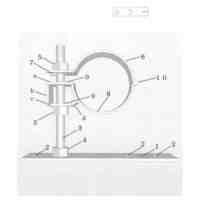
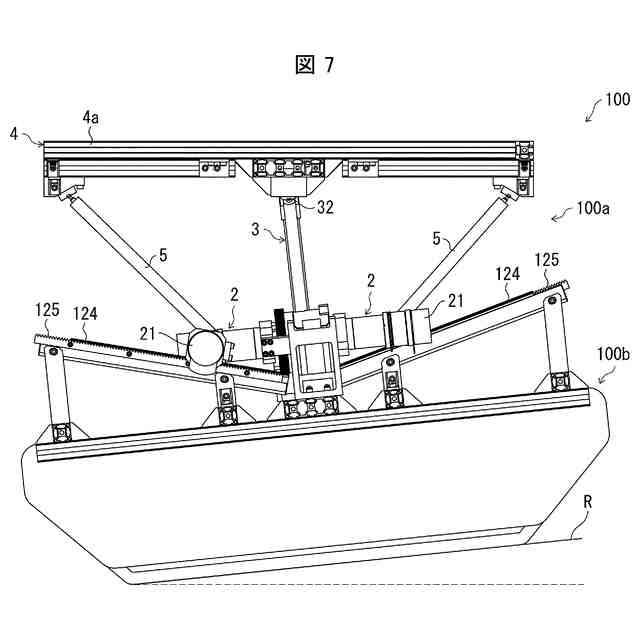
斜面上を移動する運搬装置を示す側面図である。
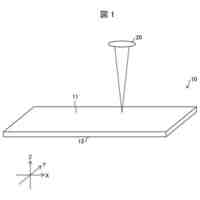
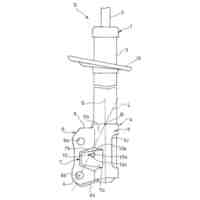
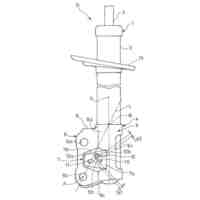
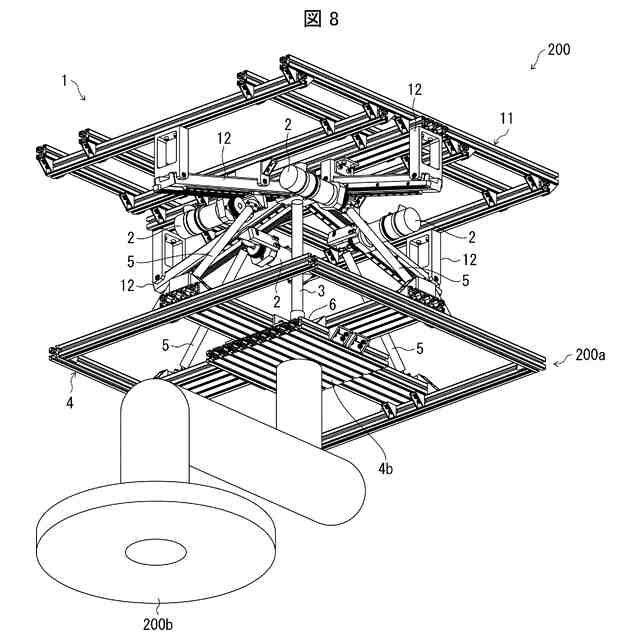
本発明の第二実施形態に係る作業用ロボットの一例を示す斜視図である。
同ロボットが備えるパラレルリンク機構のプロセッサが実行する処理の流れを示すフローチャートである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
新東工業株式会社
粉体供給装置
13日前
新東工業株式会社
情報処理装置
2か月前
新東工業株式会社
中子セット装置
22日前
新東工業株式会社
基材及び基材の加工方法
2か月前
新東工業株式会社
パレットおよび積載システム
1か月前
新東工業株式会社
分級装置及び粉塵固化システム
3か月前
新東工業株式会社
抜枠ユニット、造型機及び抜枠方法
1か月前
新東工業株式会社
装置検査システム及び装置検査方法
1か月前
新東工業株式会社
ブラシ研磨装置、及びウエハ保持装置の製造方法
13日前
東京窯業株式会社
注湯装置
2か月前
新東工業株式会社
アルコール濃度特定装置、サーバ装置、及び管理システム
2か月前
新東工業株式会社
検査装置、検査方法及びディスクブレーキプレートの製造方法
3か月前
新東工業株式会社
ピックアップ方法、ピックアップ装置およびピックアップシステム
26日前
新東工業株式会社
インテンシティ測定装置、インテンシティ測定システム、及び、インテンシティ測定方法
1か月前
個人
ホース保持具
3か月前
個人
トーションバー
3か月前
個人
差動歯車用歯形
26日前
株式会社不二工機
電磁弁
2か月前
株式会社不二工機
電磁弁
20日前
個人
ボルトナットセット
4か月前
個人
回転式配管用支持具
5か月前
株式会社オンダ製作所
継手
5か月前
カヤバ株式会社
緩衝器
15日前
カヤバ株式会社
ダンパ
28日前
カヤバ株式会社
ダンパ
28日前
株式会社三協丸筒
枠体
3か月前
カヤバ株式会社
緩衝器
4か月前
株式会社ミクニ
弁装置
5か月前
株式会社ミクニ
弁装置
5か月前
個人
ベルトテンショナ
4か月前
カヤバ株式会社
緩衝器
15日前
カヤバ株式会社
緩衝装置
5か月前
個人
角型菅の連結構造及び工法
5か月前
個人
固着具と固着具の固定方法
2か月前
個人
固着具と固着具の固定方法
2か月前
協和工業株式会社
空気弁
5か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ